 openelab.de
openelab.de
 openelab.com
openelab.com












































































































Waveshare 5+1 DOF wysokoprężny serwomechanizm szeregowej magistrali zestaw ramienia robota
Shipping within 72 hours
*Excluding pre-order items
- • Dostawa do UE i USA: 10 dni roboczych
- • Inne kraje: 15 dni roboczych
Potrzebujesz szybciej? Skontaktuj się z nami przez telefon lub e-mail w celu przyspieszonej dostawy.
Waveshare 5+1 DOF wysokoprężny serwomechanizm szeregowej magistrali zestaw ramienia robota
RoArm-M3 to zestaw ramienia robotycznego 5 + 1 DOF z serwomechanizmami o wysokim momencie obrotowym i magistralą szeregową, oparty na ESP32. Posiada staw nadgarstka 2-DOF, wspiera elastyczną rozbudowę i rozwój wtórny, sterowanie bezprzewodowe oraz jest kompatybilny z LeRobot do zaawansowanych zastosowań AI.

Wprowadzenie produktu
Seria RoArm-M3 to inteligentne ramię robotyczne 5 + 1 DOF zaprojektowane do innowacyjnych zastosowań. Charakteryzuje się lekką konstrukcją z efektywnym udźwigiem 0.2kg@0.5m, umożliwiającym elastyczny montaż na różnych platformach mobilnych. Podstawa o kącie obrotu 360° w połączeniu z pięcioma elastycznymi stawami tworzy przestrzeń roboczą o średnicy 1 metra.
Bezpośredni napęd stawów zwiększa precyzję pozycjonowania i niezawodność konstrukcji, a innowacyjna technologia podwójnego napędu podwaja moment obrotowy stawu barkowego. Wbudowany moduł głównego sterowania MCU ESP32 obsługuje wiele trybów sterowania bezprzewodowego, oferując rozbudowane interfejsy sterowania i protokoły komunikacyjne dla łatwego podłączania urządzeń.
Przyjazna dla użytkownika, wieloplatformowa aplikacja WEB oferuje prosty, wizualny tryb sterowania współrzędnymi dla łatwego rozpoczęcia pracy. Dostępne są kompleksowe samouczki graficzne i wideo umożliwiające szybkie naukę. Kompatybilna z ROS2 i różnymi komputerami hosta, obsługuje wiele trybów komunikacji bezprzewodowej i przewodowej. Płyty rozszerzeń pozwalają na dostosowanie EoAT (End of Arm Tooling) do różnych wymagań aplikacji.
Seria RoArm-M3 wspiera również popularny projekt AI robotycznego ramienia LeRobot, integrując jego wstępnie wytrenowane modele, zestawy danych z demonstracjami oraz środowiska symulacyjne. Zapewnia to silne wsparcie dla badań w dziedzinie Deep Learning, Imitation Learning i Reinforcement Learning. Deweloperzy mogą szybko wdrażać inteligentne algorytmy na RoArm-M3, korzystając z demonstracji i bibliotek algorytmów LeRobot, rozszerzając możliwości innowacyjnych zastosowań.
Seria RoArm-M3 osiąga doskonałą równowagę między lekką konstrukcją, przyjaznością dla użytkownika, rozbudową a otwartą innowacją. To wielofunkcyjny robotyczny ramię idealne do zastosowań wymagających elastyczności, rozbudowy i łatwości obsługi, integrujące inteligentne sterowanie, interakcję człowiek-maszyna oraz możliwość dostosowywania rozwoju.
Opcje wersji
Wybierz między RoArm-M3-S a RoArm-M3-Pro. RoArm-M3-Pro wyposażony jest w 5 metalowych serw ST3235 z magistralą, oferując zwiększoną trwałość i stabilny luz, który nie rośnie wraz z użytkowaniem.

Porównanie parametrów
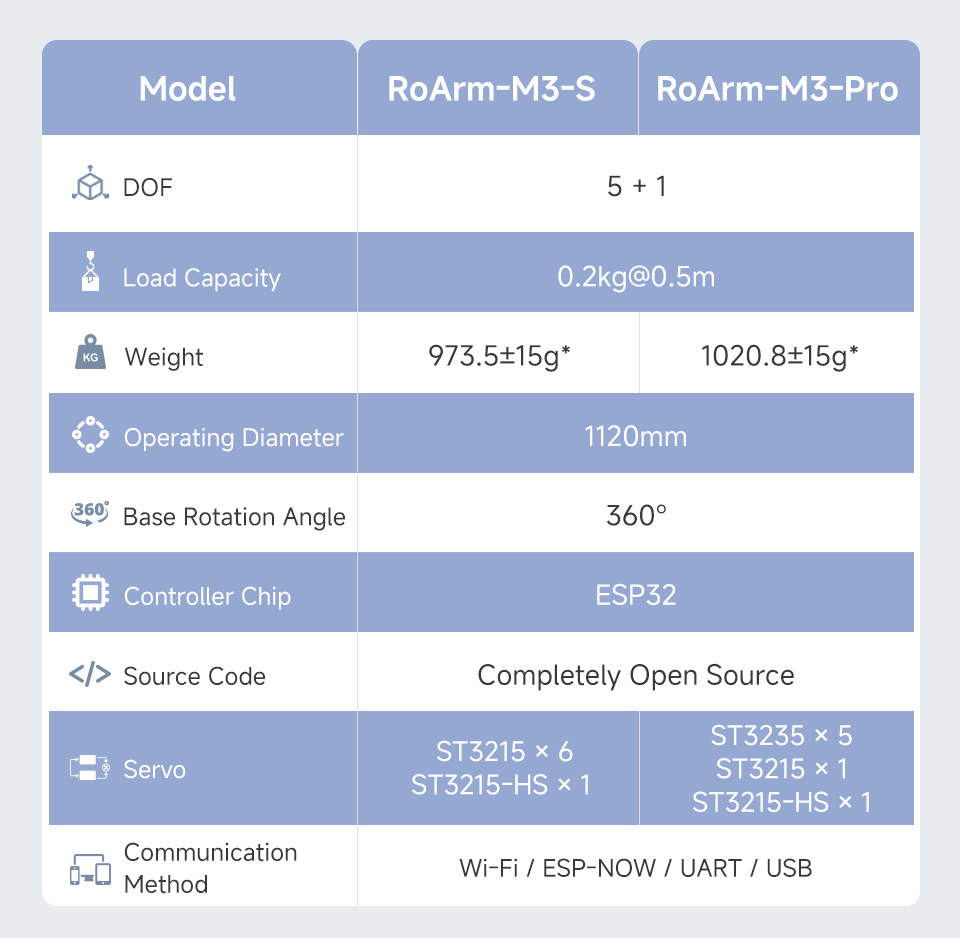
* Nie uwzględnia wagi zacisku mocującego krawędź stołu (290±10g).
Kompatybilny z popularnym projektem AI ramienia robotycznego - LeRobot
Seria ramion robotycznych RoArm-M3 bezproblemowo integruje się z open source'owym frameworkiem LeRobot na Hugging Face. Zapewnia to zasoby podstawowe, w tym wstępnie wytrenowane modele, zestawy danych z demonstracji ludzkich oraz środowiska symulacyjne. W połączeniu z płytą główną N-VIDIA Jetson Orin NX lub komputerem z dedykowaną kartą graficzną N-VIDIA użytkownicy mogą doświadczyć pełnego procesu projektów uczenia przez naśladowanie i uczenia ze wzmocnieniem.
