



















































































































Waveshare Högvridmoment Seriebuss Servo RoArm-M2 Skrivbordsrobotarm Kit
Pre-order
Fri frakt från 30€ i Tyskland, 50€ inom EU!
- Förbeställningar skickas inom 5 arbetsdagar.
- Leveranstid till EU- och USA-länder: 10 arbetsdagar.
- Leveranstid till andra länder: 15 arbetsdagar.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Waveshare Högvridmoment Seriebuss Servo RoArm-M2 Skrivbordsrobotarm Kit
RoArm-M2
4-DOF högvridmoment seriebuss-servorobotarm
Stöder flexibel expansion och sekundär utveckling

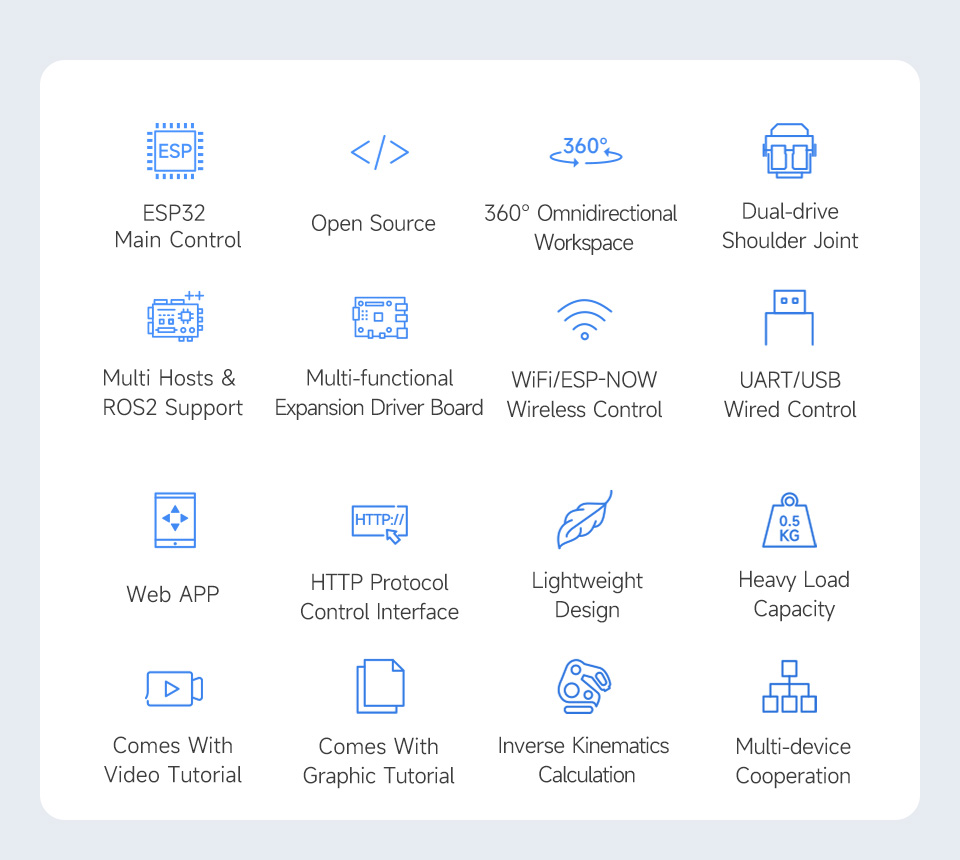
Funktioner i korthet
RoArm-M2-serien är en 4DOF smart robotarm designad för innovativa applikationer. Den använder en lättviktsstruktur med en totalvikt på mindre än 900g och en effektiv nyttolast på [email protected], och kan monteras flexibelt på olika mobila plattformar. Den använder en 360° allriktad bas kombinerad med tre flexibla leder för att skapa en arbetsyta med en diameter på 1 meter.
