



















































































































Waveshare vysokootáčkový sériový sběrnicový servo RoArm-M2 stolní robotická ramenní sada
Pre-order
Doprava zdarma od 30 € v Německu, 50 € v EU!
- Předobjednávky budou odeslány do 5 pracovních dnů.
- Doba dodání do zemí EU a USA: 10 pracovních dnů.
- Doba dodání do ostatních zemí: 15 pracovních dnů.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Waveshare vysokootáčkový sériový sběrnicový servo RoArm-M2 stolní robotická ramenní sada
RoArm-M2
4-DOF vysokootáčkové sériové servo robotické rameno
Podporuje flexibilní rozšíření a sekundární vývoj

Přehled funkcí
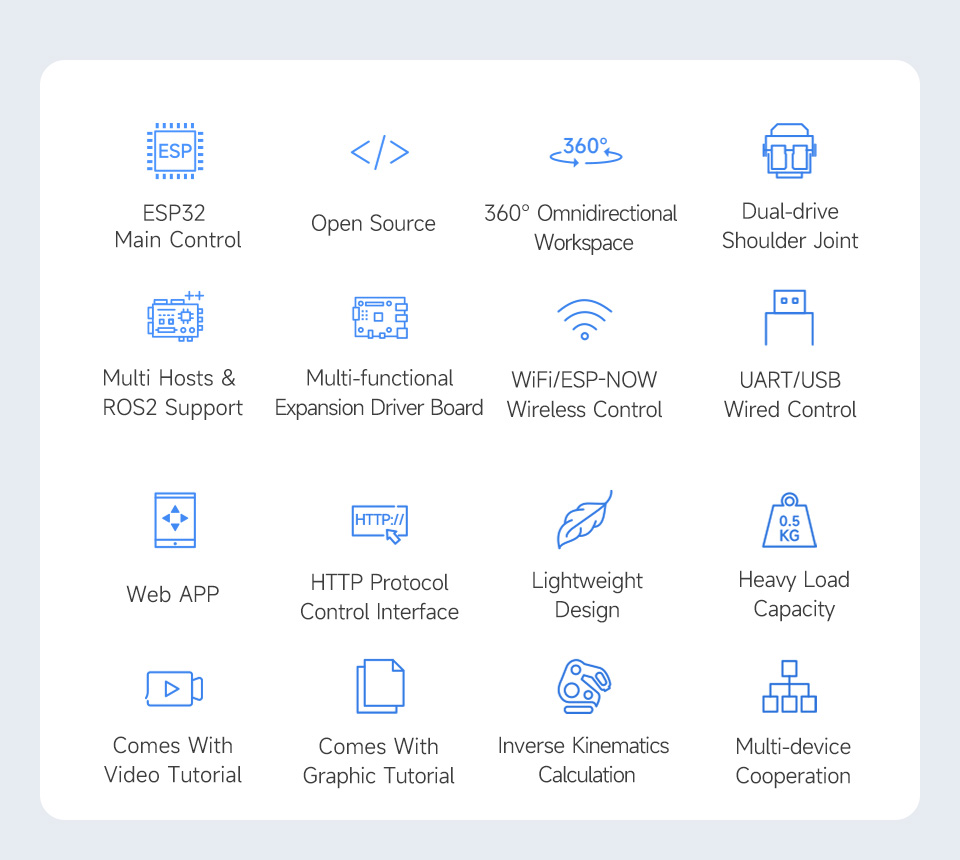
Řada RoArm-M2 je 4DOF chytré robotické rameno navržené pro inovativní aplikace. Používá lehkou konstrukci s celkovou hmotností méně než 900 g a efektivní nosnost [email protected], může být flexibilně namontováno na různých mobilních platformách. Používá 360° všesměrovou základnu v kombinaci s třemi flexibilními klouby k vytvoření pracovního prostoru o průměru 1 metr.
Přímý pohon kloubů zvyšuje přesnost přemístění a také zlepšuje strukturální spolehlivost, s inovativní technologií dvojitého pohonu zdvojnásobuje točivý moment ramenního kloubu. Vestavěný hlavní řídicí modul ESP32 MCU podporuje více bezdrátových režimů řízení, poskytuje řídicí rozhraní a bohaté komunikační protokoly pro snadné připojení k různým zařízením.
Poskytuje uživatelsky přívětivou a multiplatformní WEB aplikaci, která integruje jednoduchý a vizualizovaný režim řízení souřadnic, což usnadňuje začátek práce. Obsahuje bohaté grafické a video návody, které vám pomohou rychle se naučit a používat zařízení. Kompatibilní s ROS2 a různými hostitelskými počítači, podporuje různé bezdrátové a kabelové komunikační režimy. Dodává se s rozšiřovací deskou, podporuje přizpůsobení EoAT (nástroj na konci ramene) pro splnění požadavků inovativních aplikací.
Řada RoArm-M2 dosahuje vynikající rovnováhy mezi nízkou hmotností, uživatelskou přívětivostí, rozšiřitelností a otevřenou inovací, je to multifunkční robotické rameno, které integruje inteligentní řízení, interakci člověk-stroj a přizpůsobitelný vývoj. Ideální pro aplikace vyžadující kombinaci flexibility, rozšiřitelnosti a uživatelské přívětivosti.
Možnosti verzí
Nabízí možnosti pro RoArm-M2-S / RoArm-M2-Pro. Vylepšená verze RoArm-M2-Pro je vybavena celokovovými servy ST3235 s sběrnicí, nabízí robustnější tělo a stabilní vůli, která se s používáním nezvyšuje, čímž se zvyšuje odolnost produktu.

Porovnání parametrů
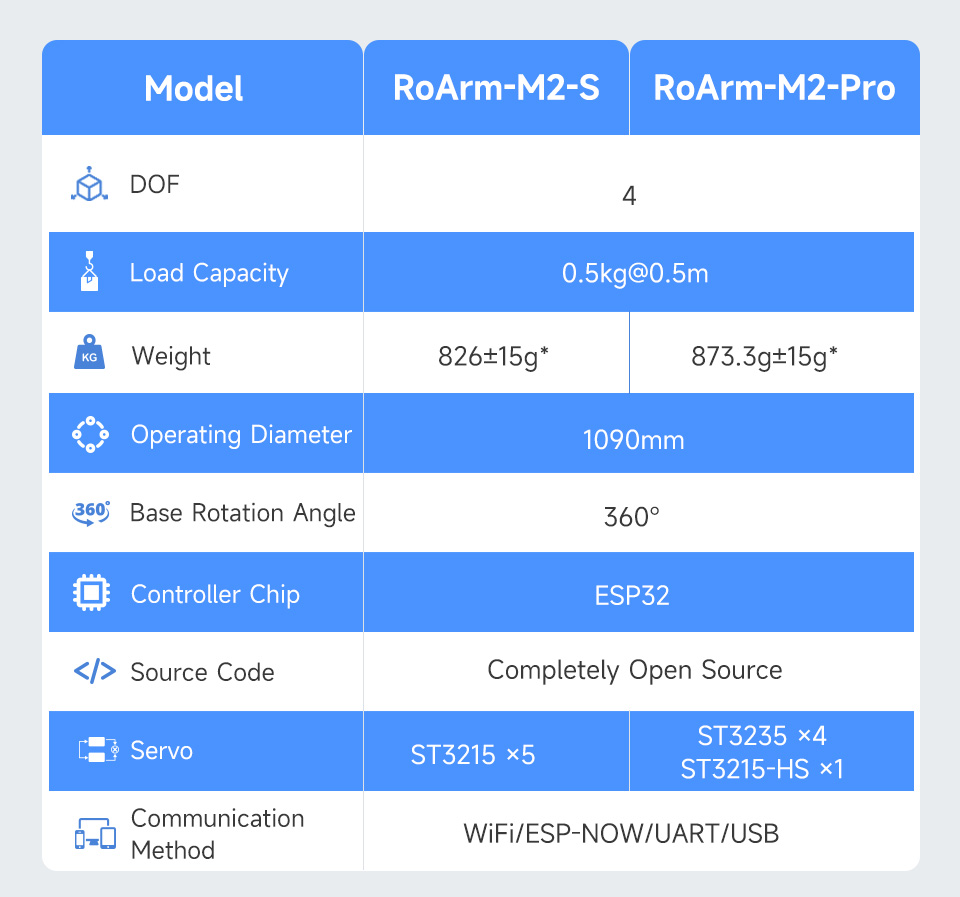
* Nezahrnuje hmotnost svorky pro upevnění na okraji stolu (290 g).
