












































































































Mateksys GNSS M9N-5883
Pre-order
Spedizione gratuita da 30€ in Germania, 50€ nell'UE!
- I preordini saranno spediti entro 5 giorni lavorativi.
- Tempi di consegna per paesi UE e USA: 10 giorni lavorativi.
- Tempi di consegna per altri paesi: 15 giorni lavorativi.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Mateksys GNSS M9N-5883
Specifiche





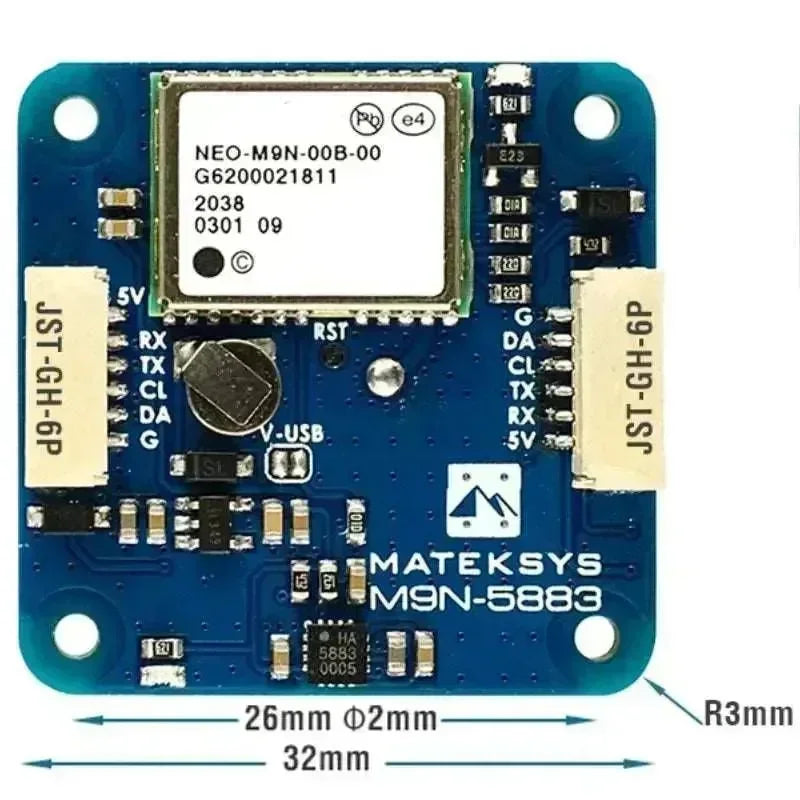
M9N-5883 utilizza GNSS multi-costellazione alimentato da NEO-M9N, NEO-M9N è un ricevitore GNSS simultaneo che può ricevere e tracciare più sistemi GNSS. Grazie all'architettura front-end RF multi-banda è possibile ricevere contemporaneamente tutte e quattro le principali costellazioni GNSS, GPS, Galileo, GLONASS e BeiDou.
Specifiche
-
GNSS NEO-M9N (GPS, GLONASS, Galileo e BeiDou)
-
Bussola magnetica QMC5883L
-
Antenna a toppa 25*25*4mm
-
Intervallo di tensione in ingresso: 4~5,5 V (pad/pin 5 V)
-
Consumo energetico: 50mA
-
Baudrate UART: 38400 predefinito
-
Temperature di funzionamento: -20~80 °C
-
Interfaccia UART (TX, RX) per GNSS NEO-M9N
-
Interfaccia I2C(DA, CL) per bussola QMC5883L
-
Connettore JST-GH-6P
-
LED di alimentazione 3,3 V, rosso
-
LED GNSS PPS, verde, lampeggiante (1 Hz) quando GNSS ha il 3D fisso
-
32mm*32mm*10mm
-
14.5g
Include
-
1xM9N-5883
-
1x cavo in silicone da JST-GH-6P a JST-GH-6P da 20 cm
Cablaggio e impostazioni
-
M9N-5883 Da 5 V al controllore di volo 4~5,5 V
-
M9N-5883 RX al controllore di volo UART_TX
-
M9N-5883 TX al controllore di volo UART_RX
-
M9N-5883 CL al controllore di volo I2C_SCL
-
M9N-5883 DA al controllore di volo I2C_SDA
-
M9N-5883 G alla massa del controller di volo
Suggerimenti e note
-
Allineamento della bussola (montaggio piatto): inclinare il magnetometro è fortemente sconsigliato!