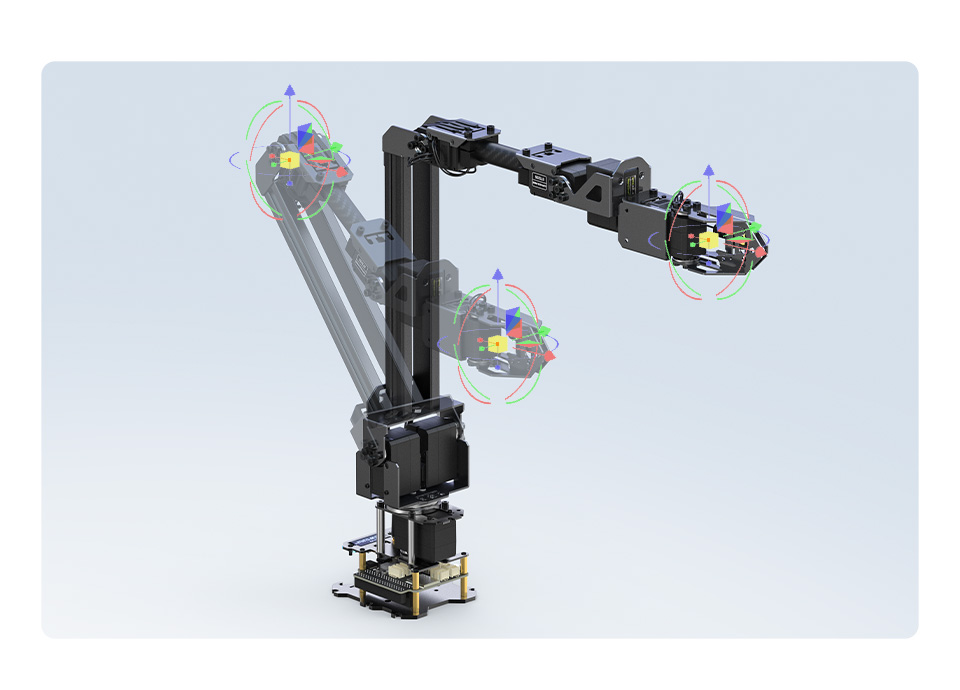
Elastyczne przeguby i przestrzeń wielokierunkowa
Dzięki podstawie obracającej się o 360° i elastycznym przegubom, RoArm-M3 tworzy przestrzeń operacyjną o średnicy 1 metra w pełnym zakresie kierunków, umożliwiając swobodne ruchy we wszystkich kierunkach.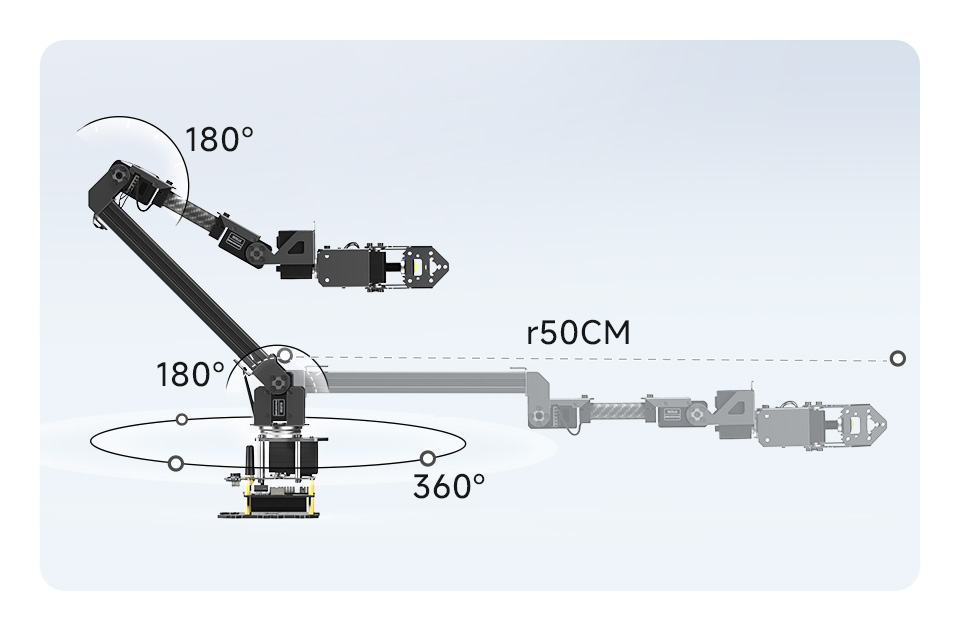
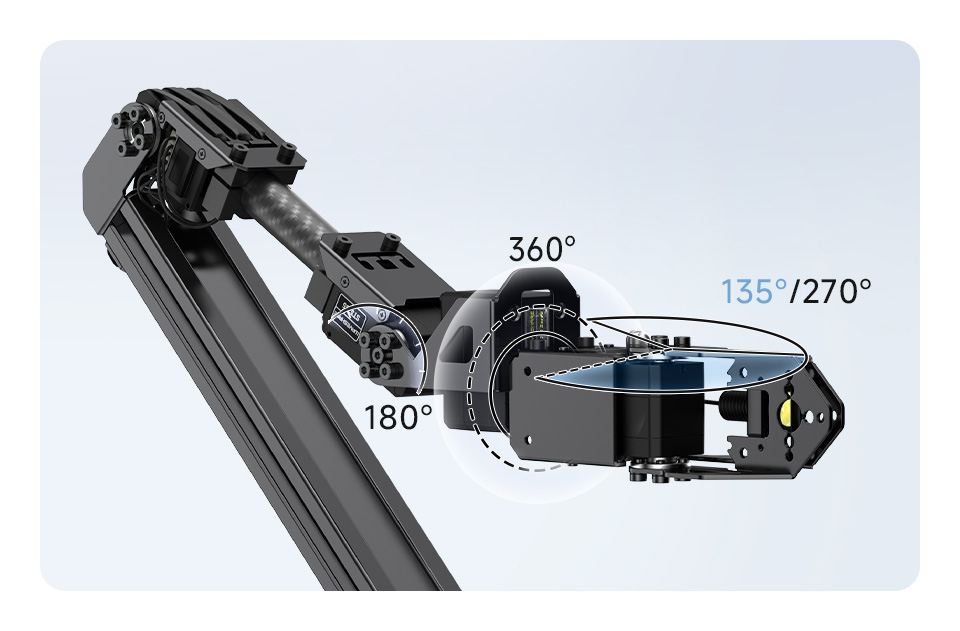
Przegub nadgarstka 2 DOF + EoAT dla bardziej elastycznego zaciskania
Wyposażone w przegub nadgarstka 2 DOF oferujący wsparcie dla ruchu w pionie i obrotu poziomego, to ramię robotyczne zapewnia płynną koordynację z narzędziem końcowym (EoAT) do wielowymiarowego zaciskania i operacji.
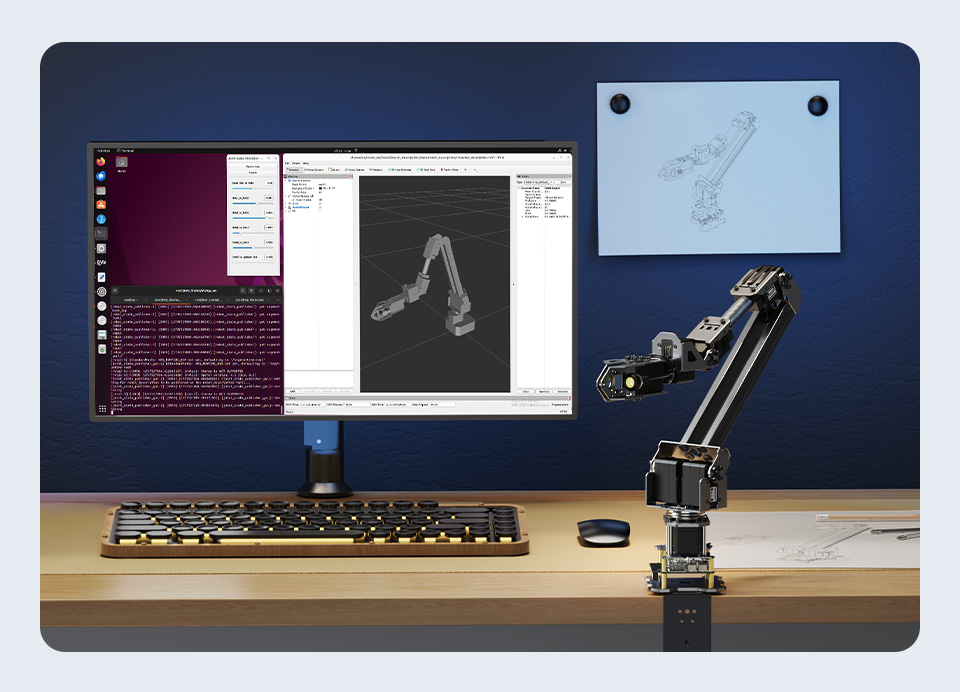
Łatwe sterowanie przez wieloplatformową aplikację internetową
Nie jest wymagana instalacja aplikacji. Uzyskaj dostęp i kontroluj RoArm-M3 za pomocą prostej aplikacji internetowej na telefonach komórkowych, tabletach lub komputerach. Ta open source'owa aplikacja webowa wspiera również dalszy rozwój niestandardowych interfejsów użytkownika i nowych funkcji.

Całkowicie open source do dalszego rozwoju
Kody sterujące i dokumentacja interfejsu komunikacyjnego dla serii RoArm-M3 są w pełni open source, wspierając dalszy rozwój w wielu językach i na różnych urządzeniach. Dostarczane są modułowe dema i samouczki, które pomagają początkującym łatwo zacząć.