Více způsobů montáže EoAT
EoAT podporuje různé způsoby montáže, může být použit jako svorka nebo jako čtvrtý stupeň volnosti. Poskytuje open-source DXF a 3D modely pro DIY a sekundární vývoj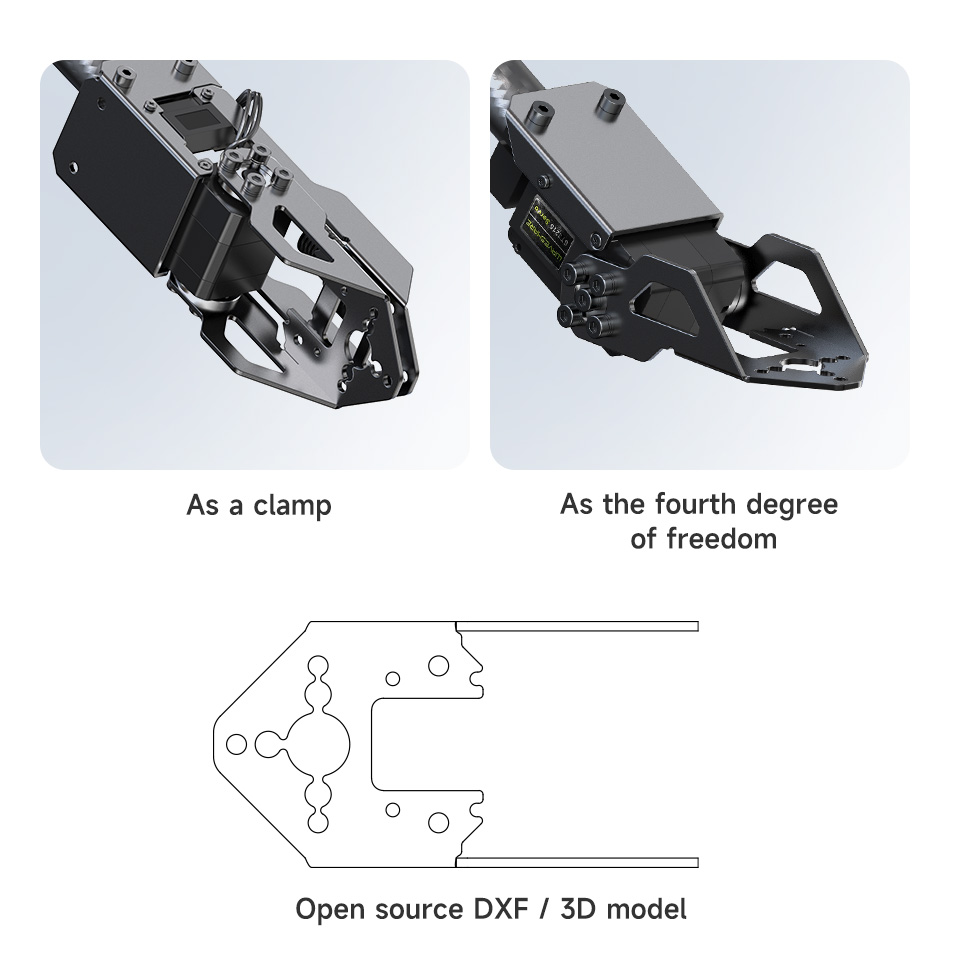
Flexibilní klouby × všesměrový prostor
Používá základnu s otočením o 360° a flexibilní klouby k vytvoření všesměrového pracovního prostoru o průměru 1 metr, což umožňuje EoAT volný pohyb ve všech směrech
Snadné ovládání přes
Víceplatformní webová aplikace
Není potřeba instalace aplikace, přístup po zadání adresy. Umožňuje uživatelům připojit se a ovládat RoArm-M2 přes mobilní telefony, tablety a počítače kliknutím na tlačítka ve webové aplikaci. Podporuje sekundární vývoj této open-source webové aplikace pro přizpůsobení uživatelského rozhraní a přidání nových funkcí.
Úplně otevřený zdroj pro
druhotný vývoj
Úplně otevřený zdroj pro řídicí kódy a dokumentaci komunikačního rozhraní série Roarm-M2, podporuje více jazyků a zařízení pro sekundární vývoj. Poskytuje modulární ukázky a návody pro uživatele od nuly, snadné začít.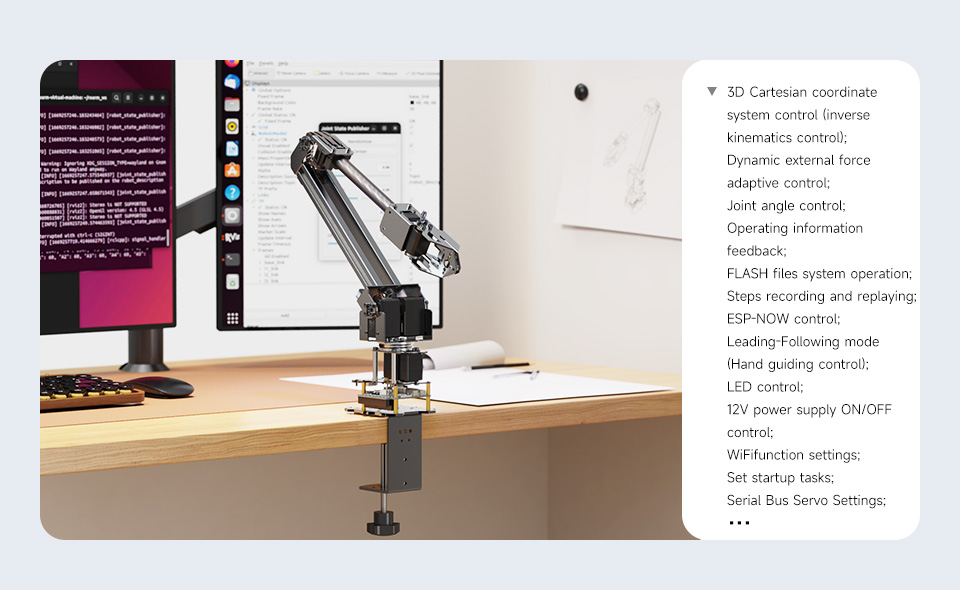
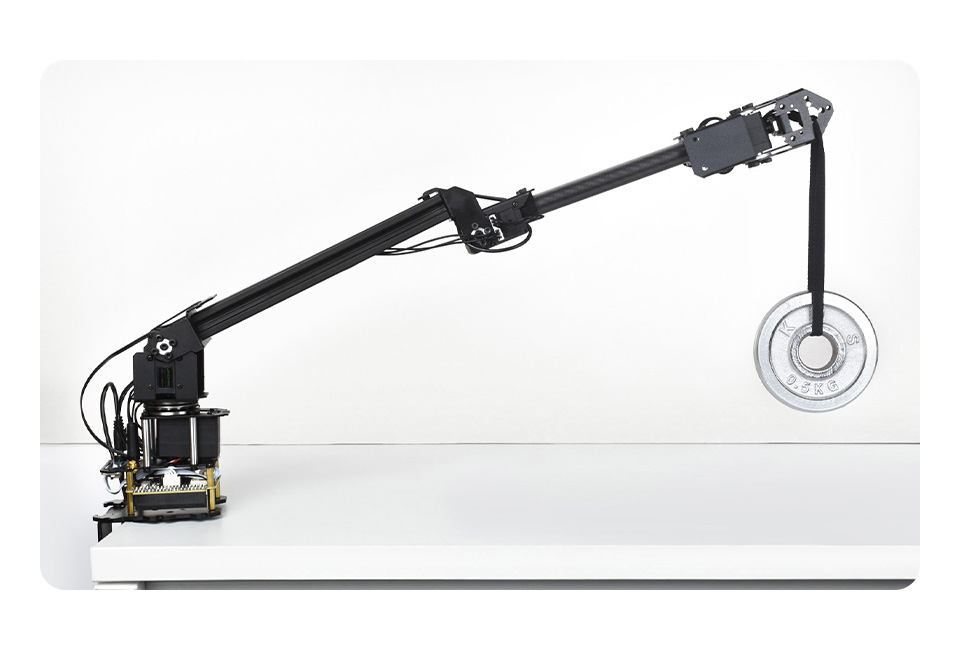
Lehký rám, vynikající nosnost
lehký rám s celkovou hmotností méně než 900 g, používá uhlíková vlákna
a slitina hliníku 5052 pro zajištění stability při vysokých zatíženích,
vhodné pro různé podvozky mobilních robotů

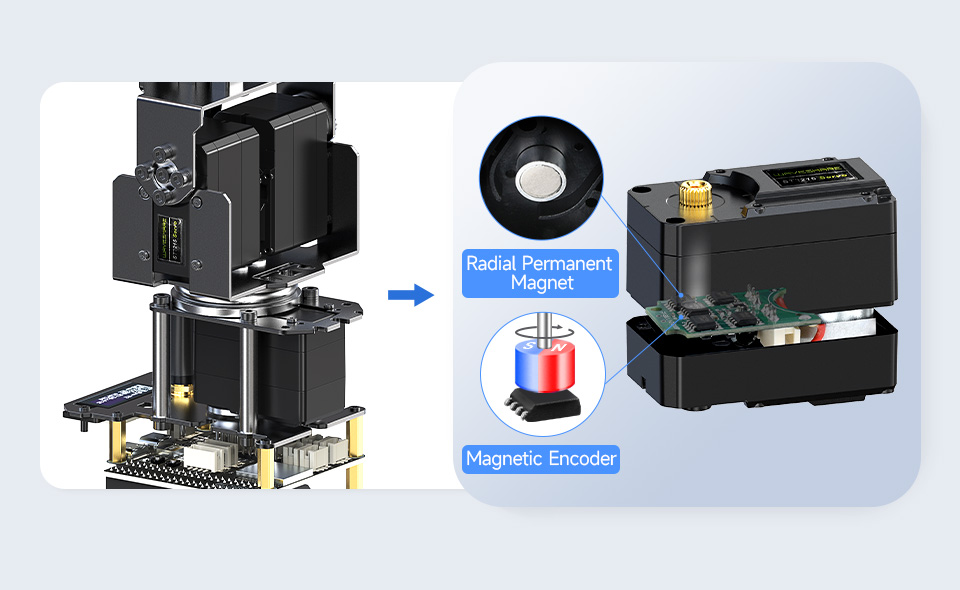
Přímý pohon kloubu
Přesnost zpětné vazby až 0,088°
Úhel kloubu lze přímo získat pomocí 12bitového vysoce přesného magnetického enkodéru bez jakýchkoli redukčních skupin, což je přesnější, a skutečná pozice aktuálního cílového bodu může být vypočítána na základě zpětné vazby úhlu kloubu.