Den ledade direktdrivna designen förbättrar positionsprecisionen och ökar även den strukturella tillförlitligheten, med innovativ dubbeldrivningsteknologi som fördubblar axelledens vridmoment. Ombord finns en ESP32 MCU huvudkontrollmodul som stöder flera trådlösa styrningslägen, tillhandahåller styrgränssnitt och rika kommunikationsprotokoll för enkel anslutning till olika enheter.
Erbjuder en användarvänlig och plattformsoberoende WEB-applikation som integrerar ett enkelt och visualiserat koordinatstyrningsläge, vilket gör det lättare att komma igång. Levereras med rika grafiska och videoguider för att hjälpa dig att snabbt lära dig och använda den. Kompatibel med ROS2 och olika värddatorer, stöder olika trådlösa och trådbundna kommunikationslägen. Levereras med en expansionsplatta, stöder anpassning av EoAT (End of Arm Tooling) för att möta innovativa applikationskrav.
RoArm-M2-serien uppnår en utmärkt balans mellan lättvikt, användarvänlighet, utbyggbarhet och öppen innovation. Det är en multifunktionell robotarm som integrerar intelligent styrning, människa-maskin-interaktion och anpassningsbar utveckling. Idealisk för applikationer som kräver en kombination av flexibilitet, utbyggbarhet och användarvänlighet.
Versionsalternativ.
Erbjuder alternativ för RoArm-M2-S / RoArm-M2-Pro. Den uppgraderade versionen RoArm-M2-Pro är utrustad med helmetall ST3235 buss-servon, vilket ger en mer robust kropp och stabilt spel som inte ökar med användning, vilket förbättrar produktens hållbarhet.

Parametervärdesjämförelse
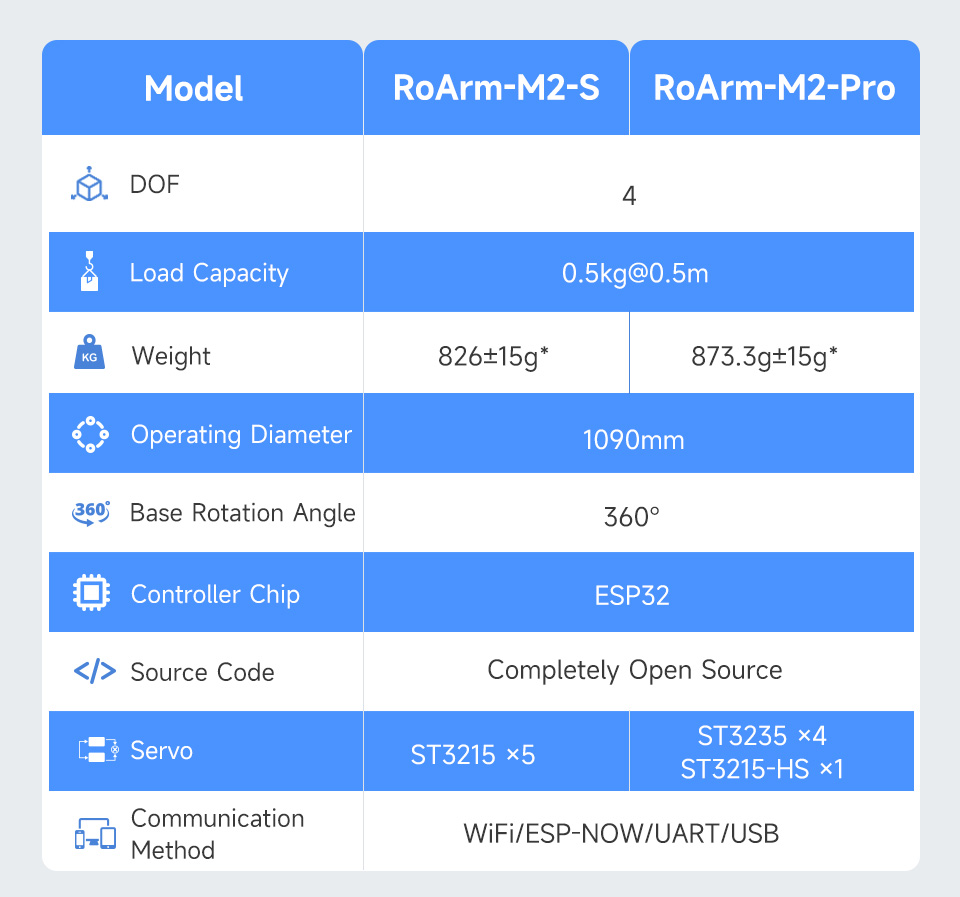
* Inkluderar inte vikten av bordskantsfästklämman (290g).
