



















































































































Kit braccio robotico da scrivania RoArm-M2 con servo bus seriale ad alta coppia Waveshare
Pre-order
Spedizione gratuita da 30€ in Germania, 50€ nell'UE!
- I preordini saranno spediti entro 5 giorni lavorativi.
- Tempi di consegna per paesi UE e USA: 10 giorni lavorativi.
- Tempi di consegna per altri paesi: 15 giorni lavorativi.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Kit braccio robotico da scrivania RoArm-M2 con servo bus seriale ad alta coppia Waveshare
RoArm-M2
Braccio robotico servo a bus seriale ad alta coppia a 4 DOF
Supporta espansione flessibile e sviluppo secondario

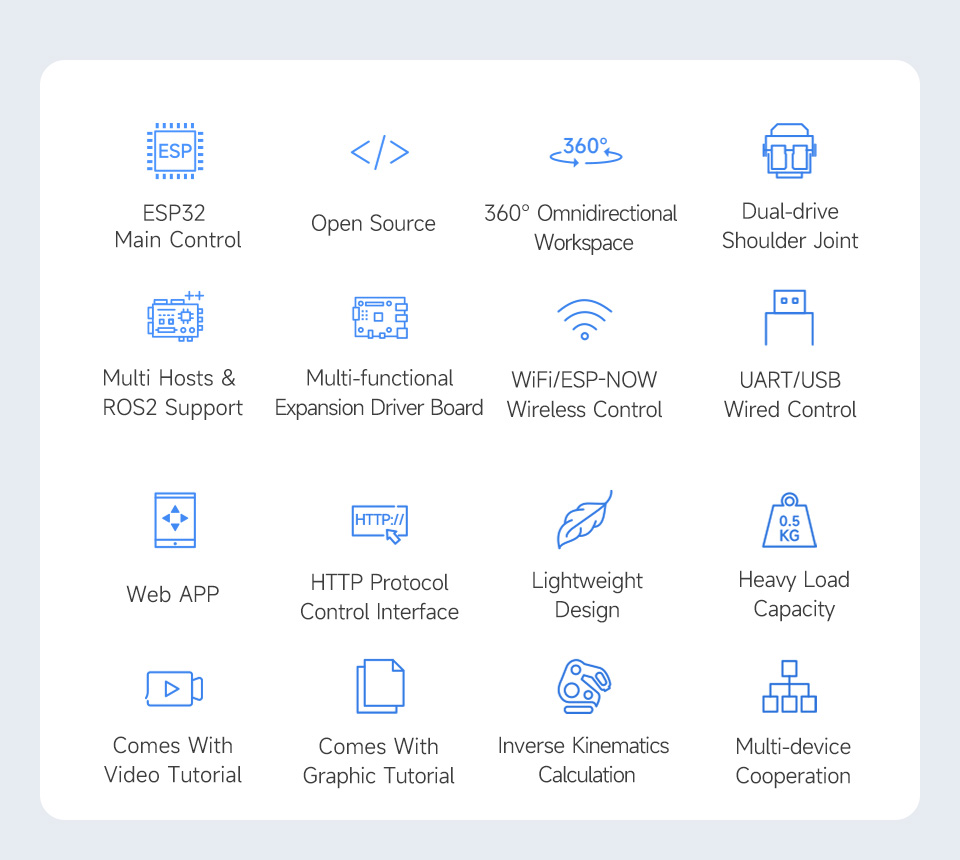
Caratteristiche a colpo d'occhio
La serie RoArm-M2 è un braccio robotico intelligente a 4DOF progettato per applicazioni innovative. Adotta un design strutturale leggero con un peso totale inferiore a 900g e un carico utile effettivo di [email protected], può essere montato in modo flessibile su varie piattaforme mobili. Adotta una base omnidirezionale a 360° combinata con tre articolazioni flessibili per creare un'area di lavoro con un diametro di 1 metro.
Il design a trasmissione diretta delle articolazioni migliora la precisione di riposizionamento e aumenta anche l'affidabilità strutturale, con una tecnologia innovativa a doppia trasmissione che raddoppia la coppia dell'articolazione della spalla. Il modulo di controllo principale MCU ESP32 integrato supporta molteplici modalità di controllo wireless, fornisce interfacce di controllo e ricchi protocolli di comunicazione per collegarsi facilmente a vari dispositivi.
Fornisce un'applicazione WEB user-friendly e multipiattaforma che integra una modalità di controllo coordinato semplice e visualizzata, rendendo più facile iniziare. Include tutorial ricchi di grafica e video per aiutarti a imparare e usarlo rapidamente. Compatibile con ROS2 e vari computer host, supporta diverse modalità di comunicazione wireless e cablata. Include una piastra di espansione, supporta la personalizzazione dell'EoAT (End of Arm Tooling) per soddisfare i requisiti di applicazioni innovative.
La serie RoArm-M2 raggiunge un eccellente equilibrio tra leggerezza, facilità d'uso, espandibilità e innovazione aperta, è un braccio robotico multifunzionale che integra controllo intelligente, interazione uomo-macchina e sviluppo personalizzabile. Ideale per applicazioni che richiedono una combinazione di flessibilità, espandibilità e facilità d'uso.
Opzioni di versione
Fornisce opzioni per RoArm-M2-S / RoArm-M2-Pro. La versione aggiornata RoArm-M2-Pro è dotata di servocomandi bus ST3235 completamente in metallo, offrendo un corpo più robusto e un gioco stabile che non aumenta con l'uso, migliorando la durata del prodotto.

Confronto parametri
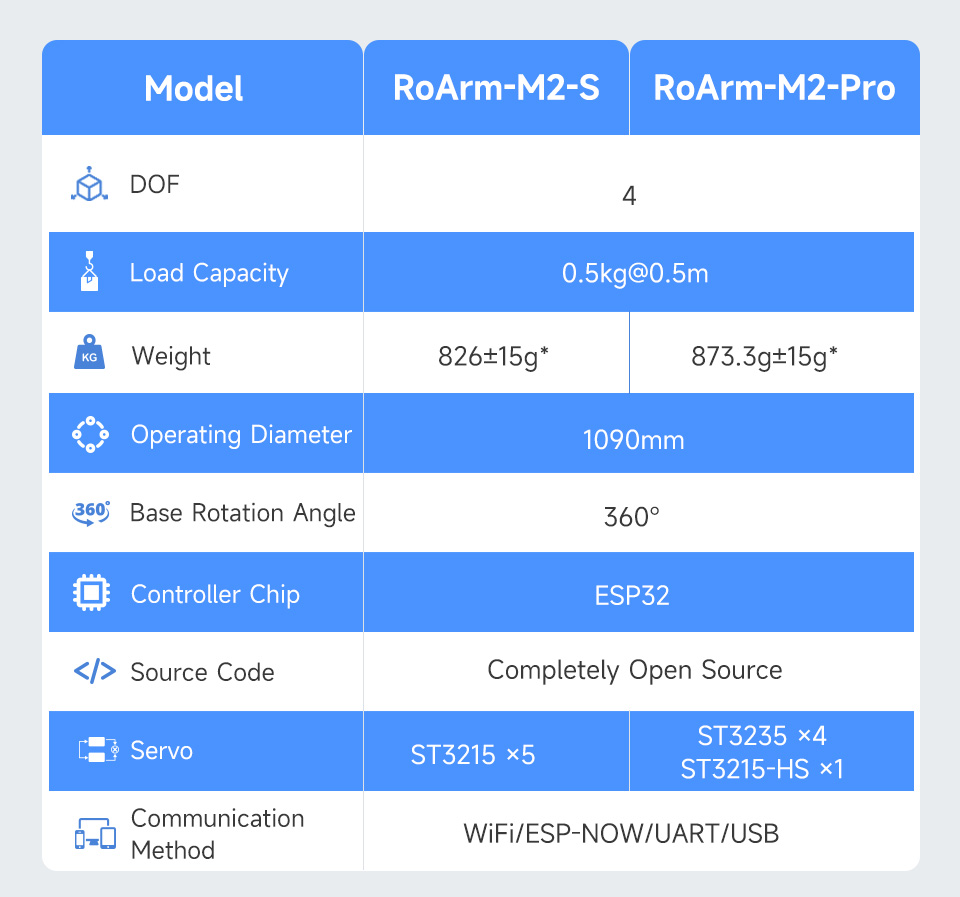
* Escluso il peso della pinza di fissaggio al bordo del tavolo (290g).