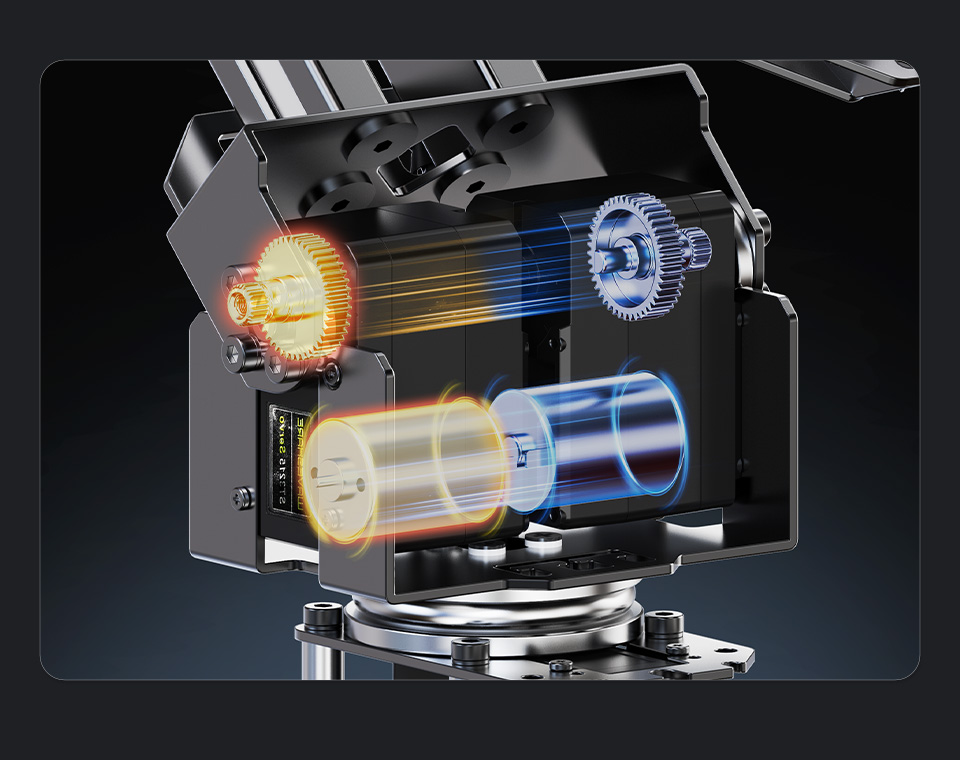
Inovativní technologie dvojitého pohonu
zdvojnásobuje točivý moment ramenního kloubu
Vyvinuli jsme algoritmus řízení s dvojitým pohonem, který umožňuje dvěma servům na ramenním kloubu efektivně koordinovat svůj výstupní točivý moment, čímž výrazně zlepšuje
výkon a celkovou nosnost série RoArm-M2
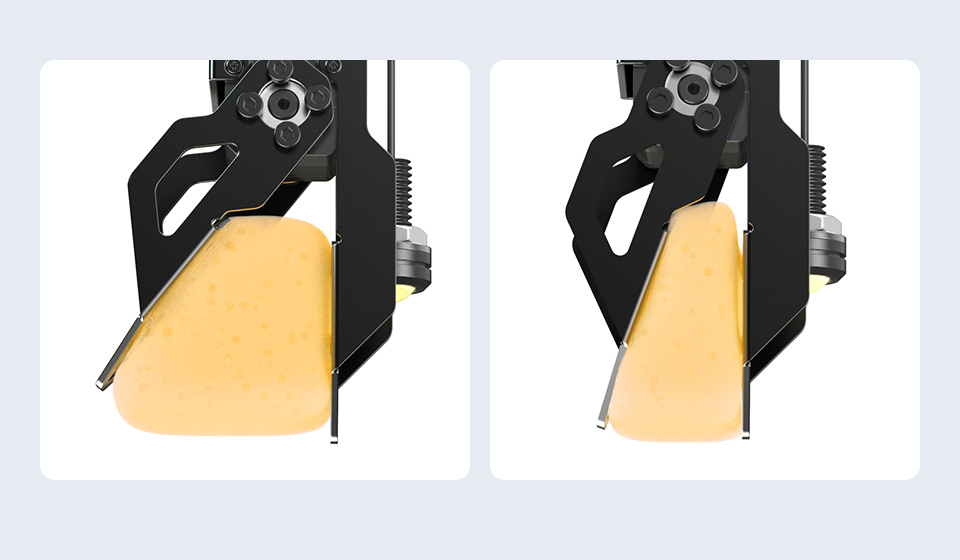
Přímý pohon svěrky umožňuje přesné
řízení síly
Přímý pohon svěrky umožňuje přesné řízení síly svěrky v programu, vhodné pro upínání jemných předmětů bez použití nadměrné síly
Podpora instalace gumových pásků
kompenzovat vliv
gravitace
Klouby RAMENO a LOKET podporují instalaci gumových pásků, které pomáhají robotickému ramenu využitím elastického smrštění gumových pásků kompenzovat vliv gravitace a zvýšit efektivní zatížení robotického ramene.
Dynamická vnější síla
adaptivní řízení
Po povolení této funkce můžete omezit maximální točivý moment pro každý kloub. Když vnější síla působící na kloub překročí prahovou hodnotu točivého momentu (nastavitelnou), robotické rameno se otočí v reakci na vnější sílu a vrátí se do zadané pozice, když vnější síla klesne pod prahovou hodnotu točivého momentu.

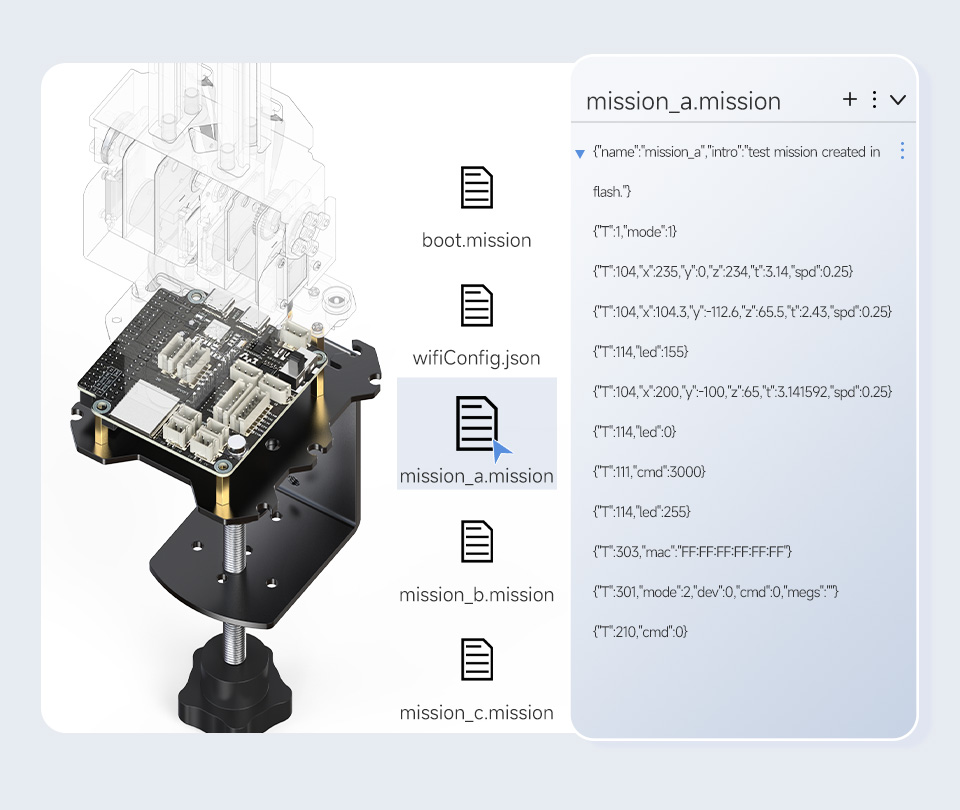
Automatické nahrávání jedním kliknutím
Snadné vytváření akcí
RoArm-M2 může ukládat JSON instrukce pro řízení robota jako soubory úloh. Tyto soubory úloh lze uložit do Flash paměti ESP32, která se neztratí při výpadku napájení. Robotické rameno může provádět složité a opakující se operace voláním těchto souborů úloh.