Flera EoAT monteringsmetoder
EoAT stöder olika monteringsmetoder, kan användas som en klämma eller som den fjärde frihetsgraden. Erbjuder öppen källkod DXF och 3D-modeller för DIY och sekundärutveckling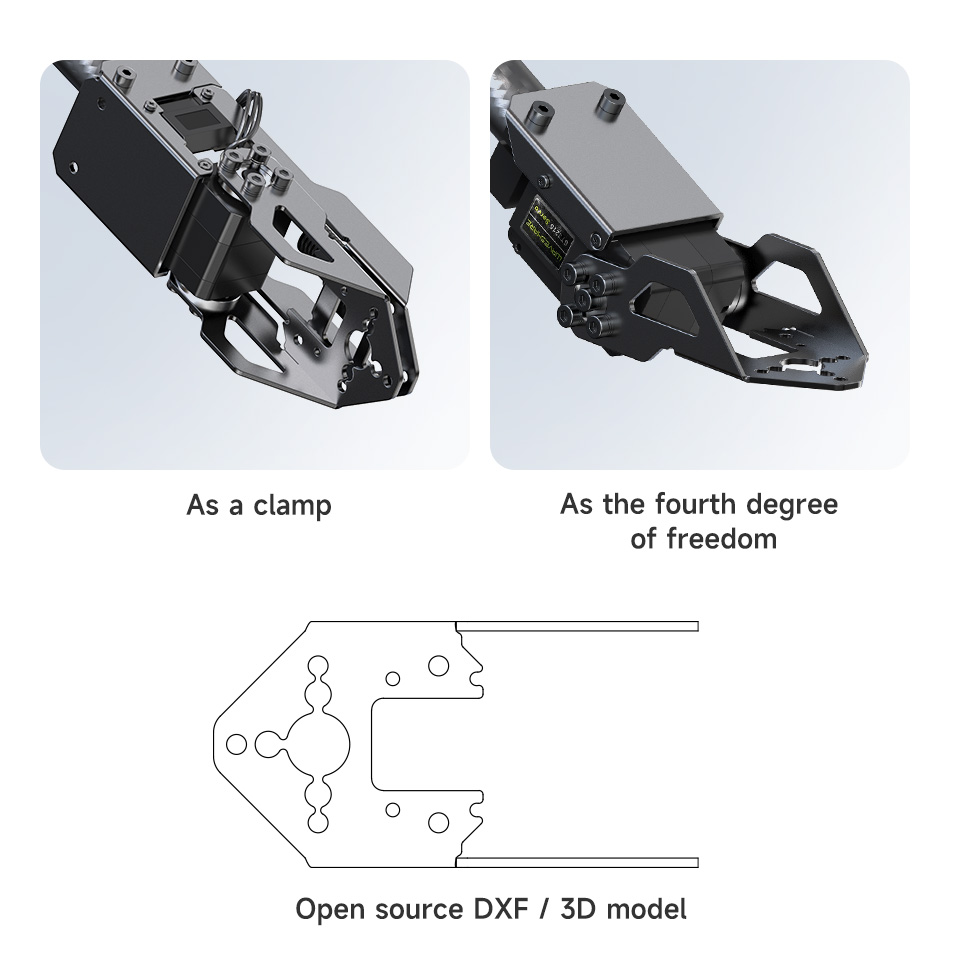
Flexibla leder × allriktat utrymme
Använder 360° rotationsbas och flexibla leder för att skapa ett allriktat arbetsutrymme med en diameter på 1 meter, vilket tillåter EoAT att röra sig fritt i alla riktningar
Lätt att styra via
Plattformsoberoende webbapplikation
Ingen appinstallation krävs, åtkomst efter att ha angett adressen. Gör det möjligt för användare att ansluta och styra RoArm-M2 via mobiltelefoner, surfplattor och datorer genom att klicka på knapparna i webbappen. Stöder sekundärutveckling av denna öppen källkods webbapp för att anpassa användargränssnittet och lägga till nya funktioner.