Molteplici metodi di montaggio EoAT
L'EoAT supporta vari metodi di montaggio, può essere usato come pinza o come quarto grado di libertà. Fornisce modelli DXF e 3D open source per il fai-da-te e lo sviluppo secondario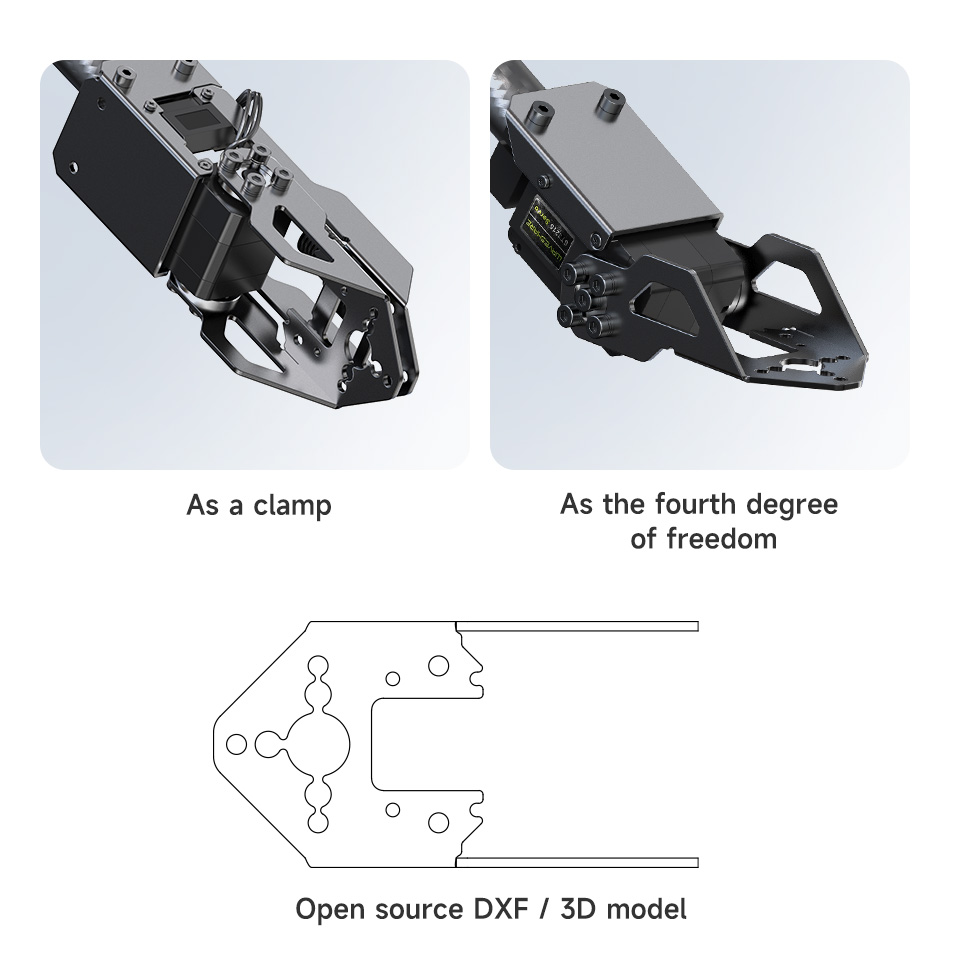
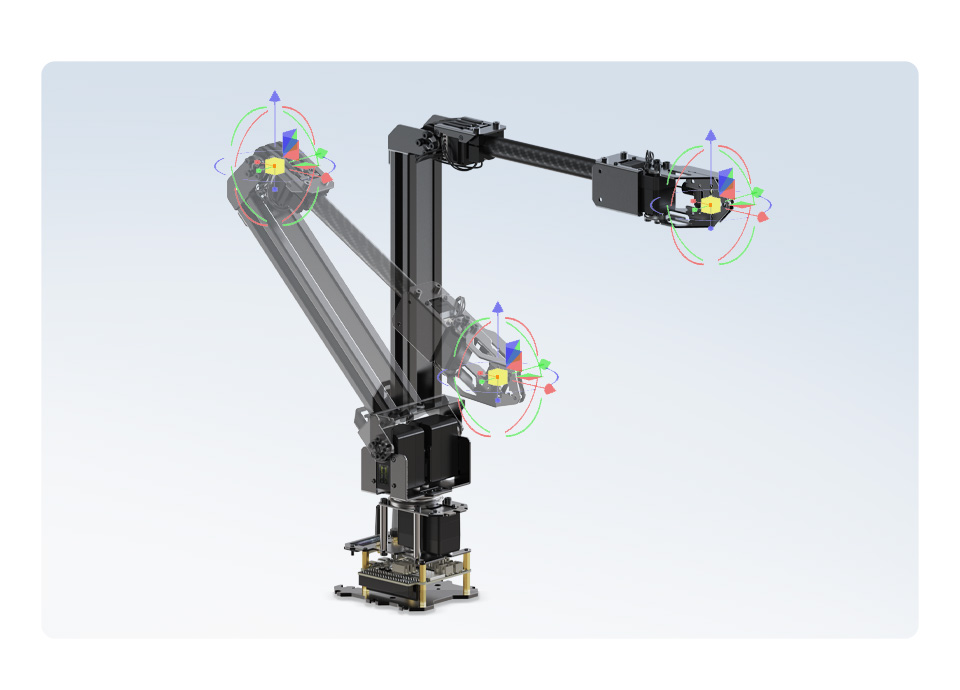
Giunti flessibili × spazio omnidirezionale
Adotta una base rotante a 360° e giunti flessibili per creare uno spazio operativo omnidirezionale con un diametro di 1 metro, permettendo all'EoAT di muoversi liberamente in tutte le direzioni
Facile da controllare tramite
Applicazione Web multipiattaforma
Nessuna installazione di App richiesta, accesso dopo aver inserito l'indirizzo. Permette agli utenti di connettersi e controllare RoArm-M2 tramite telefoni cellulari, tablet e computer cliccando i pulsanti sulla Web App. Supporta lo sviluppo secondario di questa Web App open source per personalizzare l'interfaccia utente e aggiungere nuove funzioni.
Completamente open source per
sviluppo secondario
Codici di controllo e documenti dell'interfaccia di comunicazione della serie Roarm-M2 completamente open source, supporta più lingue e dispositivi per lo sviluppo secondario. Fornisce demo modulari e tutorial per utenti principianti, facile da iniziare.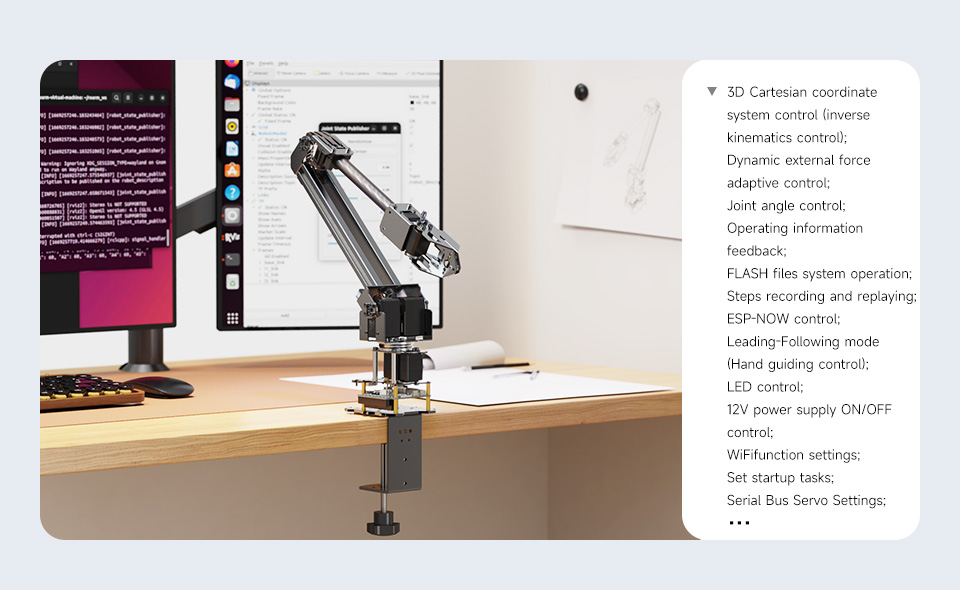
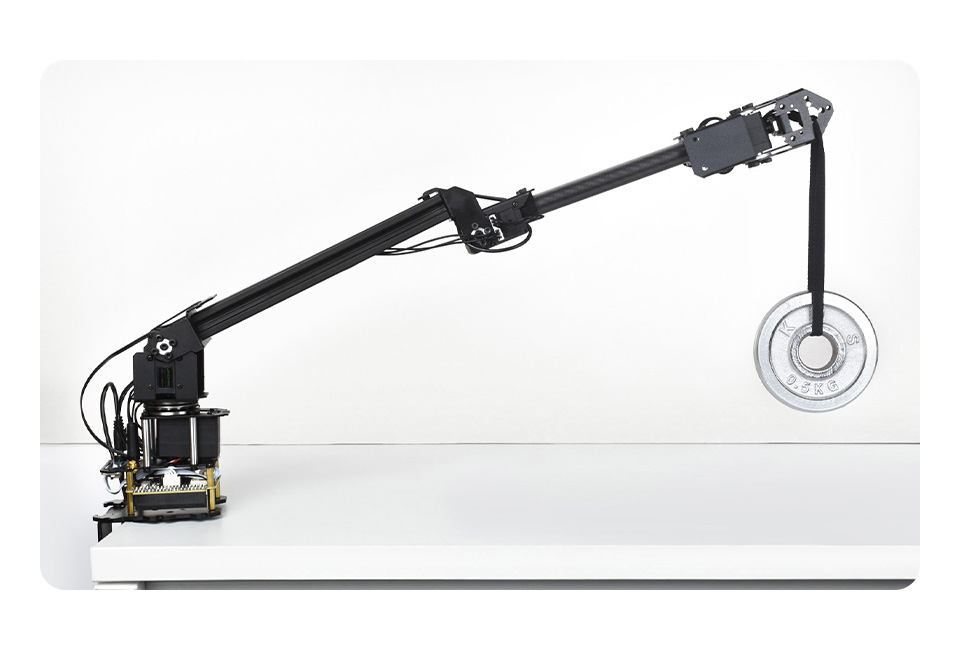
Corpo leggero, eccellente capacità di carico
corpo leggero con un peso totale inferiore a 900g, adotta fibra di carbonio
e lega di alluminio 5052 per garantire stabilità sotto carichi pesanti,
adatto a vari telai di robot mobili

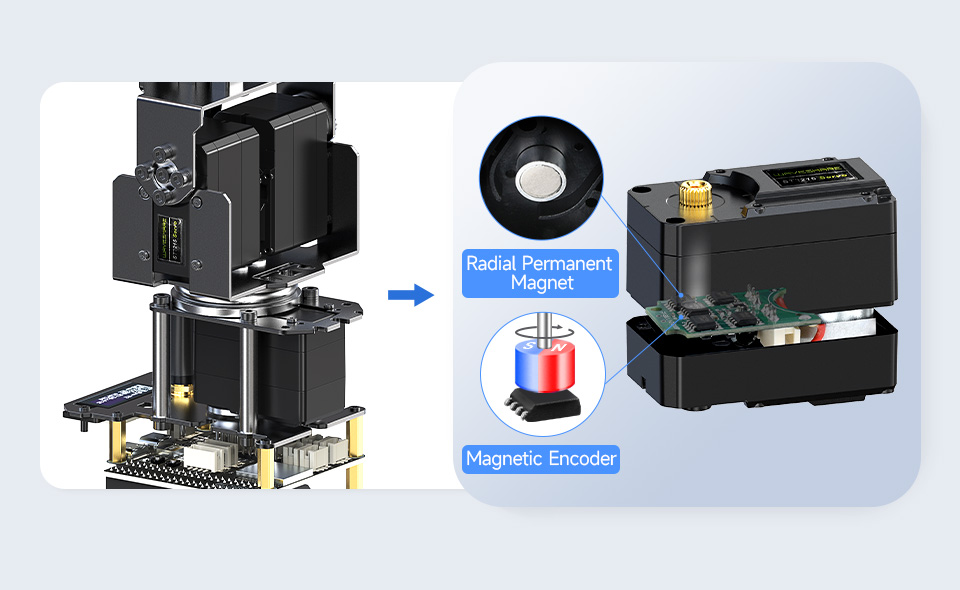
Design a trasmissione diretta dell'articolazione
Precisione del feedback fino a 0,088°
Il feedback dell'angolo dell'articolazione può essere ottenuto direttamente tramite un encoder magnetico ad alta precisione a 12 bit senza alcun gruppo di riduzione, il che è più preciso, e la posizione effettiva del punto target corrente può essere calcolata in base al feedback dell'angolo dell'articolazione.