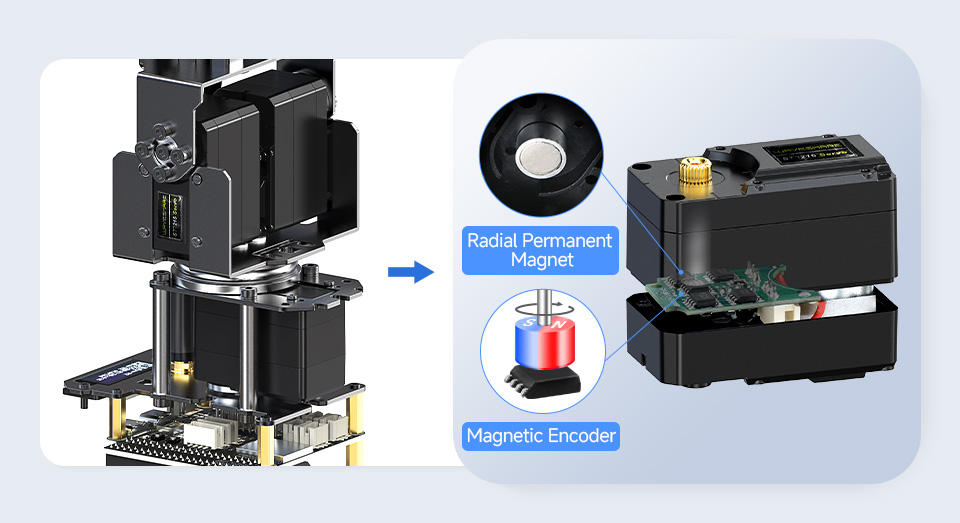
Projekt bezpośredniego napędu przegubowego: precyzja sprzężenia zwrotnego do 0,088°
Uzyskaj bardzo dokładne sprzężenie zwrotne kąta stawu bezpośrednio za pomocą 12-bitowego wysokoprecyzyjnego enkodera magnetycznego, bez przekładni. Pozwala to na precyzyjne obliczenie rzeczywistej pozycji aktualnego punktu docelowego na podstawie sprzężenia zwrotnego.
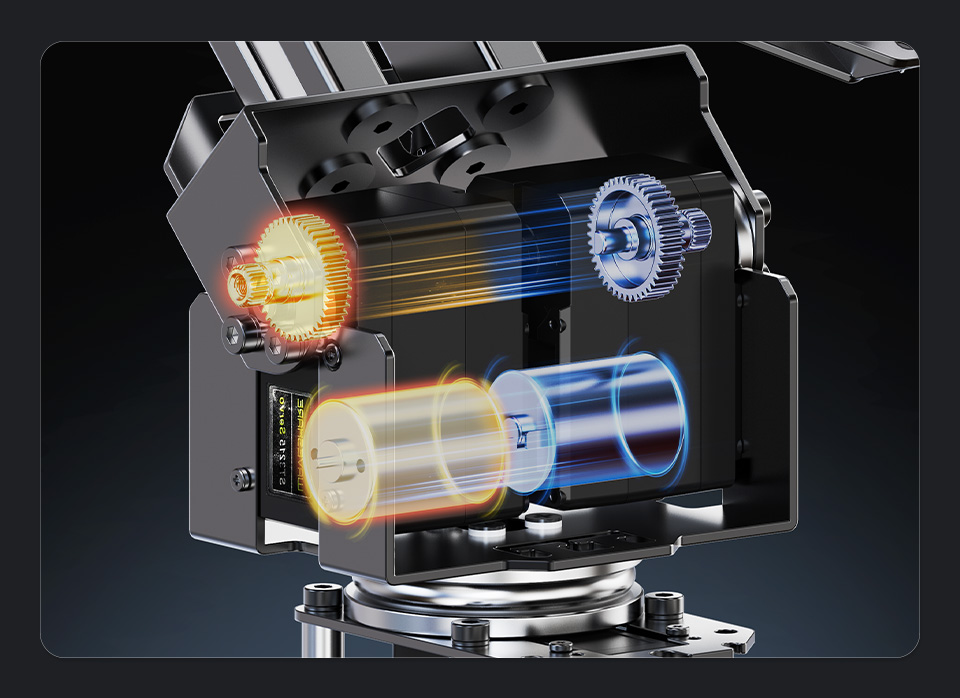
Innowacyjna technologia podwójnego napędu podwaja moment obrotowy stawu barkowego
Specjalnie opracowany algorytm sterowania podwójnym napędem umożliwia dwóm serwom w stawie barkowym skuteczną koordynację momentu obrotowego, znacznie zwiększając moc i ogólną nośność serii RoArm-M3.
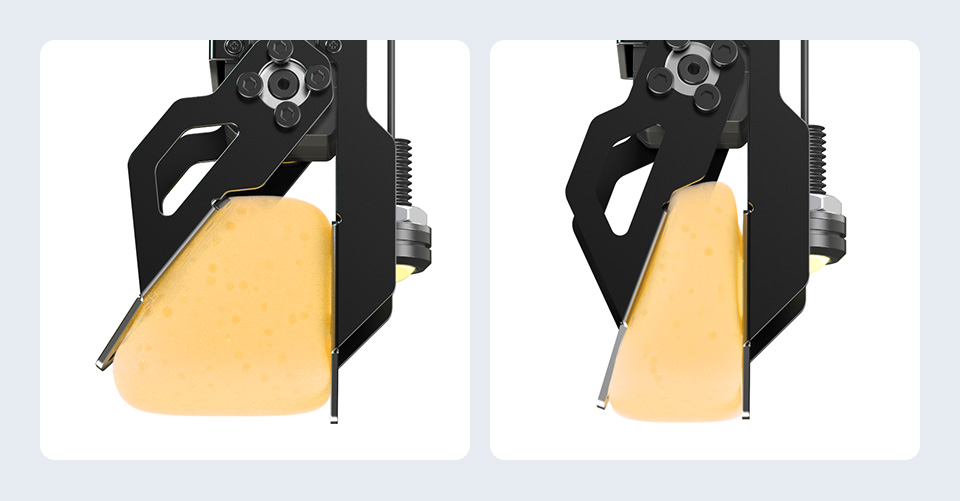
Zacisk bezpośredniego napędu umożliwia precyzyjną kontrolę siły
Konstrukcja zacisku bezpośredniego napędu pozwala na precyzyjną programową kontrolę siły zacisku, co czyni go idealnym do obsługi delikatnych przedmiotów bez nadmiernego nacisku.
Dynamiczne adaptacyjne sterowanie siłą zewnętrzną
Włącz tę funkcję, aby ograniczyć maksymalny moment obrotowy dla każdego stawu. Jeśli siła zewnętrzna przekroczy konfigurowalny próg momentu, ramię robota obróci się w odpowiedzi, wracając do określonej pozycji po zmniejszeniu siły.

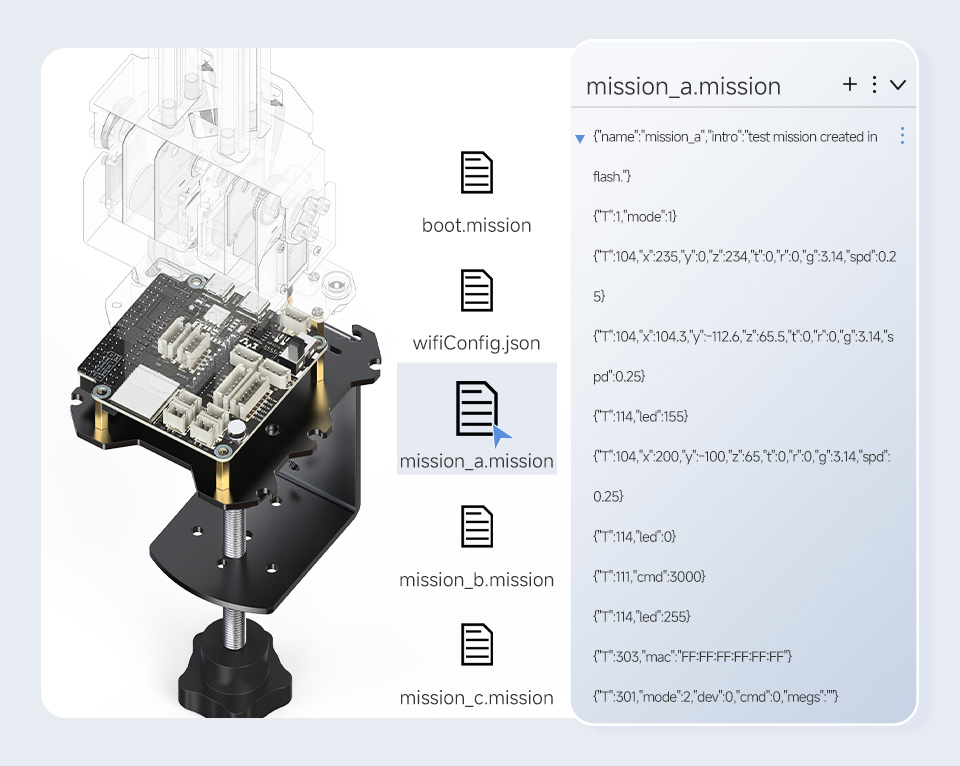
Automatyczne nagrywanie jednym kliknięciem: łatwe tworzenie akcji
RoArm-M3 może zapisywać instrukcje JSON do sterowania robotem jako pliki zadań bezpośrednio w pamięci Flash ESP32, zapewniając zachowanie danych nawet bez zasilania. Te pliki zadań pozwalają ramieniu robota wykonywać złożone i powtarzalne operacje.