-
INAV/BetaFLight: freccia della bussola in avanti, imposta CW 270° Capovolgi quando la freccia del controllore di volo è rivolta in avanti.
-
INAV/BetaFLight: freccia della bussola all'indietro, imposta CW 90° Capovolgi quando la freccia del controllore di volo è rivolta in avanti.
-
Ardupilot/Mission Planner: rotazione nessuna.
-
Assicurarsi di avere bussola/magnetometro a 10 cm di distanza da linee elettriche/ESC/motori/materiale a base di ferro
-
È richiesto INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 o versione successiva.
-
Tutte le serie NEO-M9N, MAX-M10S e SAM-M10Q non dispongono di dataflash integrato. una volta che il GNSS viene spento e il supercondensatore si esaurisce. le impostazioni torneranno ai valori predefiniti.
-
Il protocollo UBX è bidirezionale. Il firmware del controllore di volo può modificare le impostazioni sul GPS tramite il protocollo UBX. Non è necessario impostare i parametri del modulo GNSS in u-center.
-
A partire da GNSS FW3.01, timepulse è allineato con l'ora UTC e l'ora viene impostata come valida solo dopo il download del secondo intercalare. Potrebbero essere necessari fino a 12,5 minuti. Probabilmente il LED PPS non lampeggerà immediatamente dopo che il GPS avrà corretto il 3D.
-
L'M9N-5883 offre la possibilità di ripristinare il ricevitore. Collegando il pad "RST" a terra per almeno 100 ms si attiverà un avvio a freddo. RESET cancellerà tutte le informazioni e attiverà un avvio a freddo. Dovrebbe essere utilizzato solo come opzione di ripristino. Se sei sicuro che il cablaggio e la configurazione siano a posto. ma il controllore di volo non riesce a rilevare il modulo GNSS (icona GPS grigia), prova a eseguire il ripristino.
-
I graffi sull'antenna in ceramica sono il risultato della sintonizzazione dell'antenna.
-
Risoluzione dei problemi relativi al GPS: https://www.mateksys.com/?p=5712#tab-id-6
1. Informazioni generali sulla spedizione
- Forniamo metodi di spedizione premium con un numero di tracciamento per ogni ordine.
-
L'indirizzo di spedizione deve essere inserito in inglese senza simboli speciali per aiutare la compagnia di corriere a riconoscere il tuo indirizzo nel sistema. Spediremo secondo l'indirizzo di spedizione fornito. Si prega di informarci di qualsiasi modifica dell'indirizzo prima che il tuo ordine venga contrassegnato come "Spedito" per evitare la perdita del pacco.
-
Si prega di contattare immediatamente il nostro servizio clienti se è necessario annullare o modificare un ordine. Una volta che il tuo ordine ha raggiunto lo stato "Spedito", non può più essere annullato o modificato in alcun modo. Per evitare complicazioni, si prega di ricontrollare il carrello prima del checkout.
-
Possiamo spedire tutti gli ordini disponibili in magazzino entro 1 giorno lavorativo dalla conferma dell'ordine.
-
Tutti gli articoli sono ispezionati prima della spedizione e sono accuratamente imballati a mano.
-
Con la prassi standard del corriere, è necessario controllare il contenuto del pacco prima di firmare per la merce. Altrimenti, non ci riterremo responsabili per eventuali danni che potrebbero essersi verificati durante il trasporto.