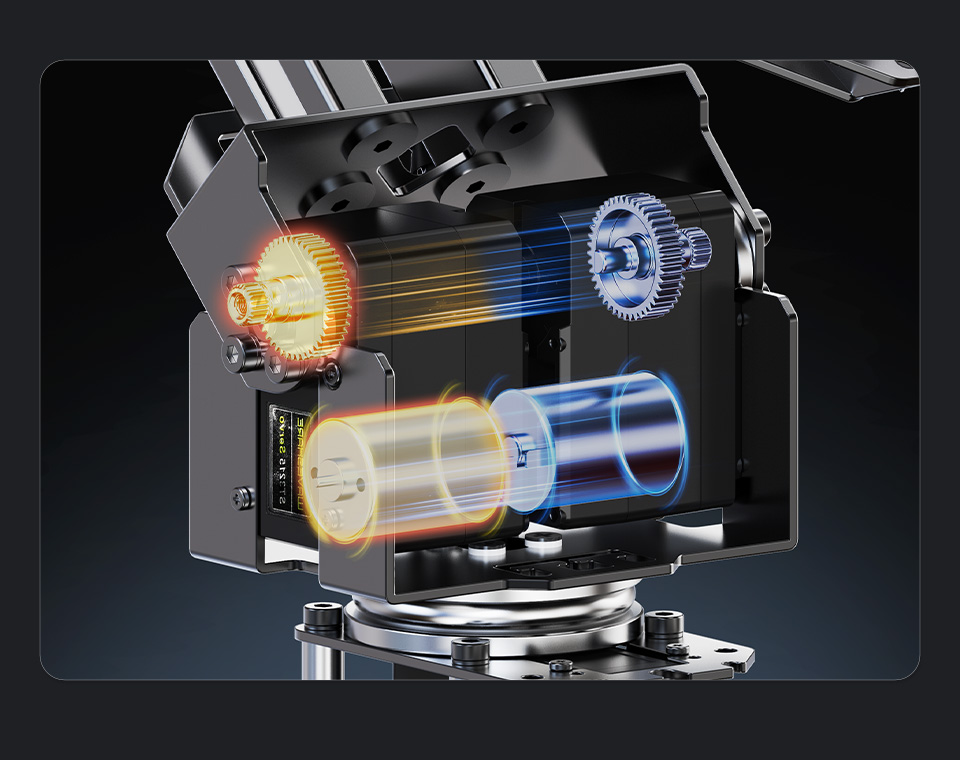
Tecnologia innovativa a doppia trasmissione
raddoppia la coppia del giunto della spalla
Abbiamo sviluppato un algoritmo di controllo a doppia trasmissione che consente ai due servomotori al giunto della spalla di coordinare efficacemente la loro coppia di uscita, migliorando significativamente
la potenza e la capacità di carico complessiva della serie RoArm-M2
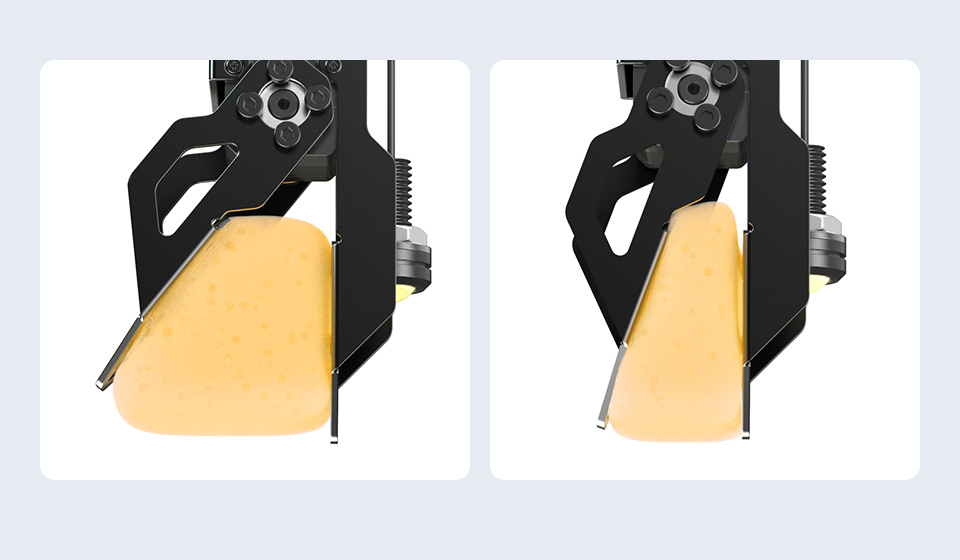
La pinza a trasmissione diretta consente un controllo preciso
controllo della forza
Il design della pinza a trasmissione diretta consente un controllo preciso della forza della pinza nel programma, adatto per afferrare oggetti delicati senza applicare forza eccessiva
Supporta l'installazione di elastici
per compensare l'influenza
della gravità
I giunti SPALLA e GOMITO supportano l'installazione di elastici per assistere il braccio robotico, sfruttando la contrazione elastica degli elastici per compensare l'influenza della gravità e aumentare il carico effettivo del braccio robotico.
Forza esterna dinamica
controllo adattivo
Dopo aver abilitato questa funzione, puoi limitare la coppia massima per ogni giunto. Quando la forza esterna applicata al giunto supera la soglia di coppia (configurabile), il braccio robotico ruoterà in risposta alla forza esterna e tornerà alla posizione specificata quando la forza esterna scende al di sotto della soglia di coppia.

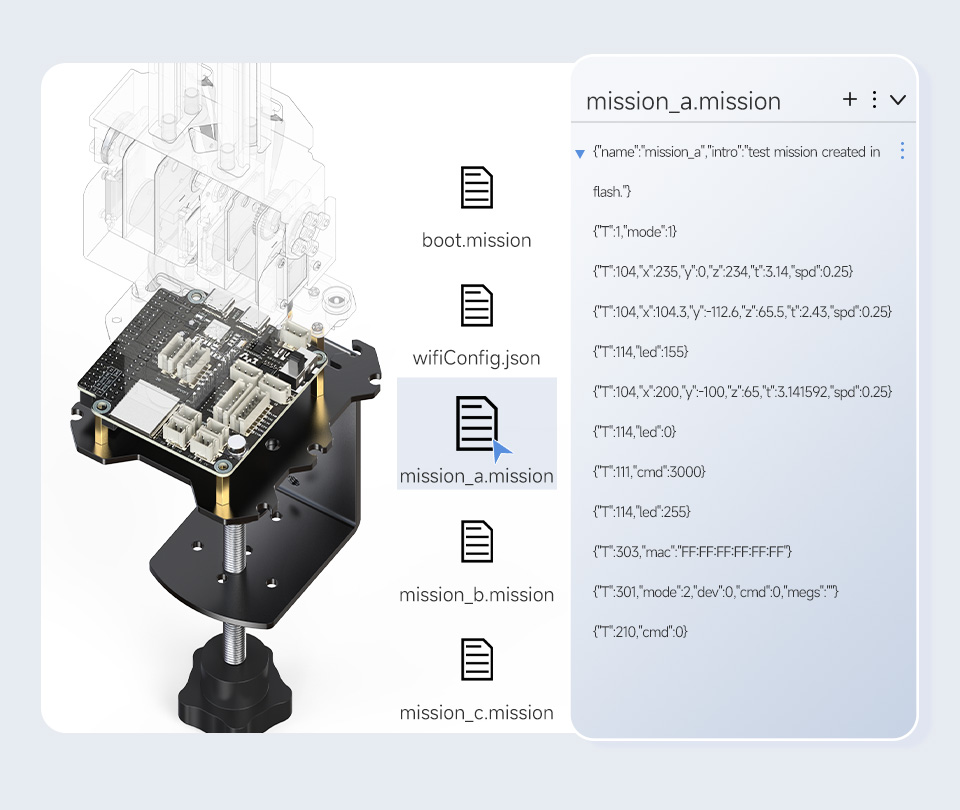
Registrazione automatica con un clic
Facile creare azioni
RoArm-M2 può salvare le istruzioni JSON per il controllo del robot come file di attività. I file di attività possono essere salvati nella Flash dell'ESP32, che non si perderanno in caso di interruzione di corrente. Il braccio robotico può eseguire operazioni complesse e ripetitive richiamando questi file di attività.