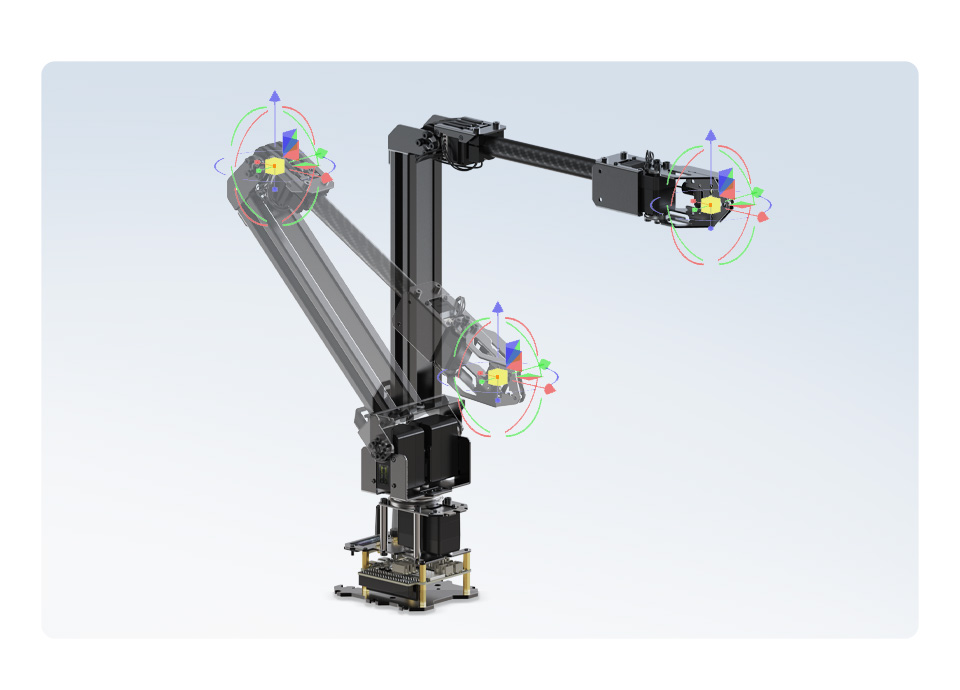
Přesně dosáhnout cíle zadáním souřadnic
Open source algoritmus řízení inverzní kinematiky v třírozměrném kartézském souřadnicovém systému. Po zadání cílové pozice může robotické rameno přesně dosáhnout cílového bodu pomocí funkce inverzní kinematiky, která vypočítá úhel natočení každého kloubu.
Řízení rychlosti křivky pro
Plynulejší pohyb
Používáme algoritmus řízení křivkové rychlosti, aby se robotická paže pohybovala plynuleji a přirozeněji, bez kmitání při startu a zastavení

Bezdrátové řízení ESP-NOW
Nízká latence pro vzdálenou spolupráci
ESP-NOW je bezdrátový komunikační protokol s nízkou latencí typu ad hoc, bez potřeby síťové infrastruktury. Můžete použít jednu robotickou paži k bezdrátovému ovládání ostatních robotických paží a metody řízení lze nastavit jako broadcast řízení, skupinové řízení a jedno-na-jedno řízení.
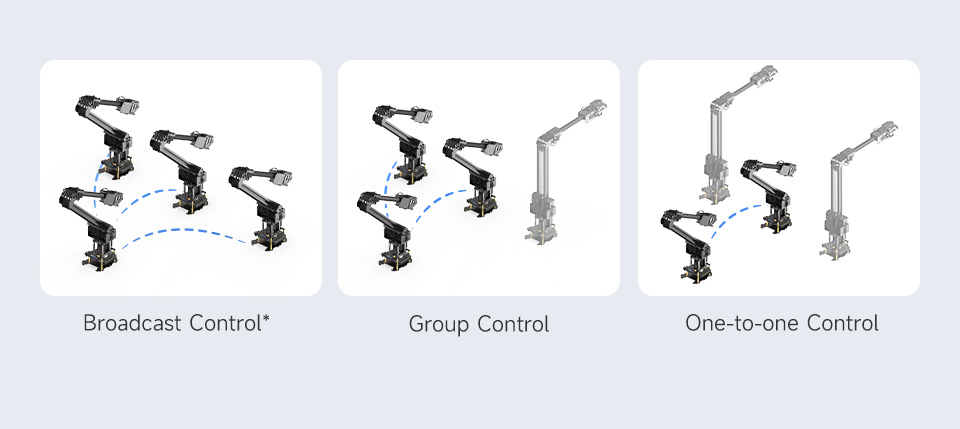
* Poznámka: Broadcast řízení nemá omezení počtu ovládaných zařízení, zatímco skupinové řízení umožňuje až 20 zařízení. Podrobnosti naleznete v WIKI.
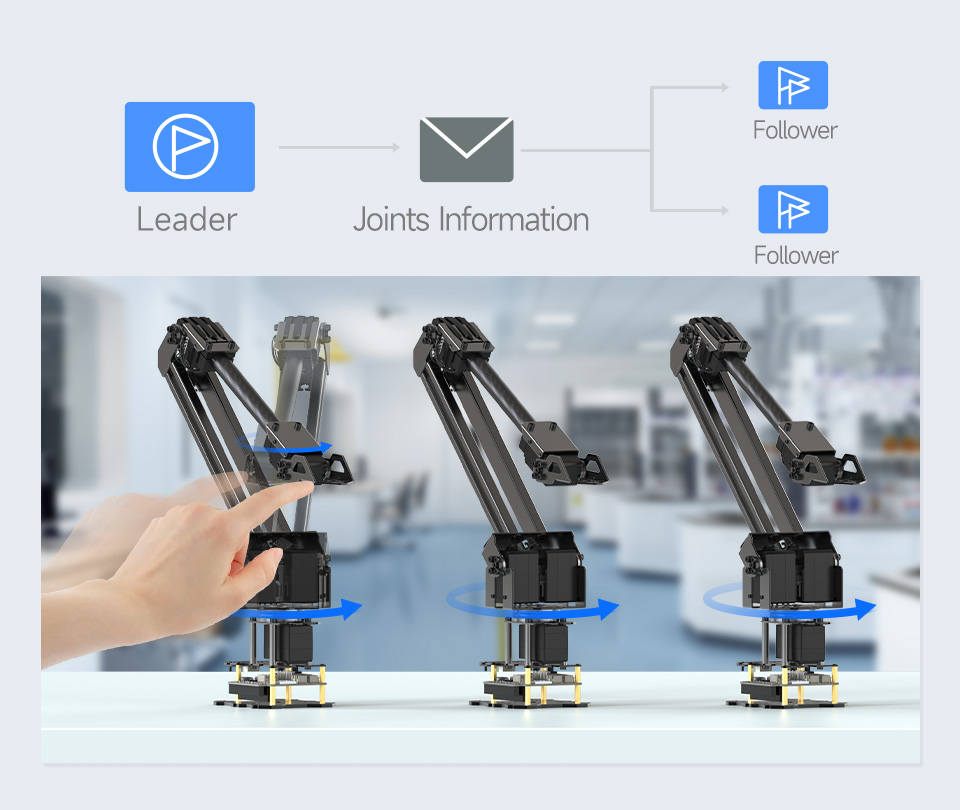
Podporuje režim řízení Vedoucí-následující založený na ESP-NOW
V režimu řízení Vedoucí-následující bude vedoucí robotická paže odesílat informace o úhlech kloubů ostatním robotickým paží prostřednictvím komunikace ESP-NOW. Ostatní robotické paže v režimu ESP-NOW Následující budou v reálném čase napodobovat stejné akce jako vedoucí.
Více ovládacích rozhraní,
Podpora více zařízení a jazyků
Řadu RoArm-M2 lze ovládat nejen pomocí webové aplikace, ale také podporuje použití jiných řadičů pro odesílání JSON příkazů přes HTTP protokol, sériovou komunikaci nebo USB komunikaci pro ovládání a získávání zpětné vazby.
Více způsobů instalace pro integraci do vaší aplikace
Poskytuje více instalačních schémat a souvisejících zdrojů pro sekundární vývoj, vhodné pro různé scénáře použití a lze je flexibilně integrovat do vašich projektů a aplikací

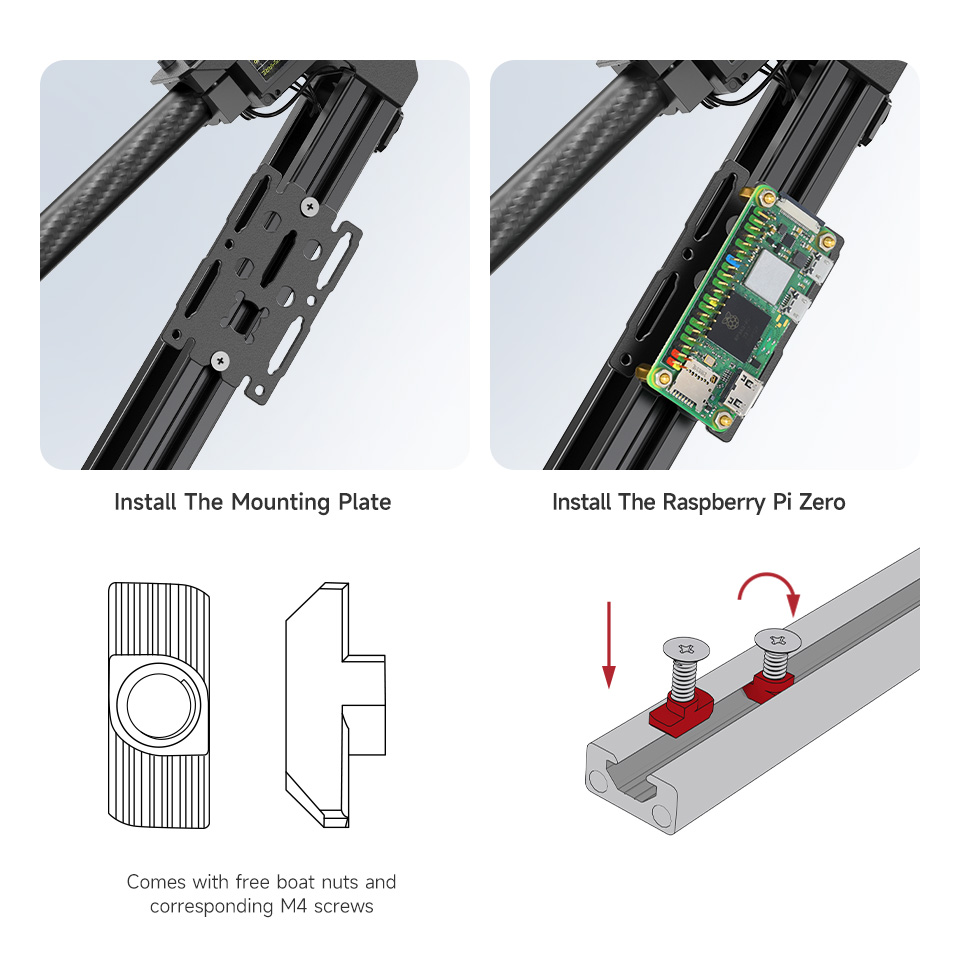
Snadná instalace různých periferií
Hlavní konstrukce horní paže používá dvě 1020 evropské standardní hliníkové lišty, podporuje instalaci dalších periferií pomocí lodních matic pro splnění různých potřeb. Dodává se s lodními maticemi a odpovídajícími šrouby M4 pro snadnou instalaci.