Dokładne osiągnięcie celu przez wprowadzenie współrzędnych
Wykorzystaj otwartoźródłowy algorytm sterowania kinematyką odwrotną w trójwymiarowym układzie współrzędnych kartezjańskich. Poprzez wprowadzenie docelowej pozycji, ramię robota dokładnie osiąga punkt, obliczając kąt obrotu każdego stawu.
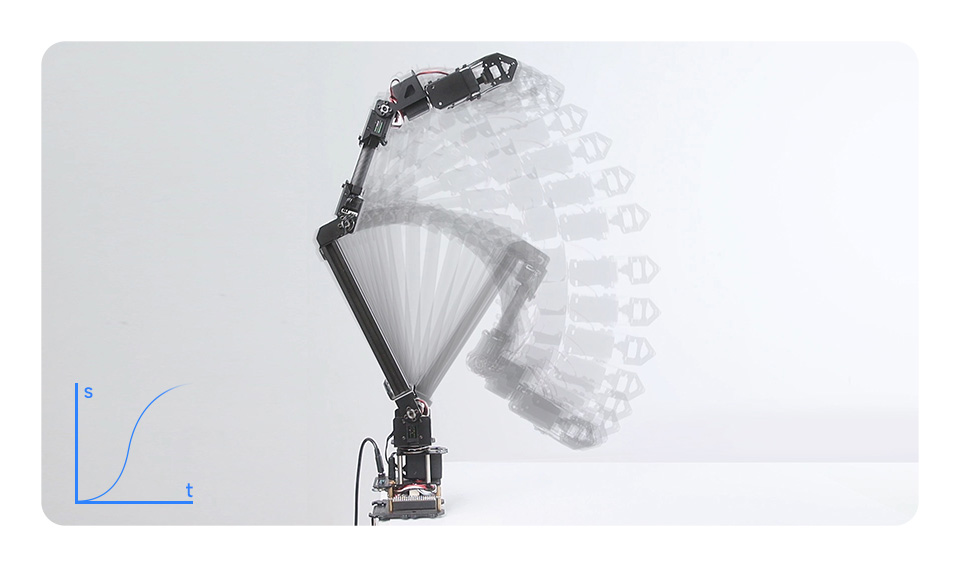
Sterowanie prędkością krzywej dla płynniejszego ruchu
Algorytm sterowania prędkością krzywej zapewnia płynniejszy i bardziej naturalny ruch ramienia robota, eliminując oscylacje podczas faz startu i zatrzymania.
Bezprzewodowe sterowanie ESP-NOW: zdalna współpraca o niskim opóźnieniu
ESP-NOW to protokół bezprzewodowej komunikacji ad hoc o niskim opóźnieniu, działający bez infrastruktury sieciowej. Steruj wieloma ramionami robota bezprzewodowo za pomocą metod nadawania, grupowych lub jeden do jednego.
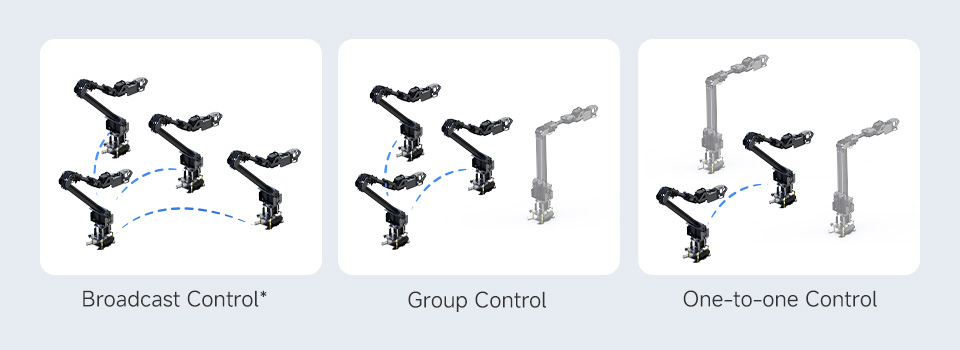
* Uwaga: Sterowanie nadawcze nie ma ograniczeń urządzeń, natomiast sterowanie grupowe obsługuje do 20 urządzeń. Szczegóły w WIKI.
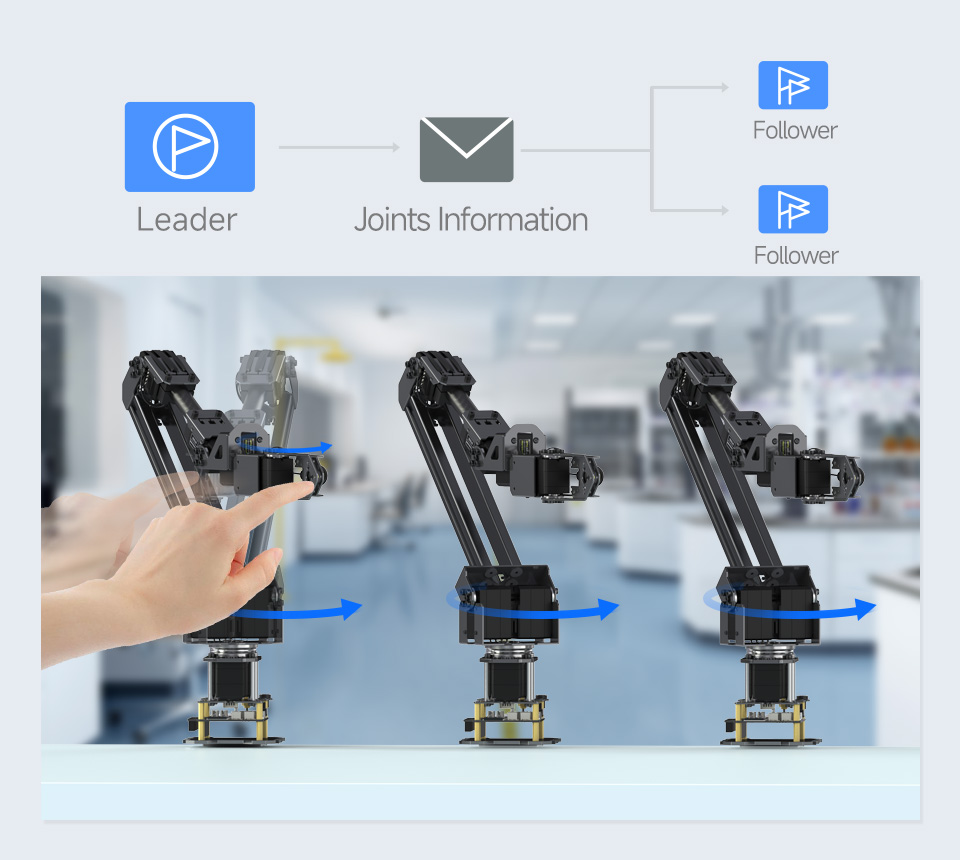
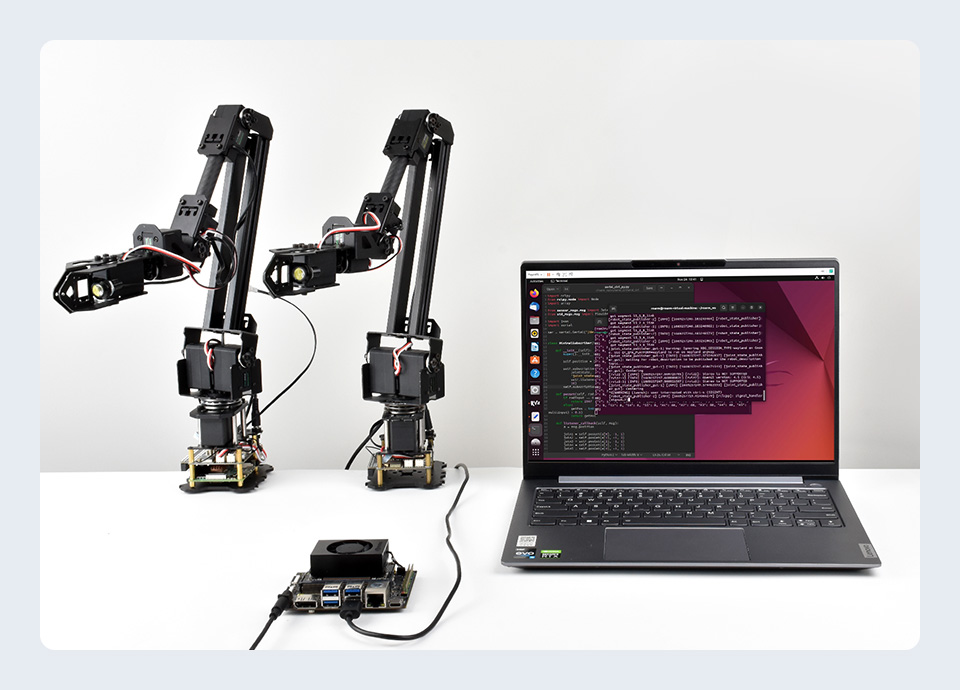
Obsługuje tryb sterowania lider-podążający oparty na ESP-NOW
W trybie sterowania lider-podążający ramię robota Lider przesyła informacje o kątach stawów za pomocą ESP-NOW. Ramiona robota Podążające precyzyjnie naśladują te ruchy w czasie rzeczywistym.