Raggiungi con precisione il target inserendo le coordinate
Open source per l'algoritmo di controllo della cinematica inversa nel sistema di coordinate cartesiane tridimensionale. Dopo aver inserito la posizione target, il braccio robotico può raggiungere con precisione il punto target utilizzando la funzione di cinematica inversa per calcolare l'angolo di rotazione di ogni giunto.
Controllo della velocità di curva per
Movimento più fluido
Utilizziamo l'algoritmo di controllo della velocità curva per rendere il movimento del braccio robotico più fluido e naturale, senza oscillazioni durante l'avvio e l'arresto

Controllo wireless ESP-NOW
Collaborazione remota a bassa latenza
ESP-NOW è un protocollo di comunicazione wireless ad hoc a bassa latenza, senza necessità di infrastrutture di rete. Puoi usare un braccio robotico per controllare wireless altri bracci robotici, e i metodi di controllo possono essere impostati come controllo broadcast, controllo di gruppo e controllo uno a uno.
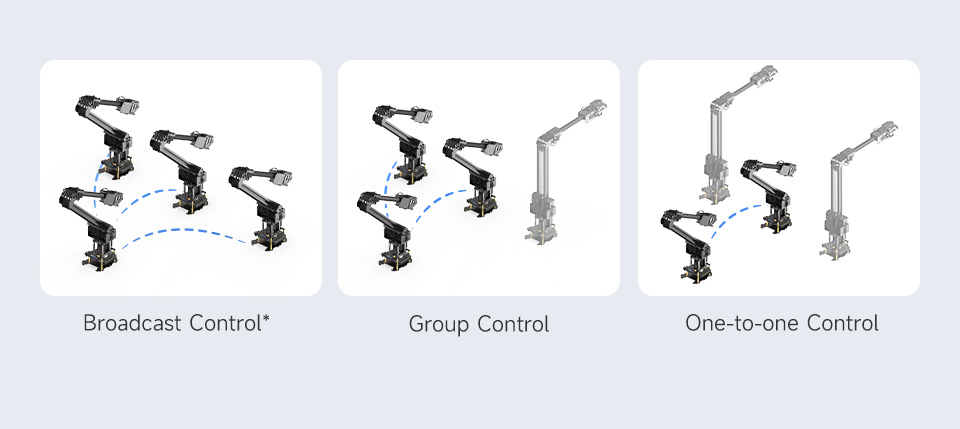
* Nota: Il controllo broadcast non ha limiti sul numero di dispositivi controllati, mentre il controllo di gruppo consente fino a 20 dispositivi. Si prega di fare riferimento alla WIKI per maggiori dettagli.
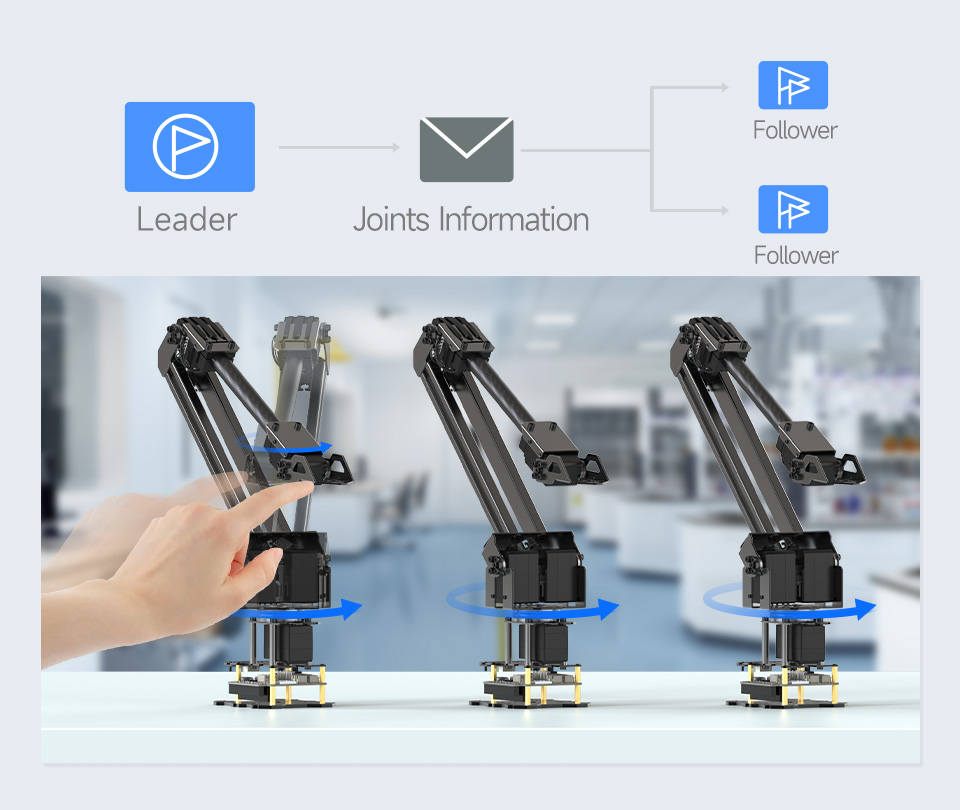
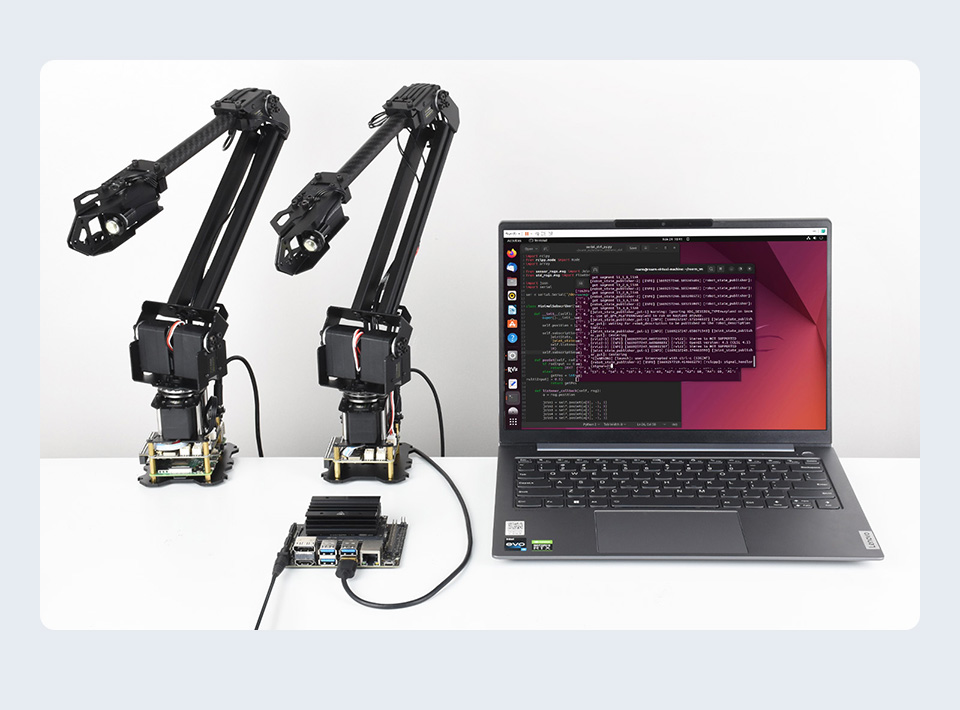
Supporta la modalità di controllo Leader-Follower basata su ESP-NOW
In modalità di controllo Leader-Follower, il braccio robotico Leader invierà le informazioni sull'angolo delle sue articolazioni agli altri bracci robotici tramite comunicazione ESP-NOW. Gli altri bracci robotici in modalità Follower ESP-NOW imiteranno le stesse azioni del Leader in tempo reale.
Molteplici interfacce di controllo,
Supporto per più dispositivi e lingue
La serie RoArm-M2 può essere controllata non solo tramite l'applicazione WEB, ma supporta anche l'uso di altri controller per inviare comandi JSON tramite richieste di rete protocollo HTTP, comunicazione seriale o comunicazione USB per il controllo e l'ottenimento di feedback.