Helt öppen källkod för
sekundär utveckling
Helt öppen källkod för styrkoder och kommunikationsgränssnitts-dokument för Roarm-M2-serien, stöder flera språk och enheter för sekundärutveckling. Erbjuder modulära demos och handledningar för nybörjare, lätt att komma igång.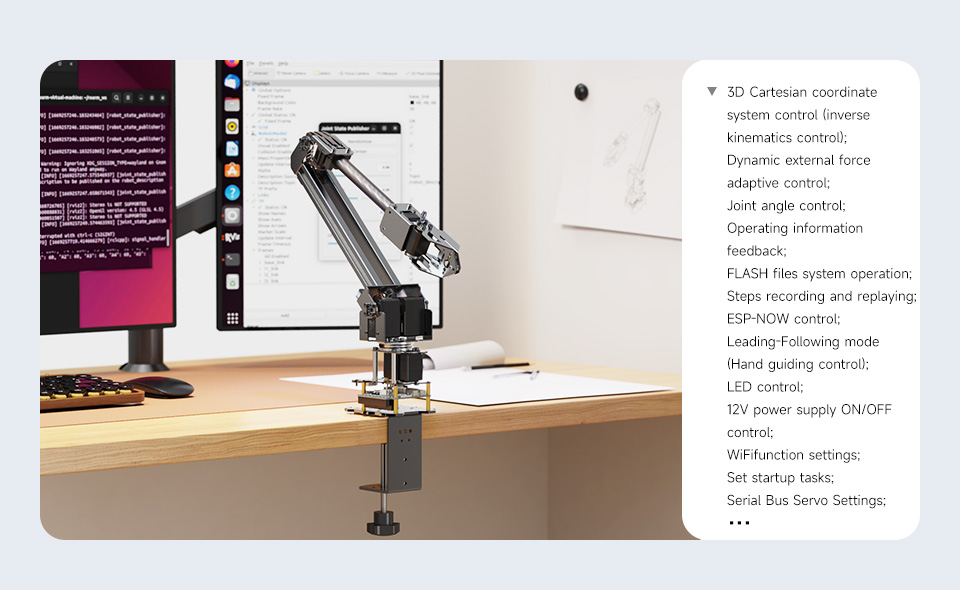
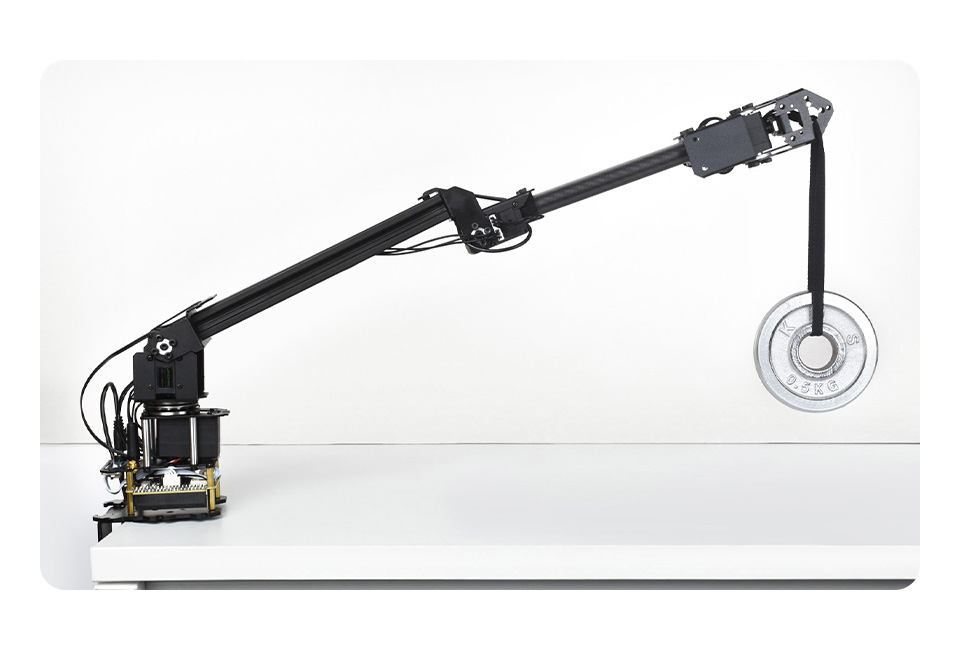
Lätt kropp, utmärkt lastkapacitet
lätt kropp med en totalvikt på mindre än 900g, använder kolfiber
och 5052 aluminiumlegering för att säkerställa stabilitet under tunga laster,
lämplig för olika mobila robotchassin

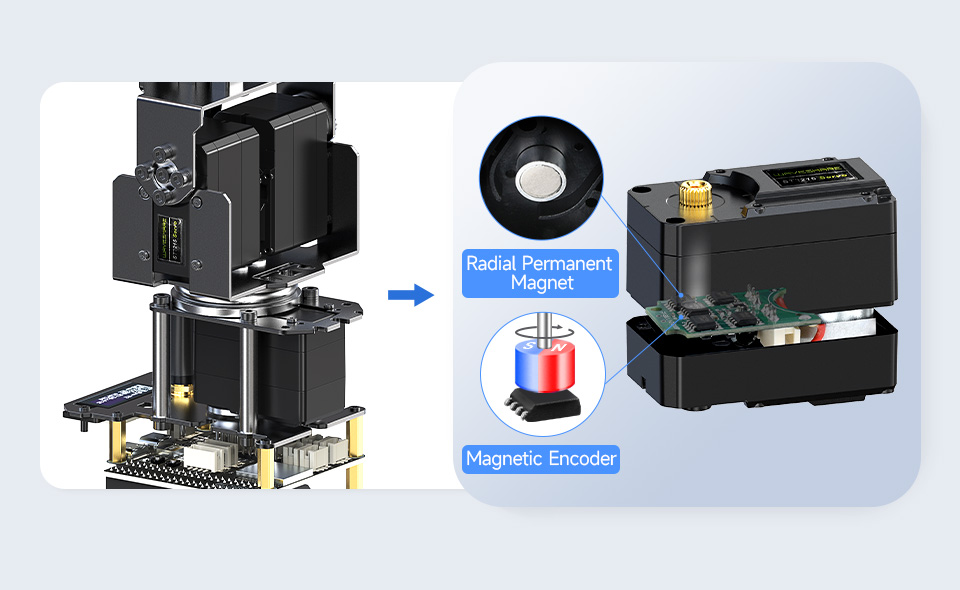
Led direktdrivningsdesign
Återkopplingsprecision upp till 0,088°