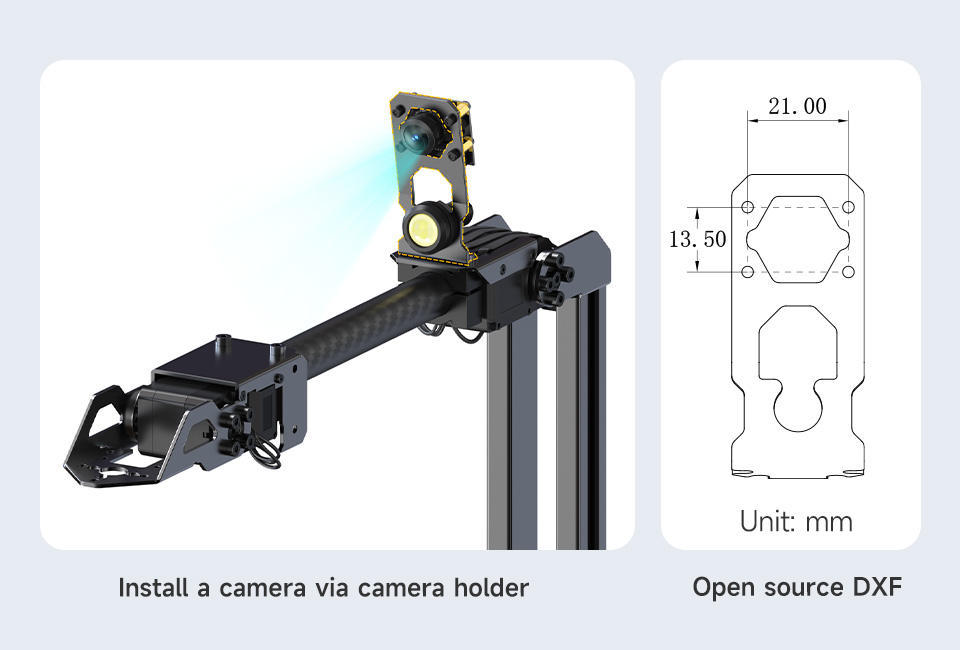
Podporuje instalaci kamery
pro rozšíření vizuálních aplikací
Dodává se s držákem kamery a otevřeným zdrojovým kódem pro související výkresy.
Můžete přímo nainstalovat kameru odpovídající velikosti nebo jiné kamery
s adaptérem
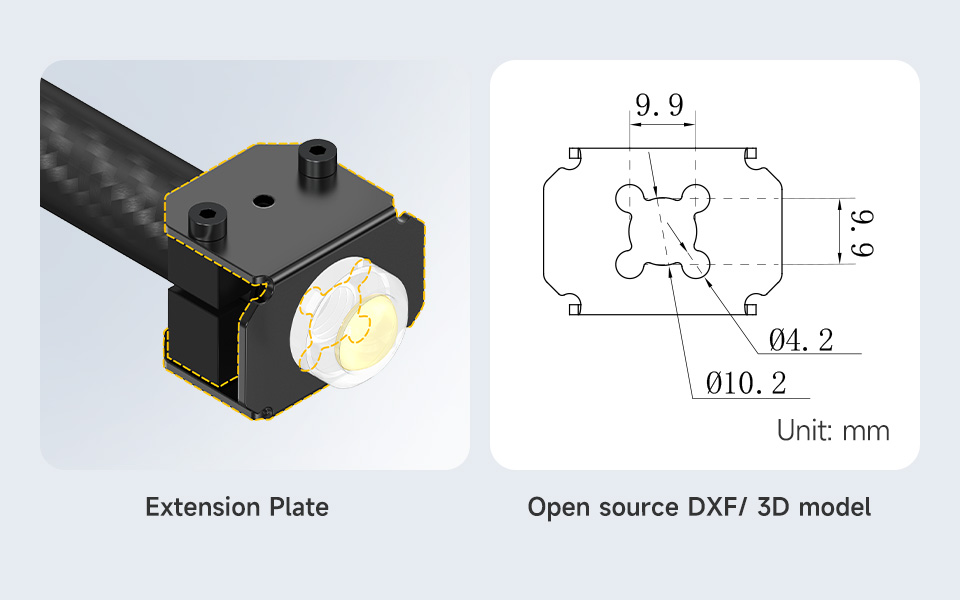
Podporuje rozšíření různých EoAT
pro více funkcí
Dodává se s rozšiřující deskou, snadné pro uživatele rozšiřovat a měnit různé EoAT
pro více funkcí
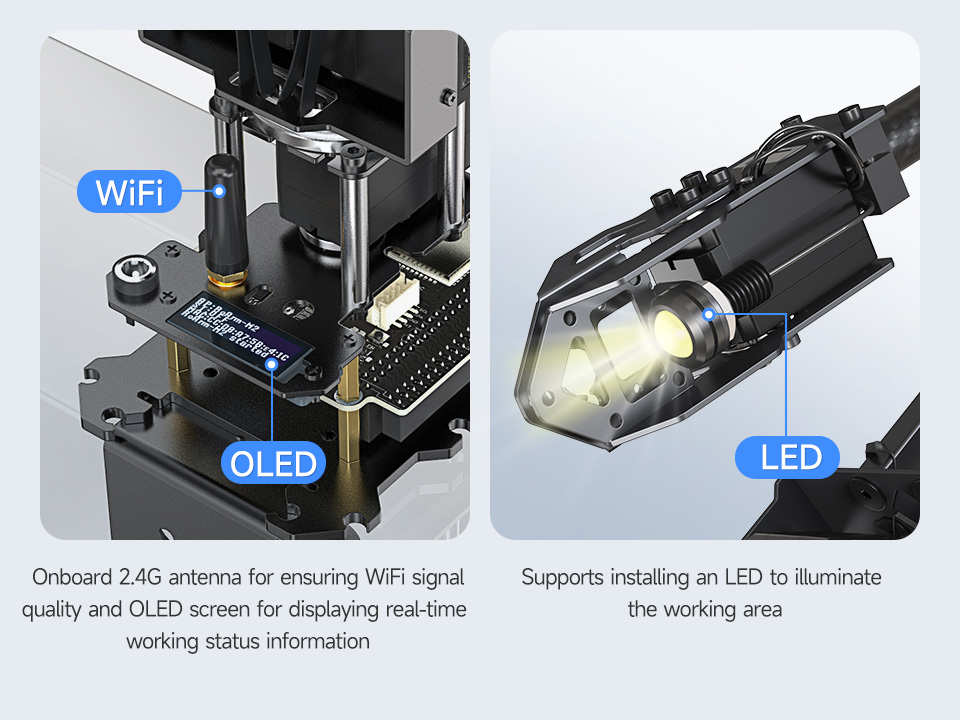
Vestavěná hlavní řídicí deska ESP32
Používá výkonný hlavní řídicí MCU ESP32, podporuje více bezdrátových komunikačních protokolů, s velkým množstvím open source zdrojů pro podporu druhotného vývoje inovativních aplikací
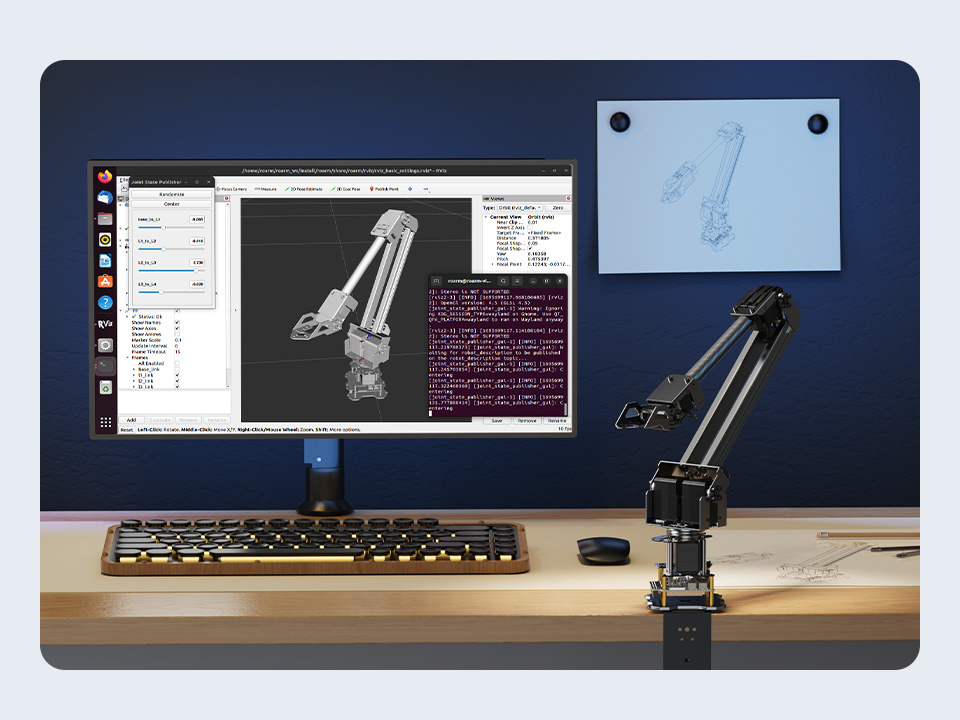
Kompatibilní s ROS2, poskytuje
soubor pro vytvoření modelu a podporuje
spolupráce více zařízení
Poskytuje komunikační uzly ROS2, soubor popisu modelu URDF a základní tutoriál ROS2
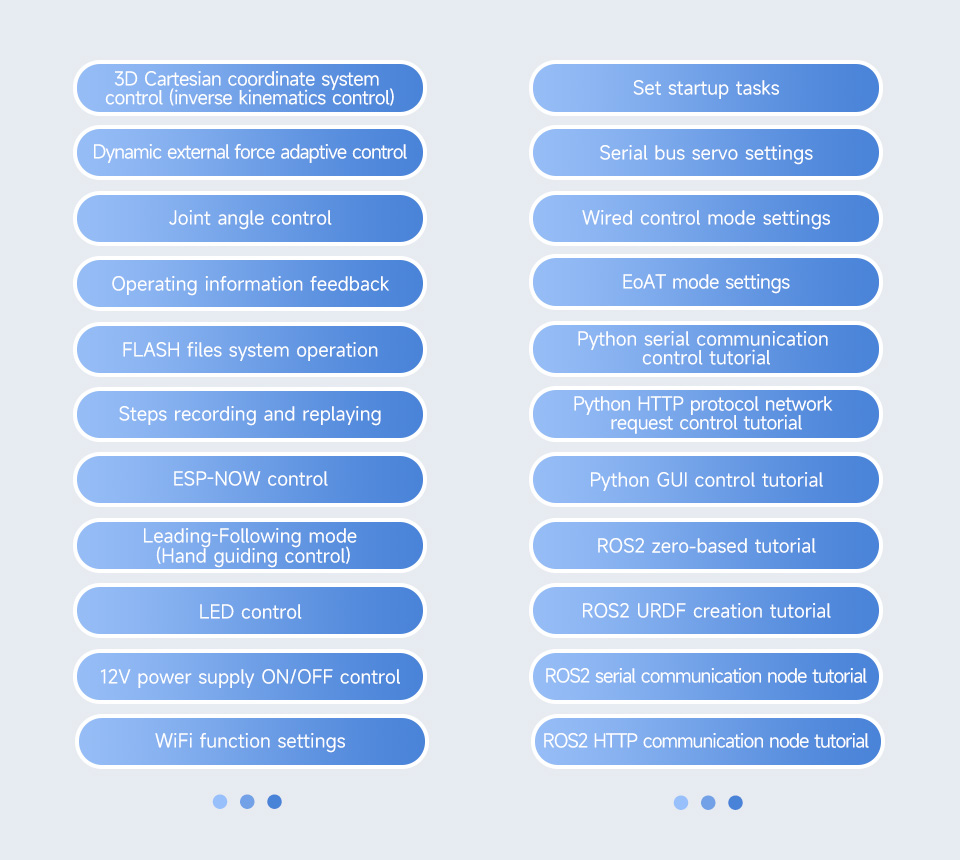
Bohaté zdroje návodů pro
druhotný vývoj
Poskytujeme kompletní návody a příklady, včetně různých funkcí a běžných aplikačních scénářů, aby uživatelé mohli rychle začít s druhotným vývojem
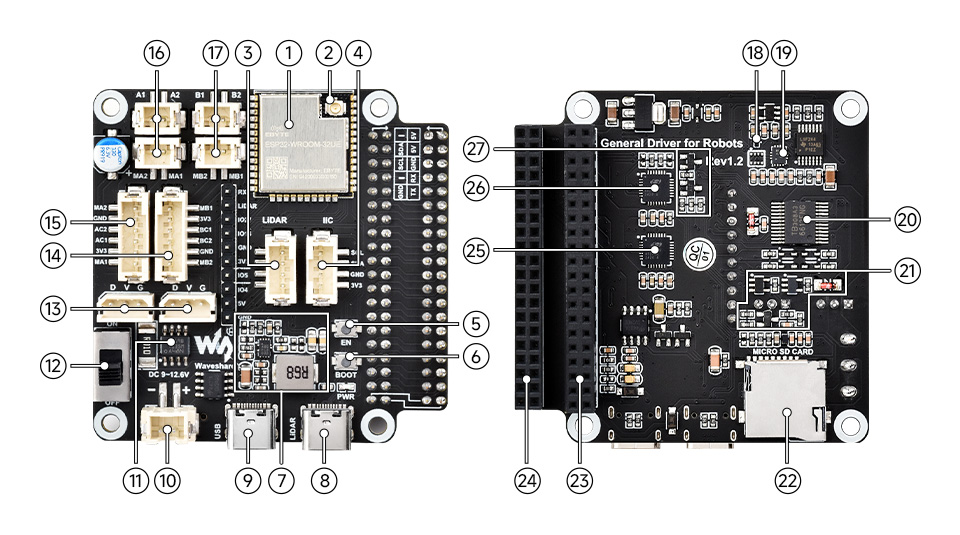
Obecná řídicí deska pro roboty
Vestavěná bohatá rozhraní a zdroje pro inovativní vývoj a rozšíření funkcí
-
Řídicí modul ESP32-WROOM-32
Lze vyvíjet pomocí Arduino IDE -
Konektor IPEX1 WIFI
Pro připojení WIFI antény ke zvýšení dosahu bezdrátové komunikace -
Rozhraní LIDAR
Integrovaná funkce radarového adaptéru -
Rozšiřující rozhraní periferní sběrnice I2C
Pro připojení k OLED displeji nebo jiným I2C senzorům -
Tlačítko reset
Stiskněte a uvolněte pro restart ESP32 -
Tlačítko pro stahování
ESP32 přejde do režimu stahování po zapnutí napájení -
DC-DC 5V regulační obvod napětí
Napájení pro hostitelské počítače jako Raspberry Pi nebo Jetson nano -
Port Type-C (LADAR)
Přenos dat LIDAR -
Port Type-C (USB)
Komunikační rozhraní ESP32, pro nahrávání programů do ESP32 -
Napájecí port XH2.54
Podpora vstupu DC 7~13V, může přímo napájet sériové sběrnicové serva a motory -