Wiele interfejsów sterowania, obsługa wielu urządzeń i języków
Poza aplikacją WEB, seria RoArm-M3 może być sterowana za pomocą żądań sieciowych protokołu HTTP, komunikacji szeregowej lub USB, wysyłając polecenia JSON i odbierając informacje zwrotne od różnych kontrolerów.
Wiele metod instalacji do integracji z Twoją aplikacją
Dostępne są różne schematy instalacji i zasoby do rozwoju wtórnego, umożliwiające elastyczną integrację w różnorodne projekty i zastosowania.

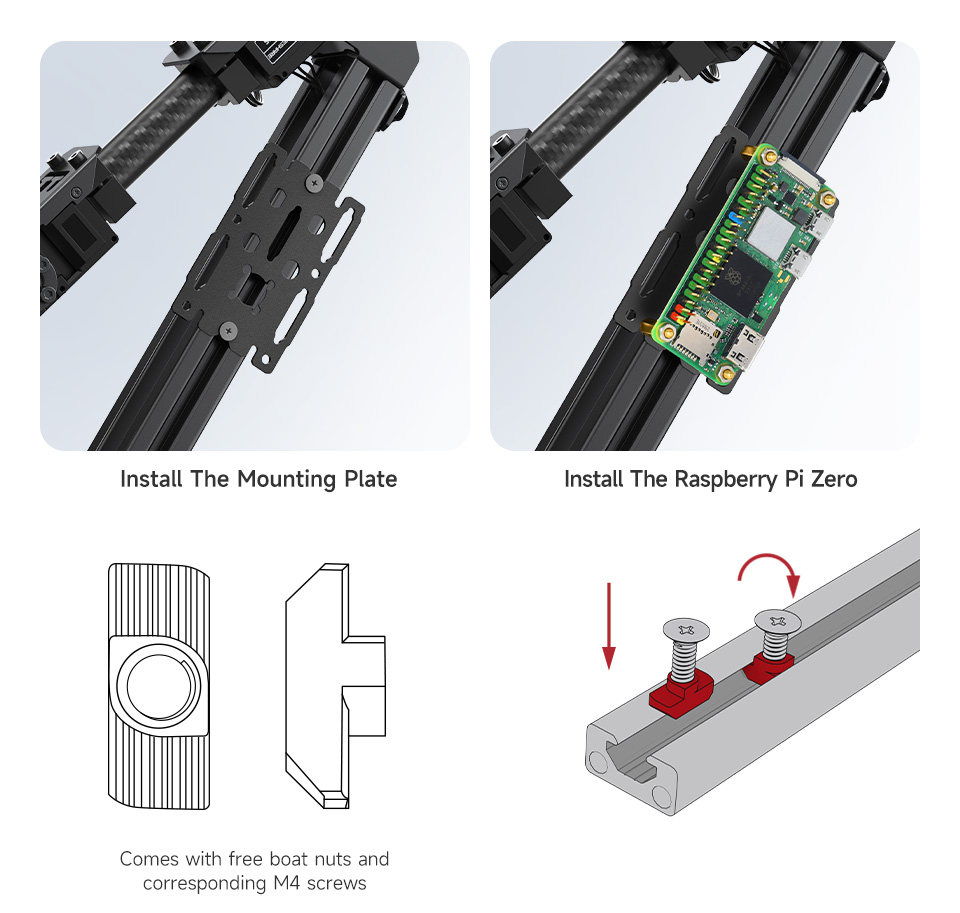
Łatwy montaż różnych peryferiów
Główna konstrukcja górnego ramienia zawiera dwie aluminiowe szyny 1020 zgodne z europejskim standardem, umożliwiające łatwy montaż dodatkowych peryferiów za pomocą nakrętek typu boat i śrub M4, aby spełnić konkretne potrzeby.
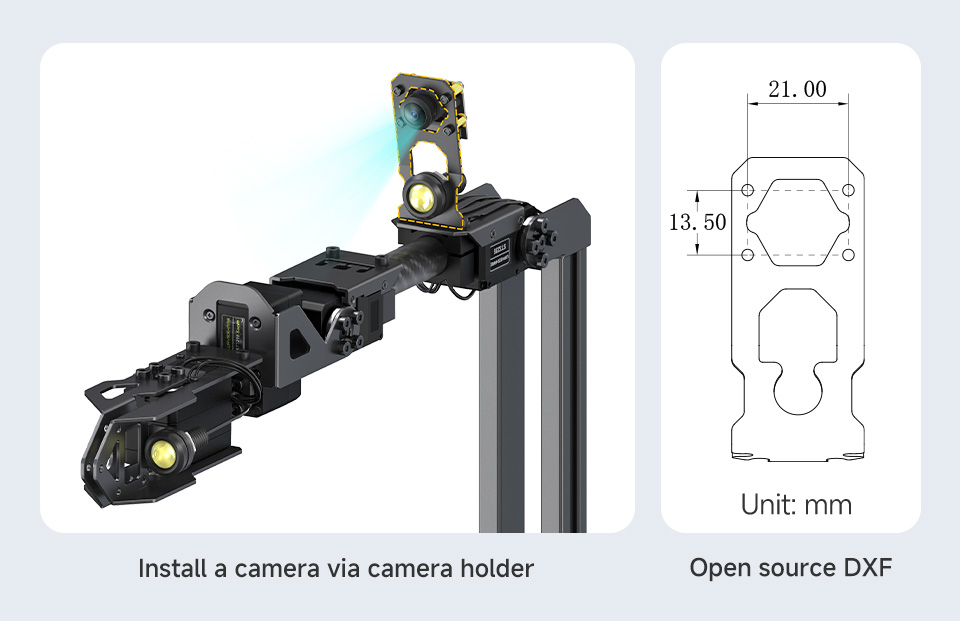
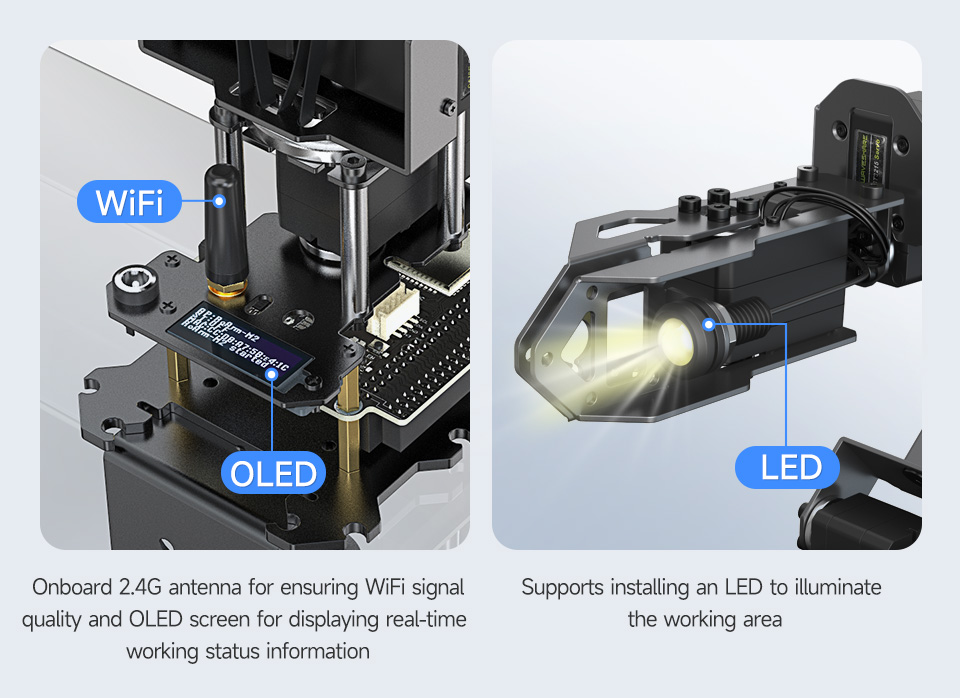
Obsługuje montaż kamery w celu rozszerzenia zastosowań wizualnych
Zawiera uchwyt na kamerę i otwarte rysunki. Bezpośrednio zainstaluj kompatybilną kamerę lub dostosuj inne do zaawansowanych zastosowań wizualnych.
* tylko do celów referencyjnych, w zestawie znajduje się tylko dioda LED.
Płyta główna ESP32 na pokładzie
Posiada potężny główny kontroler MCU ESP32 obsługujący wiele protokołów komunikacji bezprzewodowej, z obfitymi zasobami open-source ułatwiającymi rozwój wtórny innowacyjnych aplikacji.
Kompatybilny z ROS2: Dostarcza plik ustanawiania modelu i wspiera współpracę wielu urządzeń
Oferuje węzły komunikacyjne ROS2, plik opisu modelu URDF oraz przyjazny dla początkujących tutorial ROS2.