2. Opzioni di spedizione per Germania, paesi UE* e Stati Uniti
(Per prodotti nel magazzino di Monaco, magazzino di Long Beach)
2.1 Ordini con un valore non superiore a €5:
Opzioni di spedizione:
| Opzioni di spedizione | Germania | UE* |
|---|---|---|
|
Deutsche Post |
€6 Arriva in 3-4 giorni lavorativi |
€15 Arriva in 5-9 giorni lavorativi |
| Opzioni di spedizione | Stati Uniti continentali | Stati Uniti non continentali |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Arriva in 3-7 giorni lavorativi |
€8.95 Arriva in 5-9 giorni lavorativi |
|
UPS Express |
€13.95 Arriva in 2-4 giorni lavorativi |
€17.95 Arriva in 3-7 giorni lavorativi |
2.2 Opzioni di spedizione per un valore dell'ordine tra €5 e €30 in Germania, €5 e €50 nell'UE, o €5 e €45 negli Stati Uniti:*
Opzioni di spedizione:
| Opzioni di spedizione | Germania | UE* |
|---|---|---|
|
Deutsche Post |
€3.5 Arriva in 3-4 giorni lavorativi |
€6 Arriva in 5-9 giorni lavorativi |
|
DHL Paket |
€6 Arriva in 2-3 giorni lavorativi |
€15 Arriva in 3-7 giorni lavorativi |
|
DHL Express |
€14 Arriva in 1-2 giorni lavorativi |
€65 Arriva in 2-3 giorni lavorativi |
| Opzioni di spedizione | Stati Uniti continentali | Stati Uniti non continentali |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Arriva in 3-7 giorni lavorativi |
€6.95 Arriva in 5-9 giorni lavorativi |
|
UPS Express |
€11.95 Arriva in 2-4 giorni lavorativi |
€13.95 Arriva in 3-7 giorni lavorativi |
2.3 Opzioni di spedizione gratuite per un valore dell'ordine superiore a €30 in Germania, €50 nell'UE* o €45 negli Stati Uniti :
| Opzioni di spedizione gratuita | Germania | UE* |
|---|---|---|
|
Deutsche Post |
Gratuito oltre €30 | Gratuito oltre €50 |
|
DHL Paket |
+ €2 per oltre €30 / Gratuito oltre €60 | + €8 per oltre €50 / Gratuito oltre €80 |
|
DHL Express |
+ €10 per oltre €30 | + €60 per oltre €50 |
| Opzioni di spedizione gratuita | Stati Uniti continentali | Stati Uniti non continentali |
|---|---|---|
|
USPS Ground Advantage |
Gratuito oltre €45 | Gratuito oltre €60 |
|
UPS Express |
+ € 8,95 per oltre €45 | + € 11,95 per oltre €45 |
-
Alcuni paesi dell'UE non sono inclusi nella nostra definizione della zona UE: Regno Unito (esclusa l'Irlanda), Svizzera, Liechtenstein, Città del Vaticano, Albania, Bielorussia, Norvegia, Ucraina e Islanda. Per i paesi sopra indicati, si applica la Regola di spedizione internazionale.
- Le regioni in Stati Uniti non continentali includono: Alaska, Samoa Americane, Guam, Hawaii, il Isole Marshall, il Isole Marianne Settentrionali, Palau, Porto Rico, il Isole Vergini americane, il Forze armate americane, il Forze armate in Europa, il Forze armate nel Pacifico, e il Isole periferiche degli Stati Uniti. La spedizione e la consegna in queste aree sono soggette a Regole di spedizione per gli Stati Uniti non continentali.
2.4 Opzioni di spedizione per paesi internazionali:
(tramite Deutsche Post o YunExpress)
| Importo dell'ordine | Internazionale |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| €50 e oltre | €4 |
Avviso importante:
- Si prega di verificare la posizione dell'inventario nella pagina del prodotto prima di effettuare l'ordine per confermare i tempi di consegna.
- FPer i prodotti nel magazzino di Shenzhen, di solito spediamo prima i prodotti dal magazzino di Shenzhen al nostro magazzino di Monaco o al magazzino di Long Beach, il che richiede circa 1,5 settimane. Dopo aver ricevuto la spedizione a Monaco/Long Beach, ti invieremo gli articoli. Organizzeremo la spedizione YunExpress da Shenzhen solo per ordini con prodotti nel magazzino di Shenzhen per un valore superiore a €50.