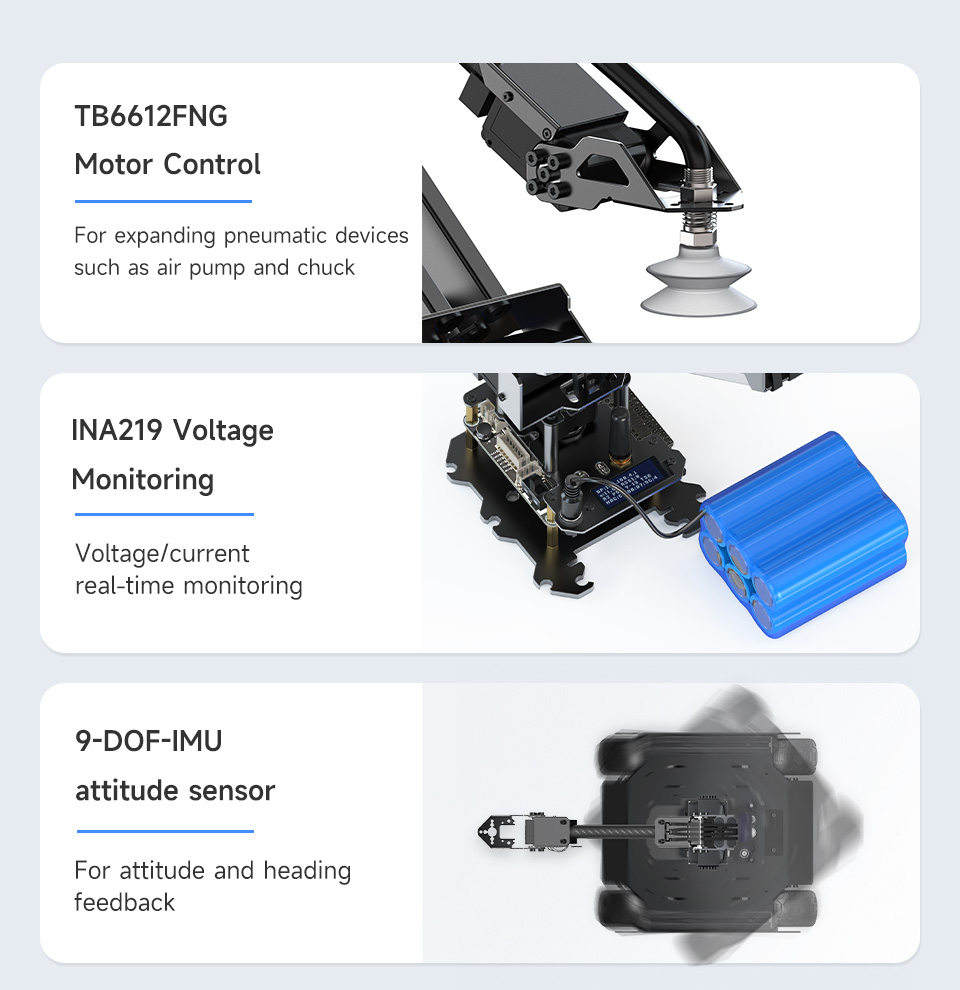
INA219
čip pro monitorování napětí/proudu -
Napájení ZAP/VYP
Vnější napájení ZAP/VYP -
Rozhraní sériového sběrnicového serva ST3215
Pro připojení k sériovému sběrnicovému servu ST3215 -
Motorové rozhraní PH2.0 6P
Rozhraní skupiny B pro motor s enkodérem
-
Motorové rozhraní PH2.0 6P
Skupina A rozhraní pro motor s enkodérem -
Motorové rozhraní PH2.0 2P
Skupina A rozhraní pro motor bez enkodéru -
Motorové rozhraní PH2.0 2P
Skupina B rozhraní pro motor bez enkodéru -
AK09918C
3osý elektronický kompas -
QMI8658C
6osý pohybový senzor -
TB6612FNG
Řídicí čip motoru -
Řídicí obvod sériové sběrnice serva
pro ovládání více ST3215 sériových sběrnicových serv a získávání zpětné vazby ze serv -
Slot pro TF kartu
Lze použít pro ukládání logů nebo konfigurací WIFI -
40PIN GPIO konektor
Pro připojení k Raspberry Pi nebo jiným hostitelským deskám -
40PIN rozšiřující konektor
Snadné použití GPIO pinů Raspberry Pi nebo jiných hostitelských desek -
CP-2102
UART na USB, pro přenos radarových dat -
CP-2102
UART na USB, pro komunikaci s ESP32 -
Automatický obvod pro stahování
Pro nahrávání programů do ESP32 bez stisknutí tlačítek EN a BOOT
Různorodé palubní zdroje
Podpora rozšíření funkcí
Integrovaný motorový ovladač TB6612FNG, monitorování napětí baterie INA219 a 9-osý
IMU senzor, podporuje rozšíření funkcí a inovace
Interakce přetažením myši
Poskytuje webové aplikace a desktopový software (open-source programy vyvinuté v Pythonu), podporuje nastavení akcí při stisknutí a uvolnění myši
pro flexibilní ovládání robotické paže

Specifikace
| DOF | 4 |
|---|---|
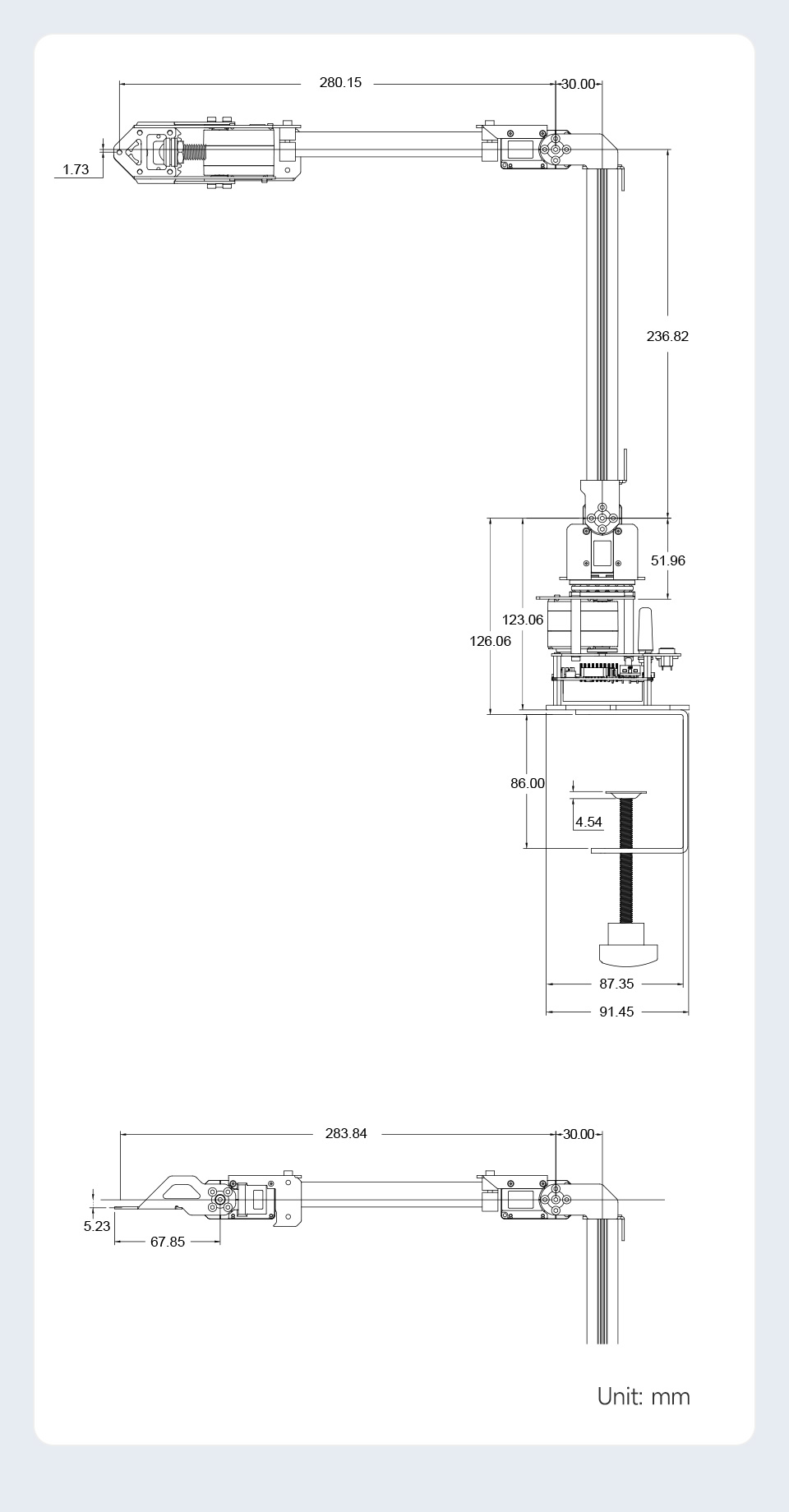
| Pracovní prostor | Horizontální průměr: 1090mm (max., 360° všesměrový), Vertikální: 798mm (max.) |
| Provozní napětí | Napájení 12V 5A, podporuje 3S Lithium baterie (NENÍ součástí balení) |
| Nosnost | 0.5kg@0.5m |
| Přesnost přemístění | ≈±4mm (při stejném zatížení) |
| Rychlost otáčení serva | 40 ot./min (bez zatížení, bez omezení točivého momentu) |