Molteplici metodi di installazione per integrare nella tua applicazione
Fornisce molteplici schemi di installazione e risorse di sviluppo secondario correlate, adatte a diversi scenari d'uso e possono essere integrate in modo flessibile nei tuoi progetti e applicazioni

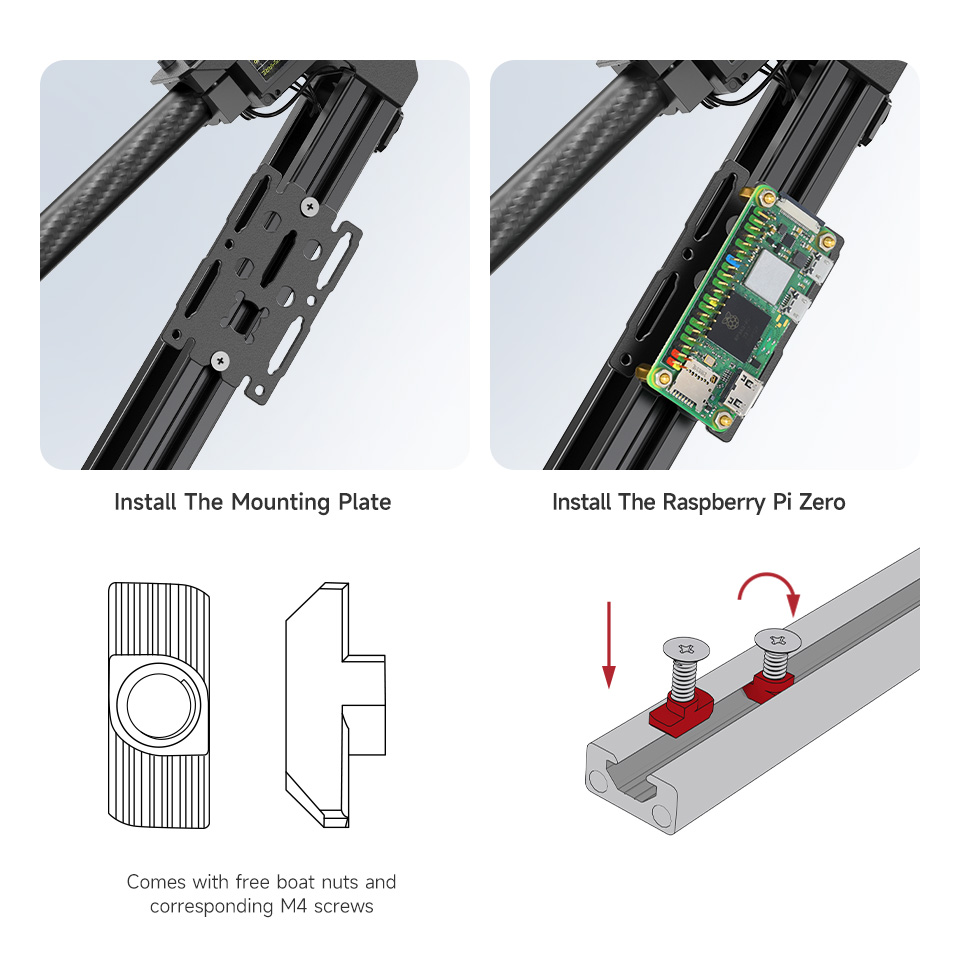
Facile da installare diverse periferiche
La struttura principale del braccio superiore adotta due guide in alluminio standard europeo 1020, supporta l'installazione di periferiche aggiuntive tramite dadi a barca per soddisfare diverse esigenze. Fornito con dadi a barca e viti M4 corrispondenti per un'installazione facile.
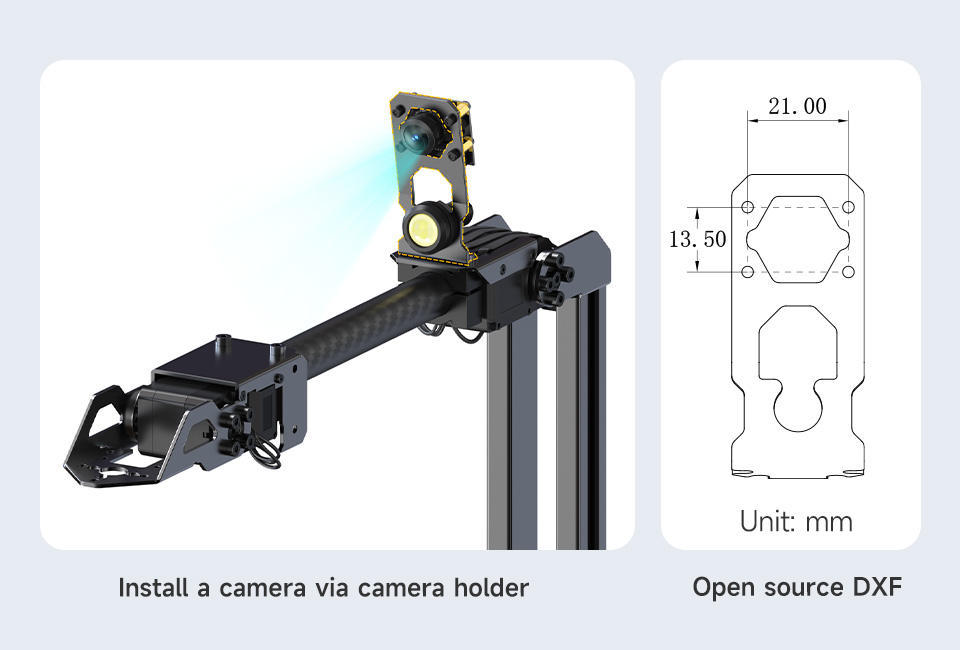
Supporta l'installazione di una telecamera
per estendere le applicazioni visive
Fornito con un supporto per telecamera e open source per i disegni correlati.
Puoi installare direttamente una telecamera della dimensione corrispondente o altre telecamere
con un adattatore
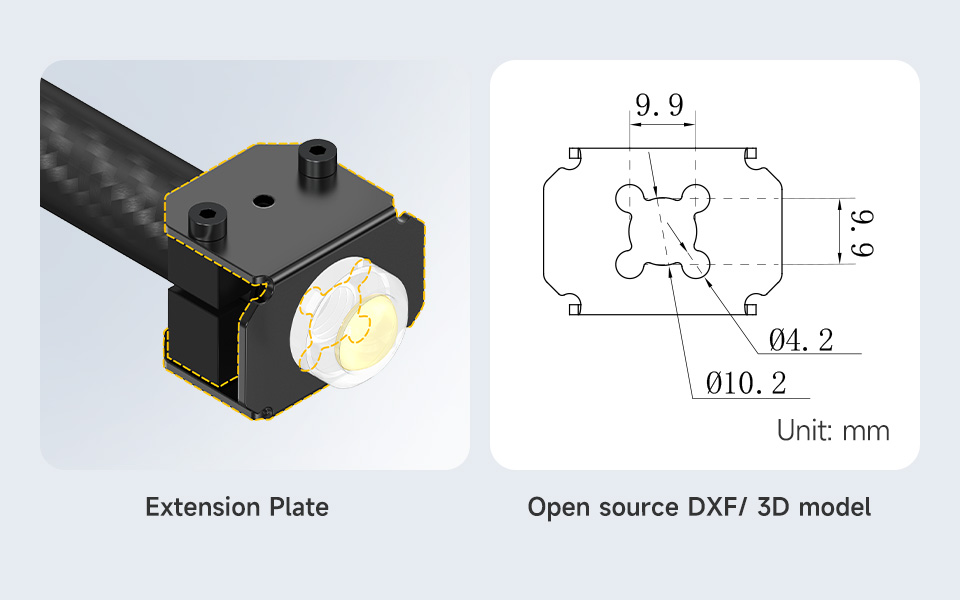
Supporta l'espansione di diversi EoAT
per più funzioni
Viene fornito con una piastra di espansione, facile per gli utenti espandere e sostituire diversi EoAT
per più funzioni
Scheda principale ESP32 a bordo
Adotta MCU principale potente ESP32, supporta molteplici protocolli di comunicazione wireless, con una grande quantità di risorse open source per aiutare lo sviluppo secondario di applicazioni innovative
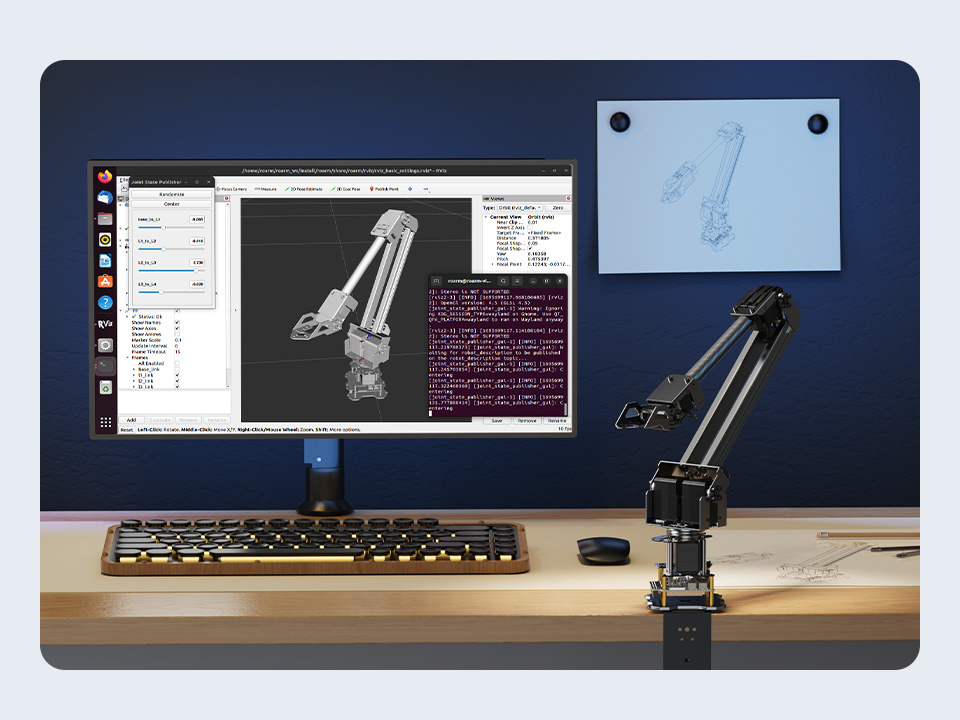
Compatibile con ROS2, fornisce
File di creazione modello e supporta
cooperazione multi-dispositivo
Fornisce nodi di comunicazione di ROS2, file di descrizione modello URDF e tutorial zero-based di ROS2
Risorse tutorial ricche per
sviluppo secondario
Forniamo tutorial completi e casi unitari, inclusi vari funzioni e scenari applicativi comuni, per aiutare gli utenti a iniziare rapidamente lo sviluppo secondario
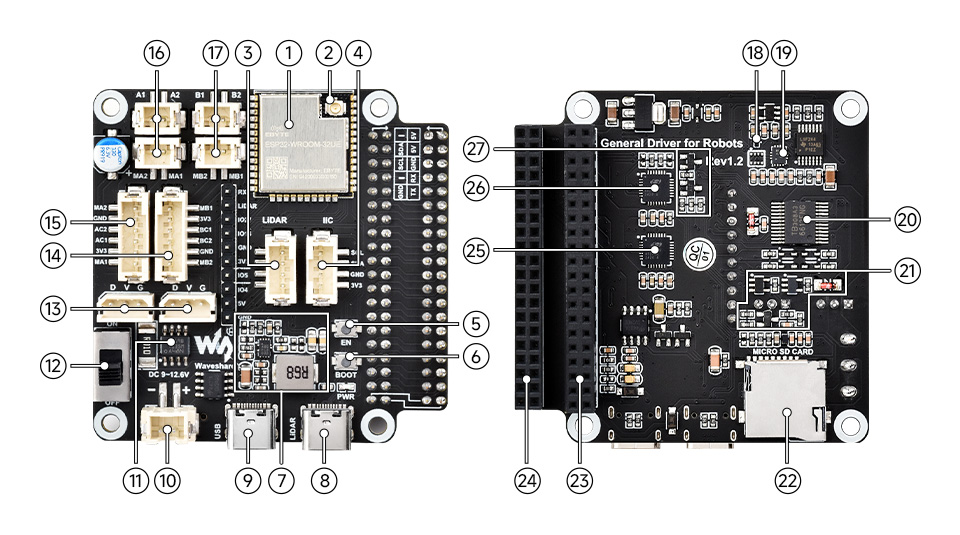
Scheda driver generale per robot
Interfacce e risorse ricche a bordo per sviluppo innovativo ed espansione funzionale
-
Modulo controller ESP32-WROOM-32
Può essere sviluppato utilizzando Arduino IDE -
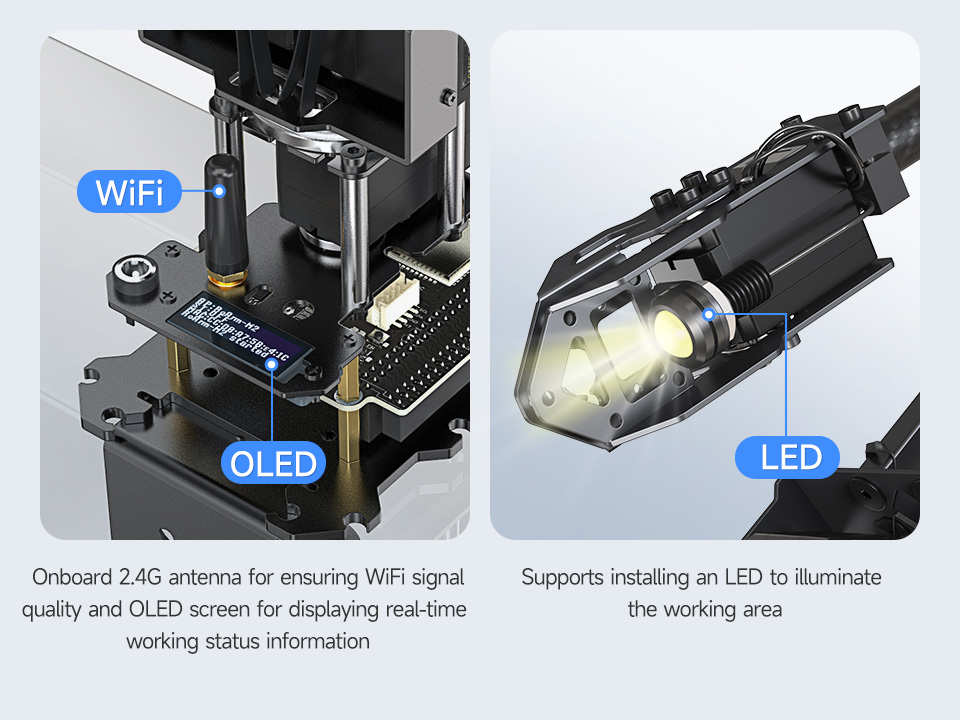
Connettore WIFI IPEX1
Per collegare l'antenna WIFI per aumentare la distanza di comunicazione wireless -
Interfaccia LIDAR
Funzione adattatore radar integrata -
Interfaccia di espansione periferica I2C
Per collegare schermo OLED o altri sensori I2C -
Pulsante di reset
Premere e rilasciare per riavviare l'ESP32 -
Pulsante di download
L'ESP32 entrerà in modalità download dopo l'accensione -