Bogate zasoby tutoriali do rozwoju wtórnego
Dostarczone są kompleksowe tutoriale jednostkowe i przykłady obejmujące różne funkcje i typowe scenariusze zastosowań, pomagające użytkownikom szybko opanować rozwój wtórny.
Płyta sterownika ogólnego przeznaczenia dla robotów
Płyta sterownika na pokładzie posiada bogate interfejsy i zasoby do innowacyjnego rozwoju i rozszerzania funkcji.
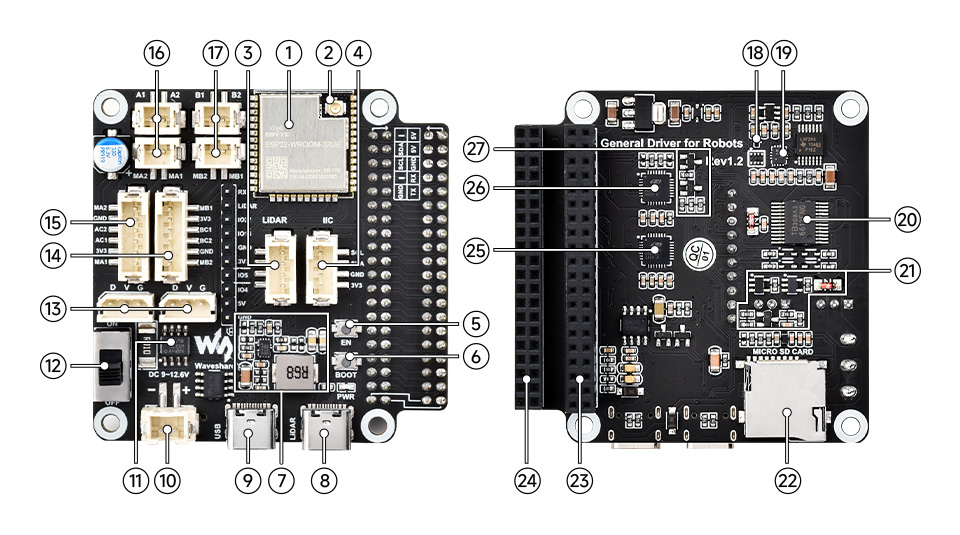
- Moduł kontrolera ESP32-WROOM-32: Można rozwijać za pomocą Arduino IDE.
- Złącze IPEX 1 WIFI: Do podłączenia anteny WIFI w celu zwiększenia zasięgu komunikacji bezprzewodowej.
- Interfejs LIDAR: Zintegrowana funkcja adaptera LIDAR.
- Interfejs rozszerzenia peryferiów I2C: Do podłączenia ekranu OLED lub innych czujników I2C.
- Przycisk reset: Naciśnij i zwolnij, aby zrestartować ESP32.
- Przycisk pobierania: Naciśnij podczas włączania, aby wejść w tryb pobierania.
- Obwód stabilizatora napięcia DC-DC 5V: Zapewnia zasilanie dla komputerów głównych takich jak Raspberry Pi lub Jetson Nano.
- Port Type-C (LADAR): Transmisja danych LIDAR.
- Port Type-C (USB): Interfejs komunikacyjny ESP32, do wgrywania programów na ESP32.
- Port zasilania XH2.54: Obsługuje wejście DC 7~13V, może bezpośrednio zasilać serwomechanizmy magistrali szeregowej i silniki.
- INA219: Układ monitorowania napięcia/prądu.
- Włącznik zasilania: Zewnętrzne włączanie/wyłączanie zasilania.
- Interfejs serwomechanizmu magistrali szeregowej serii ST: Do podłączenia z serwomechanizmem magistrali szeregowej ST3215 / ST3235.
- Interfejs silnika PH2.0 6P: Interfejs grupy B dla silnika z enkoderem.
- Interfejs silnika PH2.0 6P: Interfejs grupy A dla silnika z enkoderem.
- Interfejs silnika PH2.0 2P: Interfejs grupy A dla silnika bez enkodera.
- Interfejs silnika PH2.0 2P: Interfejs grupy B dla silnika bez enkodera.
- AK09918C: 3-osiowy kompas elektroniczny.
- QMI8658C: 6-osiowy czujnik ruchu.
- TB6612FNG: Układ sterowania silnikiem.
- Obwód sterowania serwomechanizmem magistrali szeregowej: Do sterowania wieloma serwomechanizmami ST3215 magistrali szeregowej i uzyskiwania informacji zwrotnej z serwomechanizmów.
- Gniazdo karty TF: Może być używane do przechowywania logów lub konfiguracji WIFI.
- 40PIN nagłówek GPIO: Do podłączenia z Raspberry Pi lub innymi płytami głównymi.
- 40PIN rozszerzony nagłówek: Łatwe użycie pinów GPIO Raspberry Pi lub innych płyt głównych.
- CP-2102: UART do USB, do transmisji danych LIDAR.
- CP-2102: UART do USB, do komunikacji z ESP32.
- Automatyczny obwód pobierania: Do wgrywania programów na ESP32 bez naciskania przycisków EN i BOOT.
Zróżnicowane zasoby pokładowe wspierają rozszerzenie funkcji
Zintegrowany z monitorowaniem napięcia baterii INA219 i 9-osiowym czujnikiem IMU, umożliwiający szeroką rozbudowę funkcji i innowacje.

Interakcja przeciągnij i upuść myszą
Wykorzystaj aplikacje internetowe i oprogramowanie desktopowe (otwarte programy Python) do ustawiania instrukcji działania za pomocą kliknięć i zwolnień myszy, zapewniając elastyczną kontrolę nad ramieniem robota.

Specyfikacje
| Cechy | Szczegóły |
|---|---|
| DOF | 5 + 1 |
| Przestrzeń robocza | Średnica pozioma: 1120mm (maks., 360° wszechkierunkowo), pionowa: 798mm (maks.) |