| Provozní rozsah | BASE-360°, RAMENO-180°, LOKET-180°, RUKA-135°/270° |
| Typ pohonu | TTL sériová sběrnice serv, přímý pohon kloubu |
| Počet serv | 5 |
| Snímač úhlu kloubu | 12bitový 360° magnetický enkodér |
| Točivý moment serva | 30KG.CM @12V |
| Zpětná vazba kloubu | stav serva, úhel kloubu, rychlost otáčení, zatížení kloubu, napětí serva, proud serva, teplota serva a pracovní režim serva |
| Hlavní řízení | ESP32-WROOM-32 |
| Funkce hlavního řídicího modulu | WiFi, BT, Dual Core, 240MHz |
| Bezdrátový režim ovládání | 2.4G-WiFi, ESP-NOW |
| Drátový režim ovládání | USB, UART |
| Manuální režim provozu | WEB ovládací rozhraní |
| Režim provozu hostitele | UART/USB/ESP-NOW*/HTTP komunikace přes příkazy ve formátu JSON (* nepodporuje získávání zpětné vazby při použití komunikace ESP-NOW) |
| Podpora hostitele | USB připojená zařízení včetně Raspberry Pi, Jetson Orin Nano a PC. |
| Funkce EoAT | Funkce svorky ve výchozím nastavení, lze změnit na další stupeň volnosti |
| Výkon LED | ≤1,5W |
| Velikost OLED displeje | 0.91inch |
| Další funkce | 2kanálový 12V vypínač napájení, 9-DOF IMU |
| Hmotnost robotické paže | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873,3 ±15g (nepočítaje svorku pro upevnění na hranu stolu) |
| Hmotnost svorky pro upevnění na hranu stolu | 290g ±10g |
| Podporovaná tloušťka hrany stolu pro svorku | <72mm |
| Demo | Řízení 3D kartézského souřadnicového systému (řízení inverzní kinematiky); Dynamické adaptivní řízení vnější síly; Řízení úhlu kloubu; Zpětná vazba provozních informací; Provoz systému FLASH souborů; Záznam a přehrávání kroků; Řízení ESP-NOW; Režim Vedoucí-Následující (řízení vedením rukou); Řízení LED; Řízení zapnutí/vypnutí napájení 12V; Nastavení funkcí WiFi; Nastavení úkolů při spuštění; Nastavení sériové sběrnice serv; Nastavení režimu zpětné vazby; Nastavení režimu EoAT atd. (Poznámka: Podrobnosti naleznete na WIKI) |
Ukázka produktu

Rozměry
1. Obecné informace o dopravě
- Nabízíme prémiové způsoby dopravy s číslem pro sledování u každé objednávky.