Circuito regolatore di tensione DC-DC 5V
Alimentazione per computer host come Raspberry Pi o Jetson nano -
Porta Type-C (LADAR)
Trasmissione dati LIDAR -
Porta Type-C (USB)
Interfaccia di comunicazione ESP32, per caricare programmi su ESP32 -
Porta di alimentazione XH2.54
Supporta ingresso DC 7~13V, può alimentare direttamente i servo e motori del bus seriale -
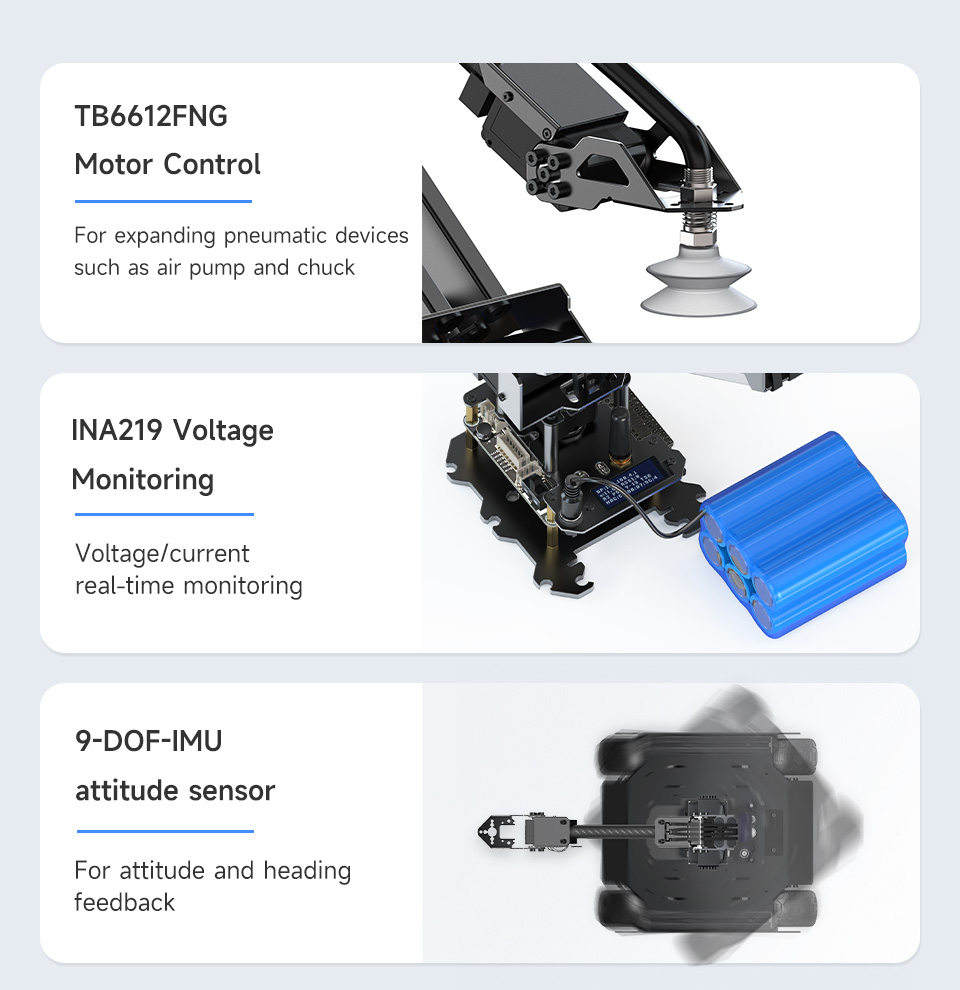
INA219
Chip di monitoraggio tensione/corrente -
Accensione/Spegnimento
Alimentazione esterna ON/OFF -
Interfaccia servo bus seriale ST3215
Per collegare con servo bus seriale ST3215 -
Interfaccia motore PH2.0 6P
Interfaccia Gruppo B per motore con encoder
-
Interfaccia motore PH2.0 6P
Interfaccia Gruppo A per motore con encoder -
Interfaccia motore PH2.0 2P
Interfaccia Gruppo A per motore senza encoder -
Interfaccia motore PH2.0 2P
Interfaccia Gruppo B per motore senza encoder -
AK09918C
Bussola elettronica a 3 assi -
QMI8658C
Sensore di movimento a 6 assi -
TB6612FNG
Chip di controllo motore -
Circuito di controllo servo bus seriale
per controllare più servocomandi seriali ST3215 e ottenere feedback dai servocomandi -
Slot per scheda TF
Può essere usato per memorizzare log o configurazioni WIFI -
Header GPIO a 40 PIN
Per collegamento con Raspberry Pi o altre schede host -
Header esteso a 40 PIN
Facile utilizzo dei pin GPIO di Raspberry Pi o altre schede host -
CP-2102
UART a USB, per trasmissione dati radar -
CP-2102
UART a USB, per comunicazione ESP32 -
Circuito di download automatico
Per caricare programmi sull'ESP32 senza premere i pulsanti EN e BOOT
Risorse di bordo diversificate
Supporta l'espansione delle funzioni
IC di controllo motore integrato TB6612FNG, monitoraggio tensione batteria INA219 e 9 assi
Sensore IMU, supporta espansione e innovazione delle funzioni
Interazione drag-and-drop con il mouse
Fornisce applicazioni Web e software desktop (programmi open-source sviluppati in Python), supporta l'impostazione di istruzioni di azione al clic e rilascio del mouse
per controllare il braccio robotico in modo flessibile

Specifiche
| DOF | 4 |
|---|---|
| Spazio di lavoro | Diametro orizzontale: 1090mm (Max, omnidirezionale 360°), Verticale: 798mm (Max) |
| Tensione operativa | Alimentazione 12V 5A, supporta batterie al litio 3S (NON incluse) |
| Capacità di carico | 0.5kg@0.5m |
| Precisione di riposizionamento | ≈±4mm (con lo stesso carico) |
| Velocità di rotazione del servomotore | 40rpm (a vuoto, senza limite di coppia) |