| Napięcie robocze | Zasilanie 12V 5A, obsługuje baterie litowe 3S (NIE w zestawie) |
| Nośność | 0.2kg@0.5m |
| Precyzja repozycjonowania | ~ 5mm |
| Prędkość obrotu serwa | 40obr./min (bez obciążenia, bez ograniczenia momentu) |
| Zakres pracy | BASE-360°, SHOULDER-180°, ELBOW-225°, HAND-135°/270° |
| Typ napędu | Serwo magistrali szeregowej TTL, przegub bezpośredniego napędu |
| Liczba serwomechanizmów | 7 |
| Czujnik kąta przegubu | 12-bitowy magnetyczny enkoder 360° |
| Moment obrotowy serwomechanizmu | 30KG.CM @12V, 20KG·CM @ 12V (EoAT) |
| Informacje zwrotne z przegubu | status serwomechanizmu, kąt przegubu, prędkość obrotowa, obciążenie przegubu, napięcie serwomechanizmu, prąd serwomechanizmu, temperatura serwomechanizmu i tryb pracy serwomechanizmu |
| Główne sterowanie | ESP32-WROOM-32 |
| Funkcje głównego modułu sterującego | WiFi, BT, Dual Core, 240MHz |
| Bezprzewodowy tryb sterowania | 2.4G-WiFi, ESP-NOW |
| Przewodowy tryb sterowania | USB, UART |
| Tryb pracy ręcznej | Interfejs sterowania WEB |
| Tryb pracy hosta | Polecenia UART / USB / WEB w formacie danych JSON |
| Obsługa hosta | Urządzenia podłączane przez USB, takie jak Raspberry Pi, Jetson Orin Nano i PC. |
| Funkcja EoAT | Funkcja zacisku domyślnie, może być zmieniona na dodatkowy stopień swobody |
| Moc LED | ≤1.5W |
| Rozmiar ekranu OLED | 0.91inch |
| Inne funkcje | Przełącznik zasilania 2-kanałowy 12V, 9-DOF IMU |
| Waga ramienia robota | RoArm-M3-S: 973.5±15g RoArm-M3-Pro: 1020.8g±15g (Nie wliczając wagi zacisku do mocowania krawędzi stołu) |
| Waga zacisku do mocowania krawędzi stołu | 290±10g |
| Obsługiwana grubość krawędzi stołu zacisku | 72mm |
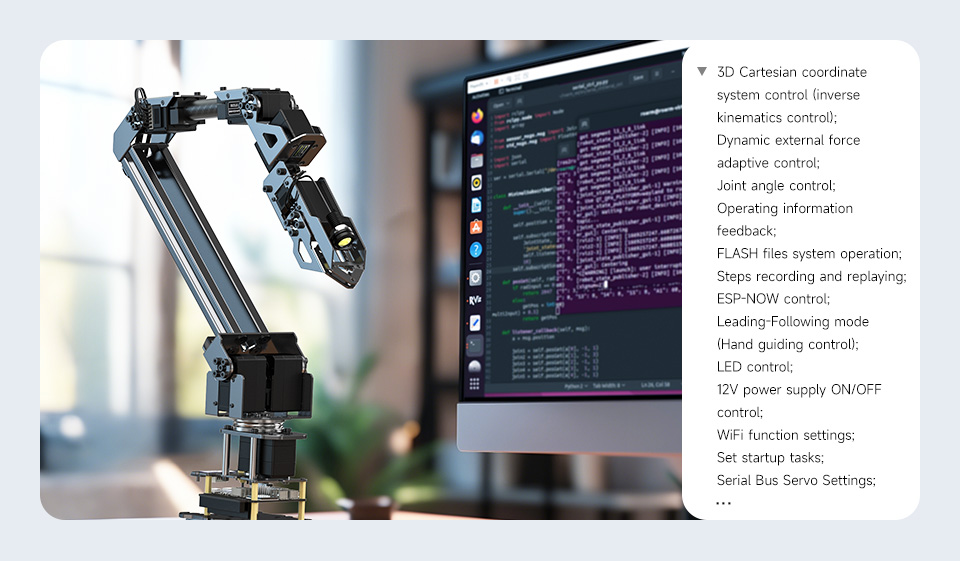
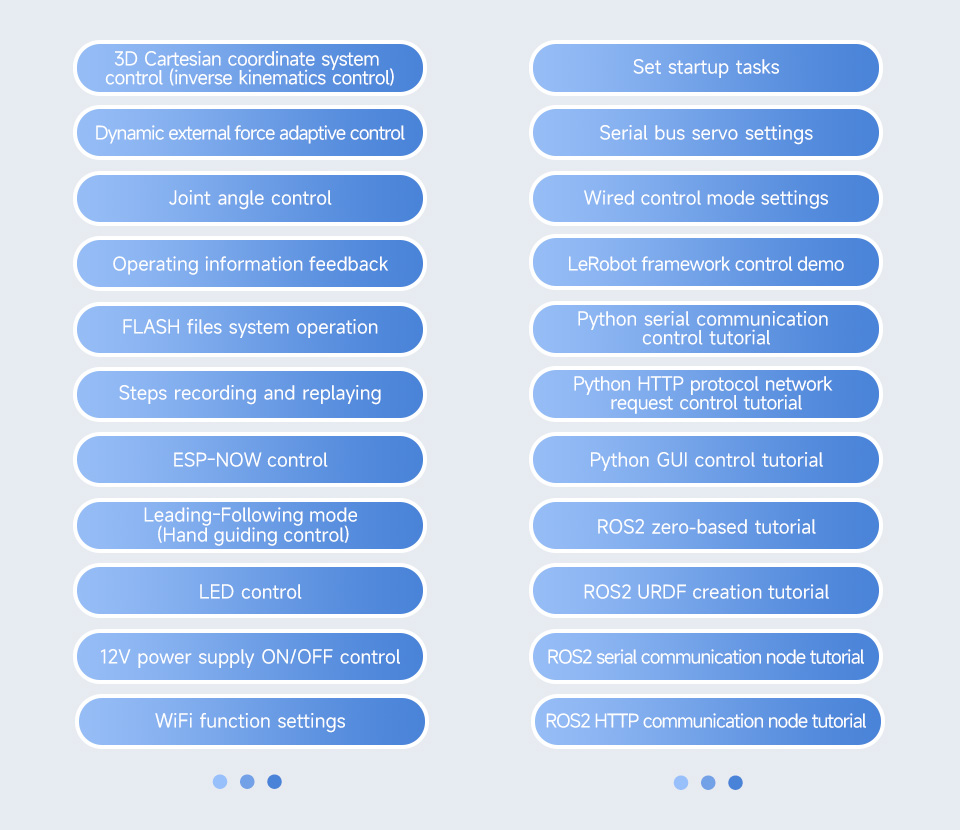
| Demo | Sterowanie w układzie współrzędnych kartezjańskich 3D (sterowanie kinematyką odwrotną); Dynamiczne adaptacyjne sterowanie siłą zewnętrzną; Sterowanie kątem stawu; Informacje zwrotne o działaniu; Operacje na plikach FLASH; Nagrywanie i odtwarzanie kroków; Sterowanie ESP-NOW; Tryb prowadzący-podążający (sterowanie ręczne); Sterowanie LED; Sterowanie włączaniem/wyłączaniem zasilania 12V; Ustawienia funkcji WiFi; Ustawianie zadań startowych; Ustawienia serwomechanizmu magistrali szeregowej; Ustawienia trybu informacji zwrotnej itd. (Uwaga: Szczegóły znajdują się w WIKI) |
Targi Produktów i Opakowań

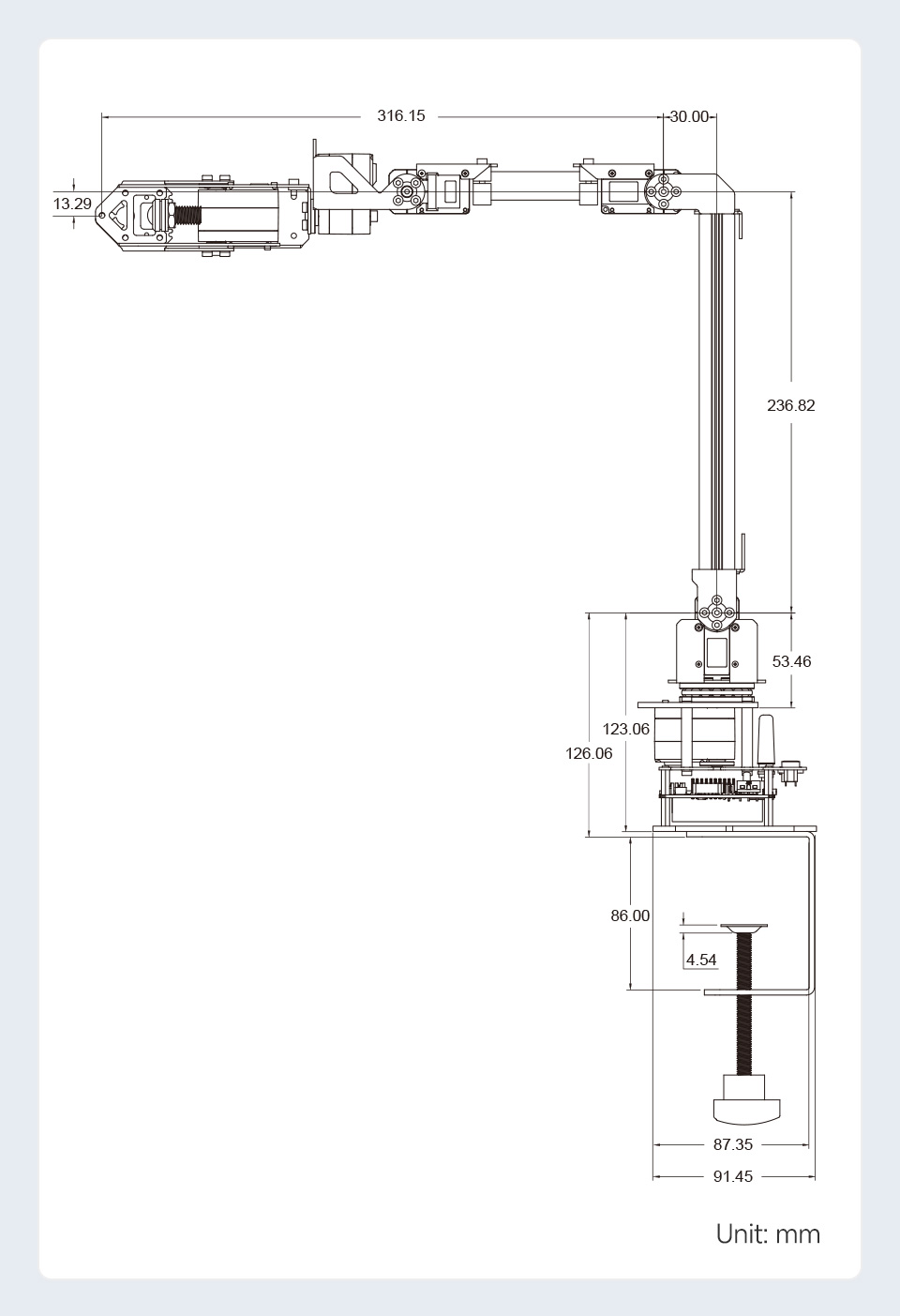
Wymiary
1. Ogólne informacje o wysyłce
- Oferujemy premium metody wysyłki z numerem śledzenia dla każdego zamówienia.
- Adresy wysyłkowe muszą być wpisane po angielsku bez znaków specjalnych, aby pomóc firmie kurierskiej rozpoznać Twój adres w systemie. Wysyłamy ściśle według podanego przez Ciebie adresu wysyłki. Prosimy o powiadomienie nas o każdej zmianie adresu przed oznaczeniem zamówienia jako „Wysłane”, aby uniknąć zagubienia paczki.
- Prosimy o natychmiastowy kontakt z naszym działem obsługi klienta, jeśli chcesz anulować lub zmienić zamówienie. Po osiągnięciu statusu „Wysłane” zamówienie nie może być już anulowane ani zmieniane. Aby uniknąć komplikacji, prosimy o ponowne sprawdzenie koszyka przed finalizacją zakupu.