-
Dodací adresu byste měli zadat v angličtině bez speciálních znaků, aby kurýrní společnost mohla vaši adresu v systému správně rozpoznat. Zásilku odešleme podle vámi uvedené dodací adresy. Aby nedošlo ke ztrátě zásilky, informujte nás o jakékoli změně adresy před tím, než bude vaše objednávka označena jako "Odesláno".
-
Pokud potřebujete objednávku zrušit nebo změnit, okamžitě kontaktujte náš zákaznický servis. Jakmile má vaše objednávka stav "Odesláno", již ji nelze zrušit ani nijak změnit. Aby nedošlo k problémům, před dokončením nákupu si prosím znovu zkontrolujte svůj nákupní košík.
-
Můžeme odeslat všechny objednávky skladem do 1 pracovního dne, protože vaše objednávka byla potvrzena.
-
Všechny položky jsou před odesláním kontrolovány a pečlivě ručně baleny.
-
Při standardní kurýrní praxi je nutné zkontrolovat obsah balíku před podpisem převzetí zboží. Jinak nebudeme odpovědní za případné škody vzniklé během přepravy.
2. Možnosti doručení pro Německo, země EU* a USA
(Pro produkty na skladě v Mnichově, skladu v Long Beach)
2.1 Objednávky v hodnotě nepřesahující 5 €:
Možnosti dopravy:
| Možnosti doručení | Německo | EU* |
|---|---|---|
|
Deutsche Post |
€6 Doručení do 3-4 pracovních dnů |
€15 Doručení do 5-9 pracovních dnů |
| Možnosti doručení | Kontinentální USA | Mimo kontinentální USA |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Doručení do 3-7 pracovních dnů |
€8.95 Doručení do 5-9 pracovních dnů |
|
UPS Expres |
€13.95 Doručení do 2-4 pracovních dnů |
€17.95 Doručení do 3-7 pracovních dnů |
2.2 Možnosti doručení pro objednávky v hodnotě mezi 5 € a 30 € v rámci Německa, 5 € a 50 € v rámci EU nebo 5 € a 45 € v USA:*
Možnosti dopravy:
| Možnosti doručení | Německo | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Doručení do 3-4 pracovních dnů |
€6 Doručení do 5-9 pracovních dnů |
|
DHL Paket |
€6 Doručení do 2-3 pracovních dnů |
€15 Doručení do 3-7 pracovních dnů |
|
DHL Express |
€14 Doručení do 1-2 pracovních dnů |
€65 Doručení do 2-3 pracovních dnů |
| Možnosti doručení | Kontinentální USA | Mimo kontinentální USA |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Doručení do 3-7 pracovních dnů |
€6.95 Doručení do 5-9 pracovních dnů |
|
UPS Expres |
€11.95 Doručení do 2-4 pracovních dnů |
€13.95 Doručení do 3-7 pracovních dnů |
2.3 Možnosti bezplatného doručení pro objednávky nad 30 € v rámci Německa, 50 € v rámci EU* nebo 45 € v USA:
| Možnosti bezplatného doručení | Německo | EU* |
|---|---|---|
|
Deutsche Post |
Zdarma nad 30 € | Zdarma nad 50 € |
|
DHL Paket |
+ 2 € za objednávky nad 30 € / Zdarma nad 60 € | + 8 € nad 50 € / Zdarma nad 80 € |
|
DHL Express |
+ 10 € nad 30 € | + 60 € nad 50 € |
| Možnosti bezplatného doručení | Kontinentální USA | Mimo kontinentální USA |
|---|---|---|
|
USPS Ground Advantage |
Zdarma nad 45 € | Zdarma nad 60 € |
|
UPS Expres |
+ 8,95 € nad 45 € | + 11,95 € nad 45 € |
-
Některé země EU nejsou zahrnuty v naší definici EU zóny: Velká Británie (s výjimkou Irska), Švýcarsko, Lichtenštejnsko, Vatikán, Albánie, Bělorusko, Norsko, Ukrajina a Island. Pro výše uvedené země platí Pravidlo mezinárodní přepravy.
- Regiony v Mimo kontinentální USA zahrnují: Aljaška, Americká Samoa, Guam, Havaj, ten Marshallovy ostrovy, ten Severní Mariany, Palau, Portoriku, ten Panenským ostrovům USA, ten ozbrojeným silám Ameriky, ten ozbrojeným silám v Evropě, ten ozbrojeným silám v Pacifiku, a odlehlým ostrovům USA. Doprava a doručení do těchto oblastí podléhá Pravidla dopravy do nepevninských oblastí USA.
2.4 Možnosti dopravy do mezinárodních zemí:
(přes Deutsche Post nebo YunExpress)
| Výše objednávky | Mezinárodní |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| 50 € a více | €4 |
Důležité upozornění:
- Před zadáním objednávky si prosím ověřte umístění zásob na stránce produktu, abyste potvrdili dodací lhůty.
- Pro produkty ve skladu v Shenzhen obvykle nejprve odešleme produkty ze skladu v Shenzhen do našeho skladu v Mnichově nebo Long Beach, což trvá přibližně 1,5 týdne. Po obdržení zásilky v Mnichově/Long Beach vám zboží zašleme. Dopravu YunExpress ze Shenzhen zajistíme pouze u objednávek s produkty ve skladu v Shenzhen v hodnotě nad 50 €.
- Pokud pokud zadáte objednávku s produkty ze skladů v Mnichově i Shenzhen, nejprve odešleme produkty ze skladu v Mnichově a poté vám zašleme zbývající produkty, jakmile je obdržíme ze Shenzhen.
3. Mezinárodní sklad
3.1 Německý sklad
3.2 Americký sklad
3.3 Čínský sklad
4. Clo a daně
4.1 Jak OpenELAB řeší clo při dovozu nebo vývozu?
4.2 Jak je účtována DPH, když zákazník zadá objednávku u OpenELAB?
4.3 Jaký druh poplatku bude účtován kromě DPH?
Datum účinnosti: 7. srpna 2025
Ve společnosti OpenELAB se zavazujeme poskytovat přesné popisy produktů a dodávat vysoce kvalitní výrobky. Pokud máte s nákupem jakékoli potíže, informujte nás prosím do 30 dnů od data odeslání.
1. Zřeknutí se záruky
Pokud není výslovně uvedeno v konkrétní smlouvě nebo objednávce, OpenELAB neposkytuje žádné záruky – výslovné ani předpokládané – ohledně vhodnosti, použitelnosti nebo obchodovatelnosti jakéhokoli produktu pro konkrétní účel nebo speciální použití.
2. Záruční politika
Záruční doba
Standardní záruční doba pro produkty prodávané společností OpenELAB je 12 měsíců od data dodání.
V rámci této záruky se OpenELAB rozumně snaží opravit nebo vyměnit produkty zdarma, pokud jsou vady způsobeny problémy se surovinami, designem nebo výrobou.
Pokud vada spadá pod tuto politiku, ale není kryta, mohou být účtovány přiměřené náklady na opravu nebo výměnu.
Po uplynutí záruční doby může být podpora stále dostupná za přiměřený poplatek.
Výjimky ze záruky
Záruka se nevztahuje na následující případy:
- Produkt je mimo 12měsíční záruční dobu.
- Poškození způsobené nesprávným použitím, nevhodnou údržbou nebo skladováním, nebo nedodržením uživatelské příručky či manuálu.
- Problémy způsobené událostmi vyšší moci (např. přírodní katastrofy, válka, právní změny apod.).
- Neoprávněné pokusy o opravu zákazníkem.
- Produkt není vadný, ale byl otevřen a podle pravidel není vratný.
3. Vrácení a refundace
Pokud nejste s nákupem spokojeni, můžete mít nárok na vrácení nebo výměnu:
- Vrácení pro refundaci: Do 15 dnů od obdržení (neotevřené).
- Vrácení pro výměnu: Do 30 dnů od obdržení (poškozené nebo vadné).
- Okno pro výměnu: Až do 30 dnů od obdržení.
Prosím, napište nám na e-mail info@openelab.io pro autorizaci vrácení před odesláním čehokoli zpět.
Podmínky vrácení
- Položky musí být v původním, čistém a perfektním stavu s neporušeným obalem.
- Vrácení poškozených, použitých, poškrábaných, upravených nebo naprogramovaných položek nebude přijato.
- Přiložte účtenku, krátkou poznámku s vaším jménem, číslem objednávky a důvodem vrácení.
Doprava a poplatky
- Zákazníci jsou odpovědní za zpětné zaslání do našich skladů v Evropě, USA nebo Číně.
- Pokud je vrácení požadováno z důvodu zákazníka (např. změna názoru, nesprávná objednávka atd.), bude z částky vrácení odečtena jak původní cena dopravy , tak náklady na zpětné zaslání .
- Pro vrácení z důvodu zákazníka vygenerujeme a poskytneme štítek pro zpětné zaslání.
Poplatky platebních platforem
U všech vrácení požadovaných z důvodu zákazníka bude z částky vrácení odečten standardní servisní poplatek, který účtují platební platformy. Konkrétní poplatky jsou následující:
Shopify Payments: 1,8 % + 0,3 €
PayPal: 4,4 %