| Campo operativo | BASE-360°, SPALLA-180°, GOMITO-180°, MANO-135°/270° |
| Tipo di azionamento | Servo bus seriale TTL, articolazione a trasmissione diretta |
| Numero di servi | 5 |
| Sensore angolo articolazione | Encoder magnetico a 12 bit 360° |
| Coppia del servo | 30KG.CM @12V |
| Informazioni di feedback dell'articolazione | stato del servo, angolo dell'articolazione, velocità di rotazione, carico dell'articolazione, tensione del servo, corrente del servo, temperatura del servo e modalità di lavoro del servo |
| Controllo principale | ESP32-WROOM-32 |
| Caratteristiche del modulo di controllo principale | WiFi, BT, Dual Core, 240MHz |
| Modalità di controllo wireless | 2.4G-WiFi, ESP-NOW |
| Modalità di controllo cablato | USB, UART |
| Modalità operativa manuale | Interfaccia di controllo WEB |
| Modalità operativa host | Comunicazione UART/USB/ESP-NOW*/HTTP tramite comandi in formato dati JSON (* non supporta l'ottenimento di informazioni di feedback se si utilizza la comunicazione ESP-NOW) |
| Supporto host | Dispositivi con connessione USB inclusi Raspberry Pi, Jetson Orin Nano e PC. |
| Funzione EoAT | Funzione morsa di default, può essere cambiata come grado di libertà aggiuntivo |
| Potenza LED | ≤1.5W |
| Dimensione schermo OLED | 0.91inch |
| Altre funzioni | Interruttore alimentazione 12V a 2 canali, IMU 9-DOF |
| Peso del braccio robotico | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873.3 ±15g (esclusa la morsa di fissaggio del bordo del tavolo) |
| Peso della morsa di fissaggio del bordo del tavolo | 290g ±10g |
| Spessore del bordo del tavolo supportato dalla morsa | <72mm |
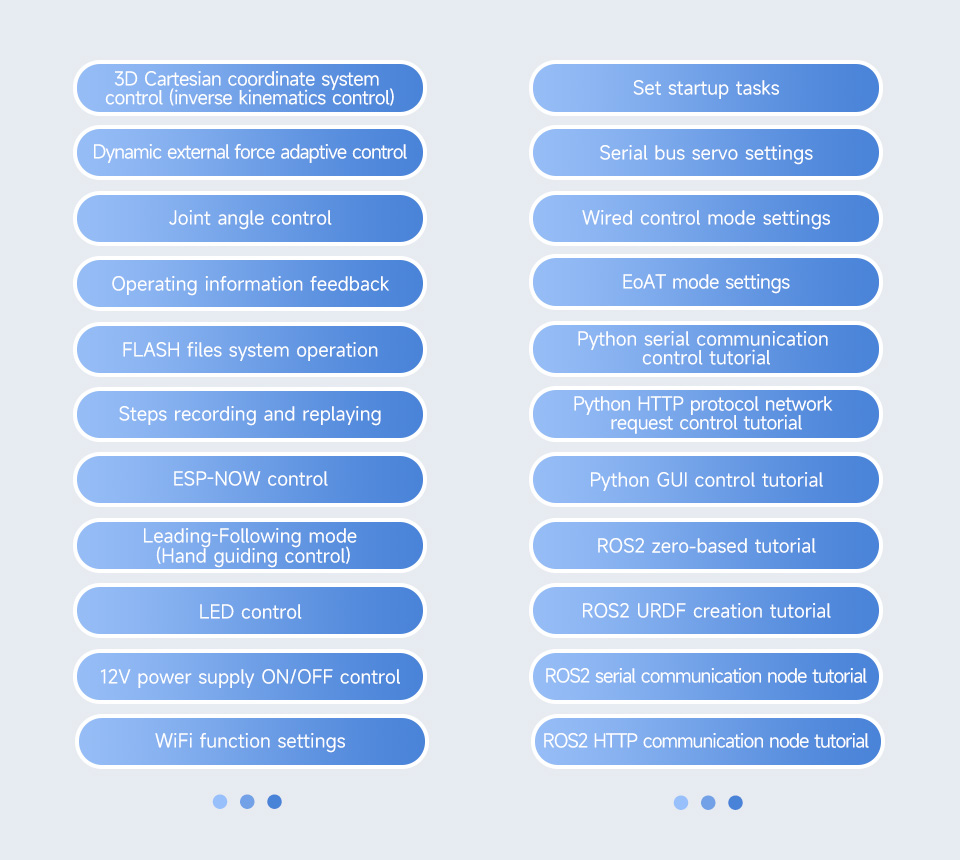
| Demo | Controllo del sistema di coordinate cartesiane 3D (controllo cinematica inversa); Controllo adattivo della forza esterna dinamica; Controllo dell'angolo delle articolazioni; Feedback delle informazioni operative; Operazioni sul sistema di file FLASH; Registrazione e riproduzione dei passaggi; Controllo ESP-NOW; Modalità Leader-Follower (controllo guida a mano); Controllo LED; Controllo ON/OFF alimentazione 12V; Impostazioni funzione WiFi; Impostazione attività di avvio; Impostazioni servo bus seriale; Impostazione modalità feedback; Impostazione modalità EoAT, ecc. (Nota: si prega di fare riferimento al WIKI per maggiori dettagli) |
Mostra prodotto

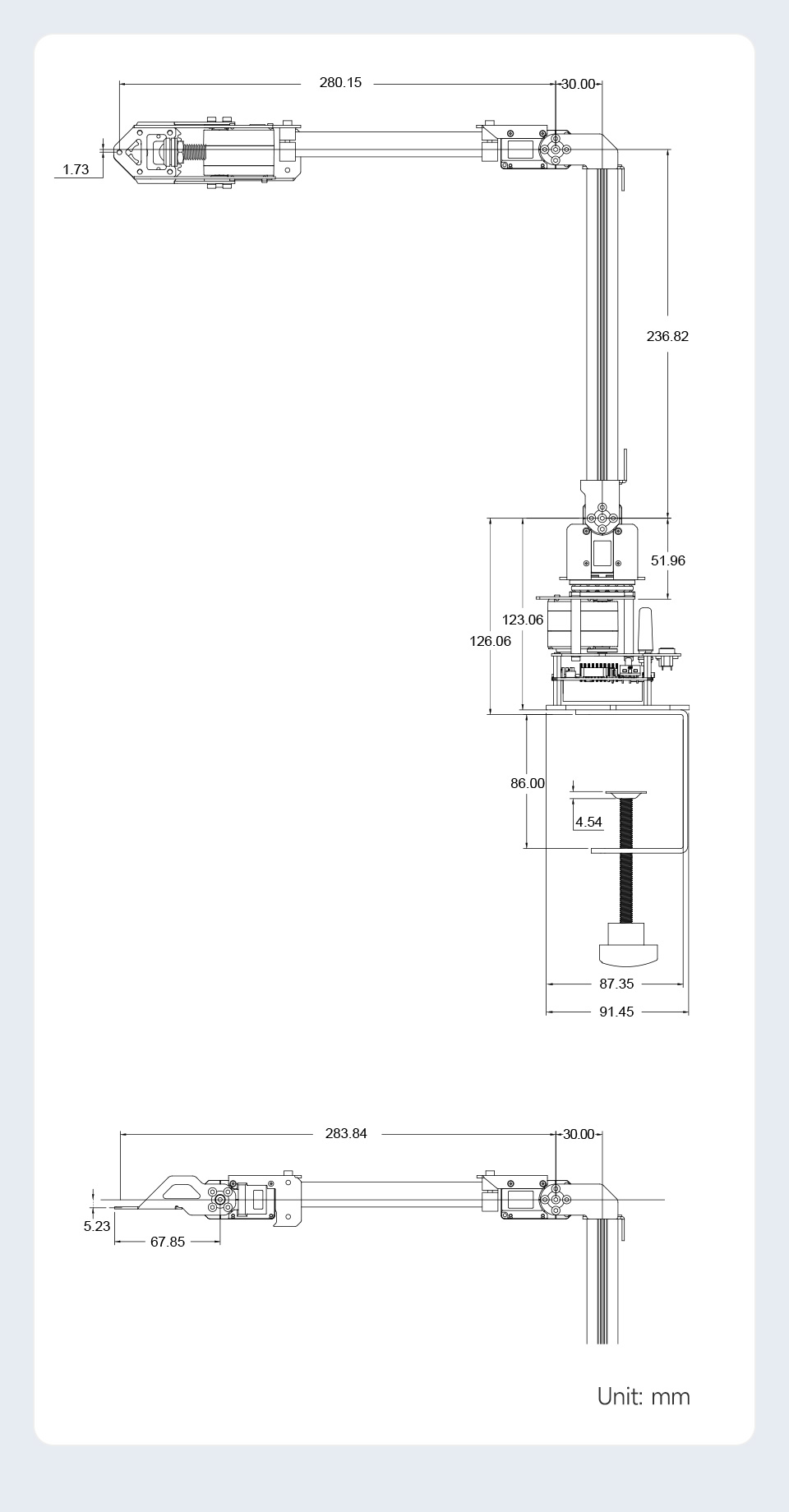
Dimensioni
1. Informazioni generali sulla spedizione
- Forniamo metodi di spedizione premium con un numero di tracciamento per ogni ordine.