- Możemy wysłać wszystkie zamówienia dostępne w magazynie w ciągu 1 dnia roboczego po potwierdzeniu zamówienia.
- Wszystkie przedmioty są sprawdzane przed wysyłką i starannie pakowane ręcznie.
- Zgodnie ze standardową praktyką kurierską, przed podpisaniem odbioru towaru należy sprawdzić zawartość paczki. W przeciwnym razie nie ponosimy odpowiedzialności za jakiekolwiek uszkodzenia, które mogły powstać podczas transportu.
🚀 Potrzebujesz szybszej wysyłki?
Jeśli potrzebujesz przyspieszonej wysyłki (Express), skontaktuj się z naszym zespołem obsługi klienta pod adresem info@openelab.io aby uzyskać spersonalizowaną wycenę dostosowaną do Twojej lokalizacji.
2. Stawki i opcje wysyłki
Nasze stawki wysyłkowe są obliczane na podstawie wartości zamówienia i miejsca docelowego. Prosimy o zapoznanie się z poniższymi tabelami w celu uzyskania szczegółów.
2.1 Niemcy (krajowe)
| Metoda wysyłki | Wartość zamówienia | Koszt | Szacowana dostawa |
|---|---|---|---|
| Deutsche Post | €0 - €50.00 | €4.95 | 2-4 dni robocze |
| Deutsche Post | Powyżej 50,00 € | Darmowa | 2-4 dni robocze |
|
DHL Paket (Szybsza dostawa) |
€0 - €50.00 | €6.95 | 1-3 dni robocze |
|
DHL Paket (Szybsza dostawa) |
€50.00 - €100.00 | €2.00 | 1-3 dni robocze |
|
DHL Paket (Szybsza dostawa) |
Powyżej 100,00 € | Darmowa | 1-3 dni robocze |
2.2 Unia Europejska (UE)*
*W tym:
| Metoda wysyłki | Wartość zamówienia | Koszt | Szacowana dostawa |
|---|---|---|---|
| Deutsche Post | €0 - €100.00 | €7.95 | 5-9 dni roboczych |
| Deutsche Post | Powyżej 100,00 € | Darmowa | 5-9 dni roboczych |
|
DHL Paket (Szybsza dostawa) |
€0 - €100.00 | €15.95 | 3-7 dni roboczych |
|
DHL Paket (Szybsza dostawa) |
€100.00 - €250.00 | €7.95 | 3-7 dni roboczych |
|
DHL Paket (Szybsza dostawa) |
Powyżej 250,00 € | Darmowa | 3-7 dni roboczych |
2.3 Stany Zjednoczone
| Region | Metoda wysyłki | Wartość zamówienia | Koszt | Szacowana dostawa |
|---|---|---|---|---|
|
Kontynentalne USA (50 Stanów) |
USPS Ground Advantage | €0 - €45.00 | €5.95 | 3-7 dni roboczych |
| USPS Ground Advantage | Powyżej 45,00 € | Darmowa | 3-7 dni roboczych | |
| USPS Priority Mail | €0 - €45.00 | €16.95 | 1-4 dni robocze | |
| USPS Priority Mail | Powyżej 45,00 € | €14.95 | 1-4 dni robocze | |
|
Non-Continental U.S. (AK, HI, PR, itd.) |
USPS Ground Advantage | €0 - €60.00 | €6.95 | 5-9 dni roboczych |
| USPS Ground Advantage | Powyżej 60,00 € | Darmowa | 5-9 dni roboczych |
* Regiony w Non-Continental U.S. obejmują: Alaskę, Samoa Amerykańskie, Guam, Hawaje, Wyspy Marshalla, Północne Mariany, Palau, Portoryko, Wyspy Dziewicze Stanów Zjednoczonych oraz wszystkie adresy Sił Zbrojnych USA. Wysyłka i dostawa do tych obszarów podlegają zasadom wysyłki Non-Continental U.S.
2.4 Międzynarodowa (poza UE)
Dla wybranych międzynarodowych destynacji, w tym Szwajcarii, Wielkiej Brytanii i Norwegii.
| Kwota zamówienia | Koszt wysyłki |
|---|---|
| €0 - €300.00 | €19.95 |
| Powyżej 300,00 € | Darmowa |
Ważna informacja:
- Status zapasów: Prosimy o sprawdzenie statusu zapasów na stronie produktu. Nasz system wyświetla stan magazynowy w czasie rzeczywistym dla naszych magazynów w Monachium i Long Beach. Jeśli produkt jest niedostępny w tych lokalizacjach, zostanie oznaczony jako "Pre-order". Nadal możesz złożyć zamówienie na te produkty.
- Realizacja przedsprzedaży: Dla produktów "Pre-order" organizujemy najbardziej efektywne rozwiązanie logistyczne, abyś otrzymał swoje towary jak najszybciej. Twoja paczka może zostać wysłana bezpośrednio z naszego magazynu w Shenzhen. Alternatywnie, w ramach standardowego procesu uzupełniania zapasów, możemy najpierw przetransportować towary do naszego magazynu w Monachium lub Long Beach (zwykle zajmuje to 5-10 dni roboczych), zanim zostaną do Ciebie wysłane.
- Wysyłki podzielone: Jeśli Twoje zamówienie zawiera zarówno produkty dostępne od ręki, jak i na przedsprzedaż, priorytetowo wyślemy produkty dostępne od ręki z lokalnego magazynu natychmiast. Pozostałe produkty z przedsprzedaży zostaną wysłane do Ciebie w osobnej przesyłce, gdy tylko będą gotowe.
3. Magazyn międzynarodowy
Nasze produkty są przechowywane w naszych magazynach w Monachium, Long Beach i Shenzhen, aby zapewnić bardziej elastyczne rozwiązania logistyczne dostosowane do różnych regionów i potrzeb klientów. Na stronie opisu każdego produktu wskazujemy konkretną lokalizację magazynu, aby pomóc Ci lepiej zaplanować zakup i harmonogram dostawy.
3.1 Magazyn w Niemczech
Dla produktów przechowywanych w naszym magazynie w Monachium korzystamy z usług Deutsche Post lub DHL, w zależności od rozmiaru paczki. Logistyka na terenie Niemiec jest bardzo efektywna, a szacowany czas dostawy to 2-4 dni robocze, co zapewnia szybkie i wygodne otrzymanie zamówienia. Dla krajów Europy Zachodniej szacowany czas dostawy to 4-6 dni roboczych. Dla krajów Europy Wschodniej szacowany czas dostawy to 6-8 dni roboczych.
3.2 Magazyn w USA
Dla produktów przechowywanych w naszym magazynie w Long Beach korzystamy z usług USPS lub UPS, w zależności od rozmiaru paczki. Logistyka na terenie USA jest bardzo efektywna, a szacowany czas dostawy to 3-7 dni roboczych, co zapewnia szybkie i wygodne otrzymanie zamówienia.
3.3 Magazyn w Chinach
Dla produktów na zamówienie lub zamówień realizowanych bezpośrednio z naszego magazynu w Shenzhen, korzystamy z YunExpress dla niezawodnej wysyłki międzynarodowej. Ze względu na złożoność wysyłek międzynarodowych, szacowany czas dostawy tych paczek to około 10 dni roboczych, choć może się on nieznacznie różnić z powodu procedur celnych lub innych czynników niezależnych. W przeciwnym razie produkty zostaną uzupełnione w naszych magazynach w Monachium lub USA przed ostateczną dostawą, jak opisano w powyższym "Ważnym powiadomieniu".
4. Cła i podatki
4.1 Jak OpenELAB obsługuje cła przy imporcie lub eksporcie?
Dla państw członkowskich UE: Niezależnie od tego, czy wysyłka odbywa się z Niemiec czy Chin, pokrywamy wszystkie cła i podatki importowe (DDP), zapewniając, że otrzymasz swoją paczkę bez dodatkowych kosztów i problemów z odprawą celną.
Dla krajów spoza Unii Europejskiej, takich jak Szwajcaria i Norwegia, możesz być obciążony cłami importowymi, podatkami i/lub opłatami celnymi naliczanymi przy dostawie. Opłaty te różnią się w zależności od kraju i stanowią wyłączną odpowiedzialność odbiorcy.
⚠️ Odmowa odbioru: Jeśli odmówisz zapłaty tych opłat przy dostawie, a paczka zostanie do nas zwrócona, kwota zwrotu zostanie obliczona po odliczeniu pierwotnych kosztów wysyłki, kosztów zwrotu oraz wszelkich obowiązujących opłat celnych lub magazynowych.
4.2 Jak naliczany jest VAT, gdy Klient składa zamówienie w OpenELAB?
Zgodnie z najnowszymi przepisami dotyczącymi VAT w e-commerce w UE, OpenELAB ma prawo naliczyć kwotę VAT przy kasie. Standardowa stawka obowiązującego VAT jest uzależniona od przepisów kraju docelowego. Za te zamówienia nie zostanie naliczony dodatkowy VAT przy dostawie.