- Se se effettui un ordine con prodotti provenienti sia dal magazzino di Monaco che da quello di Shenzhen, spediremo prima i prodotti dal magazzino di Monaco e poi ti invieremo i prodotti rimanenti non appena li riceveremo da Shenzhen.
3. Magazzino internazionale
3.1 Magazzino tedesco
3.2 Magazzino USA
3.3 Magazzino cinese
4. Dogane e Tasse
4.1 Come gestisce OpenELAB le dogane per l'importazione o l'esportazione?
4.2 Come viene addebitata l'IVA quando il Cliente effettua un ordine da OpenELAB?
4.3 Che tipo di spese verranno addebitate oltre all'IVA?
Data di Entrata in Vigore: 7 agosto 2025
In OpenELAB, ci impegniamo a fornire descrizioni accurate dei prodotti e a consegnare prodotti di alta qualità. Se riscontri problemi con il tuo acquisto, ti preghiamo di informarci entro 30 giorni dalla data di spedizione.
1. Esclusione di Garanzia
Salvo quanto esplicitamente indicato in un accordo specifico o ordine di acquisto, OpenELAB non fornisce garanzie—espresse o implicite—riguardo all'idoneità, adeguatezza o commerciabilità di qualsiasi prodotto per uno scopo particolare o uso speciale.
2. Politica di Garanzia
Periodo di garanzia
Il periodo di garanzia standard per i prodotti venduti da OpenELAB è di 12 mesi dalla data di consegna.
In base a questa garanzia, OpenELAB farà uno sforzo ragionevole per riparare o sostituire i prodotti senza alcun costo se i difetti sono dovuti a problemi con materie prime, progettazione o produzione.
Se il difetto rientra in questa politica ma è fuori dall'ambito coperto, potrebbero essere applicati costi ragionevoli per la riparazione o la sostituzione.
Dopo il periodo di garanzia, il supporto potrebbe essere ancora disponibile a un costo ragionevole.
Esclusioni della Garanzia
La garanzia non si applica nei seguenti casi:
- Il prodotto è oltre il periodo di garanzia di 12 mesi.
- Danni dovuti a uso improprio, manutenzione o conservazione inadeguata, o mancato rispetto della guida o manuale d'uso.
- Problemi causati da eventi di Forza Maggiore (ad esempio, disastri naturali, guerra, cambiamenti legali, ecc.).
- Tentativi di riparazione non autorizzati da parte del cliente.
- Il prodotto non è difettoso ma è stato aperto ed è non restituibile secondo la politica.
3. Resi e Rimborsi
Se non sei soddisfatto del tuo acquisto, potresti avere diritto a un reso o a una sostituzione:
- Reso per rimborso: Entro 15 giorni dalla ricezione (non aperto).
- Reso per sostituzione: Entro 30 giorni dalla ricezione (danneggiato o difettoso).
- Finestra di cambio: Fino a 30 giorni dalla ricezione.
Per favore scrivici una email a info@openelab.io per un'autorizzazione al reso prima di inviare qualsiasi cosa indietro.
Condizioni di reso
- Gli articoli devono essere nelle condizioni originali, pulite e perfette con l'imballaggio intatto.
- Non saranno accettati resi di articoli danneggiati, usati, graffiati, modificati o programmati.
- Includere la ricevuta, una breve nota con il tuo nome, numero d'ordine e motivo del reso.
Spedizione e commissioni
- I clienti sono responsabili della spedizione di ritorno ai nostri magazzini in Europa, negli Stati Uniti o in Cina.
- Se un reso è richiesto per motivi del cliente (ad esempio, ripensamento, ordine errato, ecc.), sia il costo di spedizione originale che il costo di spedizione per il reso verranno detratti dall'importo del rimborso.
- Per i resi dovuti a motivi del cliente, genereremo e forniremo un'etichetta di spedizione per il reso.
Commissioni della piattaforma di pagamento
Per tutti i rimborsi richiesti per motivi del cliente, verrà detratta dal rimborso una commissione di servizio standard, addebitata dalle piattaforme di pagamento. Le commissioni specifiche sono le seguenti:
Shopify Payments: 1,8% + €0,3
PayPal: 4,4%