-
L'indirizzo di spedizione deve essere inserito in inglese senza simboli speciali per aiutare la compagnia di corriere a riconoscere il tuo indirizzo nel sistema. Spediremo secondo l'indirizzo di spedizione fornito. Si prega di informarci di qualsiasi modifica dell'indirizzo prima che il tuo ordine venga contrassegnato come "Spedito" per evitare la perdita del pacco.
-
Si prega di contattare immediatamente il nostro servizio clienti se è necessario annullare o modificare un ordine. Una volta che il tuo ordine ha raggiunto lo stato "Spedito", non può più essere annullato o modificato in alcun modo. Per evitare complicazioni, si prega di ricontrollare il carrello prima del checkout.
-
Possiamo spedire tutti gli ordini disponibili in magazzino entro 1 giorno lavorativo dalla conferma dell'ordine.
-
Tutti gli articoli sono ispezionati prima della spedizione e sono accuratamente imballati a mano.
-
Con la prassi standard del corriere, è necessario controllare il contenuto del pacco prima di firmare per la merce. Altrimenti, non ci riterremo responsabili per eventuali danni che potrebbero essersi verificati durante il trasporto.
2. Opzioni di spedizione per Germania, paesi UE* e Stati Uniti
(Per prodotti nel magazzino di Monaco, magazzino di Long Beach)
2.1 Ordini con un valore non superiore a €5:
Opzioni di spedizione:
| Opzioni di spedizione | Germania | UE* |
|---|---|---|
|
Deutsche Post |
€6 Arriva in 3-4 giorni lavorativi |
€15 Arriva in 5-9 giorni lavorativi |
| Opzioni di spedizione | Stati Uniti continentali | Stati Uniti non continentali |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Arriva in 3-7 giorni lavorativi |
€8.95 Arriva in 5-9 giorni lavorativi |
|
UPS Express |
€13.95 Arriva in 2-4 giorni lavorativi |
€17.95 Arriva in 3-7 giorni lavorativi |
2.2 Opzioni di spedizione per un valore dell'ordine tra €5 e €30 in Germania, €5 e €50 nell'UE, o €5 e €45 negli Stati Uniti:*
Opzioni di spedizione:
| Opzioni di spedizione | Germania | UE* |
|---|---|---|
|
Deutsche Post |
€3.5 Arriva in 3-4 giorni lavorativi |
€6 Arriva in 5-9 giorni lavorativi |
|
DHL Paket |
€6 Arriva in 2-3 giorni lavorativi |
€15 Arriva in 3-7 giorni lavorativi |
|
DHL Express |
€14 Arriva in 1-2 giorni lavorativi |
€65 Arriva in 2-3 giorni lavorativi |
| Opzioni di spedizione | Stati Uniti continentali | Stati Uniti non continentali |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Arriva in 3-7 giorni lavorativi |
€6.95 Arriva in 5-9 giorni lavorativi |
|
UPS Express |
€11.95 Arriva in 2-4 giorni lavorativi |
€13.95 Arriva in 3-7 giorni lavorativi |
2.3 Opzioni di spedizione gratuite per un valore dell'ordine superiore a €30 in Germania, €50 nell'UE* o €45 negli Stati Uniti :
| Opzioni di spedizione gratuita | Germania | UE* |
|---|---|---|
|
Deutsche Post |
Gratuito oltre €30 | Gratuito oltre €50 |
|
DHL Paket |
+ €2 per oltre €30 / Gratuito oltre €60 | + €8 per oltre €50 / Gratuito oltre €80 |
|
DHL Express |
+ €10 per oltre €30 | + €60 per oltre €50 |
| Opzioni di spedizione gratuita | Stati Uniti continentali | Stati Uniti non continentali |
|---|---|---|
|
USPS Ground Advantage |
Gratuito oltre €45 | Gratuito oltre €60 |
|
UPS Express |
+ € 8,95 per oltre €45 | + € 11,95 per oltre €45 |
-
Alcuni paesi dell'UE non sono inclusi nella nostra definizione della zona UE: Regno Unito (esclusa l'Irlanda), Svizzera, Liechtenstein, Città del Vaticano, Albania, Bielorussia, Norvegia, Ucraina e Islanda. Per i paesi sopra indicati, si applica la Regola di spedizione internazionale.
- Le regioni in Stati Uniti non continentali includono: Alaska, Samoa Americane, Guam, Hawaii, il Isole Marshall, il Isole Marianne Settentrionali, Palau, Porto Rico, il Isole Vergini americane, il Forze armate americane, il Forze armate in Europa, il Forze armate nel Pacifico, e il Isole periferiche degli Stati Uniti. La spedizione e la consegna in queste aree sono soggette a Regole di spedizione per gli Stati Uniti non continentali.
2.4 Opzioni di spedizione per paesi internazionali:
(tramite Deutsche Post o YunExpress)
| Importo dell'ordine | Internazionale |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| €50 e oltre | €4 |
Avviso importante:
- Si prega di verificare la posizione dell'inventario nella pagina del prodotto prima di effettuare l'ordine per confermare i tempi di consegna.
- FPer i prodotti nel magazzino di Shenzhen, di solito spediamo prima i prodotti dal magazzino di Shenzhen al nostro magazzino di Monaco o al magazzino di Long Beach, il che richiede circa 1,5 settimane. Dopo aver ricevuto la spedizione a Monaco/Long Beach, ti invieremo gli articoli. Organizzeremo la spedizione YunExpress da Shenzhen solo per ordini con prodotti nel magazzino di Shenzhen per un valore superiore a €50.
- Se se effettui un ordine con prodotti provenienti sia dal magazzino di Monaco che da quello di Shenzhen, spediremo prima i prodotti dal magazzino di Monaco e poi ti invieremo i prodotti rimanenti non appena li riceveremo da Shenzhen.
3. Magazzino internazionale
3.1 Magazzino tedesco
3.2 Magazzino USA
3.3 Magazzino cinese
4. Dogane e Tasse
4.1 Come gestisce OpenELAB le dogane per l'importazione o l'esportazione?
4.2 Come viene addebitata l'IVA quando il Cliente effettua un ordine da OpenELAB?
4.3 Che tipo di spese verranno addebitate oltre all'IVA?
Data di Entrata in Vigore: 7 agosto 2025
In OpenELAB, ci impegniamo a fornire descrizioni accurate dei prodotti e a consegnare prodotti di alta qualità. Se riscontri problemi con il tuo acquisto, ti preghiamo di informarci entro 30 giorni dalla data di spedizione.
1. Esclusione di Garanzia
Salvo quanto esplicitamente indicato in un accordo specifico o ordine di acquisto, OpenELAB non fornisce garanzie—espresse o implicite—riguardo all'idoneità, adeguatezza o commerciabilità di qualsiasi prodotto per uno scopo particolare o uso speciale.
2. Politica di Garanzia
Periodo di garanzia
Il periodo di garanzia standard per i prodotti venduti da OpenELAB è di 12 mesi dalla data di consegna.
In base a questa garanzia, OpenELAB farà uno sforzo ragionevole per riparare o sostituire i prodotti senza alcun costo se i difetti sono dovuti a problemi con materie prime, progettazione o produzione.
Se il difetto rientra in questa politica ma è fuori dall'ambito coperto, potrebbero essere applicati costi ragionevoli per la riparazione o la sostituzione.
Dopo il periodo di garanzia, il supporto potrebbe essere ancora disponibile a un costo ragionevole.
Esclusioni della Garanzia
La garanzia non si applica nei seguenti casi:
- Il prodotto è oltre il periodo di garanzia di 12 mesi.
- Danni dovuti a uso improprio, manutenzione o conservazione inadeguata, o mancato rispetto della guida o manuale d'uso.
- Problemi causati da eventi di Forza Maggiore (ad esempio, disastri naturali, guerra, cambiamenti legali, ecc.).
- Tentativi di riparazione non autorizzati da parte del cliente.
- Il prodotto non è difettoso ma è stato aperto ed è non restituibile secondo la politica.
3. Resi e Rimborsi
Se non sei soddisfatto del tuo acquisto, potresti avere diritto a un reso o a una sostituzione:
- Reso per rimborso: Entro 15 giorni dalla ricezione (non aperto).
- Reso per sostituzione: Entro 30 giorni dalla ricezione (danneggiato o difettoso).
- Finestra di cambio: Fino a 30 giorni dalla ricezione.
Per favore scrivici una email a info@openelab.io per un'autorizzazione al reso prima di inviare qualsiasi cosa indietro.
Condizioni di reso
- Gli articoli devono essere nelle condizioni originali, pulite e perfette con l'imballaggio intatto.
- Non saranno accettati resi di articoli danneggiati, usati, graffiati, modificati o programmati.
- Includere la ricevuta, una breve nota con il tuo nome, numero d'ordine e motivo del reso.
Spedizione e commissioni
- I clienti sono responsabili della spedizione di ritorno ai nostri magazzini in Europa, negli Stati Uniti o in Cina.
- Se un reso è richiesto per motivi del cliente (ad esempio, ripensamento, ordine errato, ecc.), sia il costo di spedizione originale che il costo di spedizione per il reso verranno detratti dall'importo del rimborso.
- Per i resi dovuti a motivi del cliente, genereremo e forniremo un'etichetta di spedizione per il reso.
Commissioni della piattaforma di pagamento
Per tutti i rimborsi richiesti per motivi del cliente, verrà detratta dal rimborso una commissione di servizio standard, addebitata dalle piattaforme di pagamento. Le commissioni specifiche sono le seguenti:
Shopify Payments: 1,8% + €0,3
PayPal: 4,4%