Ledvinkelåterkoppling kan erhållas direkt via en 12-bitars högprecisions magnetisk encoder utan några reduktionsgrupper, vilket är mer exakt, och den faktiska positionen för den aktuella målpositionen kan beräknas baserat på ledvinkelåterkopplingen.
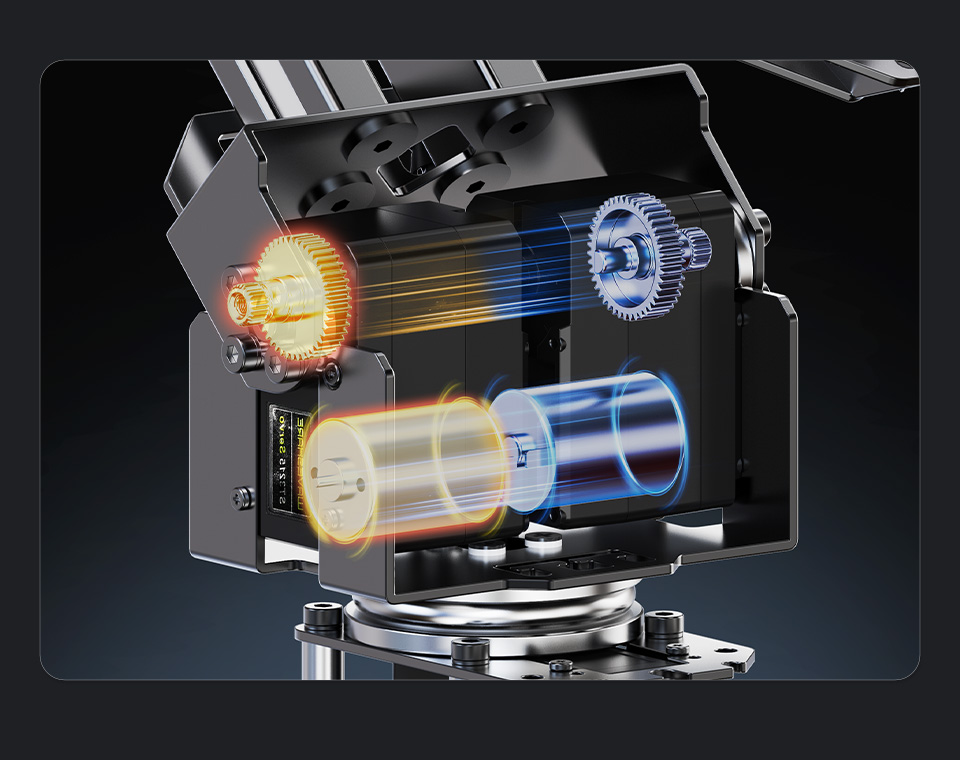
Innovativ dubbeldrivningsteknologi
fördubblar skulderledens vridmoment
Vi har utvecklat en dubbeldriven styralgoritm som gör att de två servona vid skulderleden effektivt kan samordna sitt utgående vridmoment, vilket avsevärt förbättrar
kraften och den totala lastkapaciteten för RoArm-M2-serien
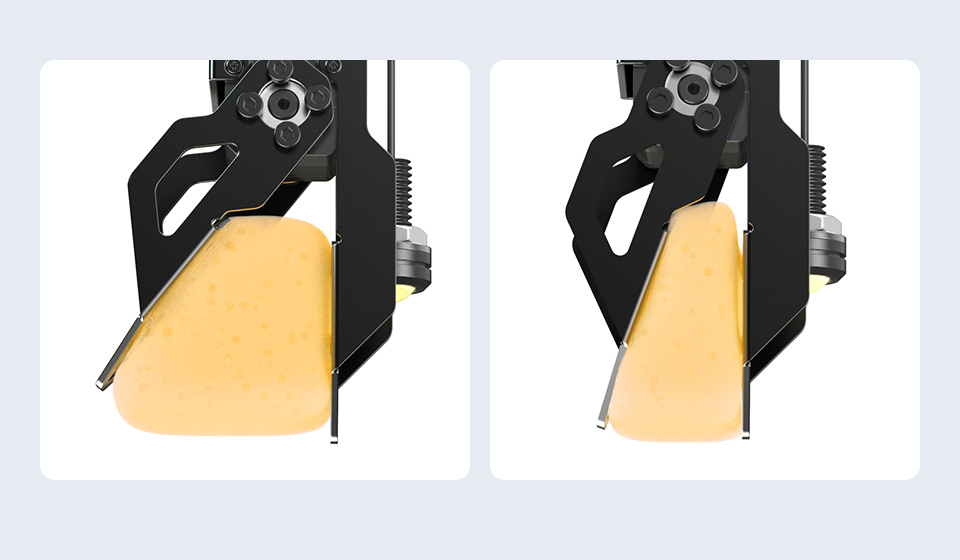
Direktdriven klämma möjliggör exakt
kraftkontroll
Den direktdrivna klämman möjliggör exakt kontroll av klämkraften i programmet, lämplig för att klämma ömtåliga föremål utan att applicera överdriven kraft
Stöder installation av gummiband
för att kompensera påverkan
av gravitation
SKULDER- och ARMBÅGSlederna stödjer installation av gummiband för att assistera robotarmen, genom att utnyttja gummibandens elastiska sammandragning för att kompensera för gravitationens påverkan och öka robotarmens effektiva last.
Dynamisk yttre kraft
adaptiv kontroll
Efter att ha aktiverat denna funktion kan du begränsa maximalt vridmoment för varje led. När den yttre kraften som appliceras på leden överstiger vridmomenttröskeln (konfigurerbar), roterar robotarmen som svar på den yttre kraften och återgår till den angivna positionen när den yttre kraften minskar under vridmomenttröskeln.

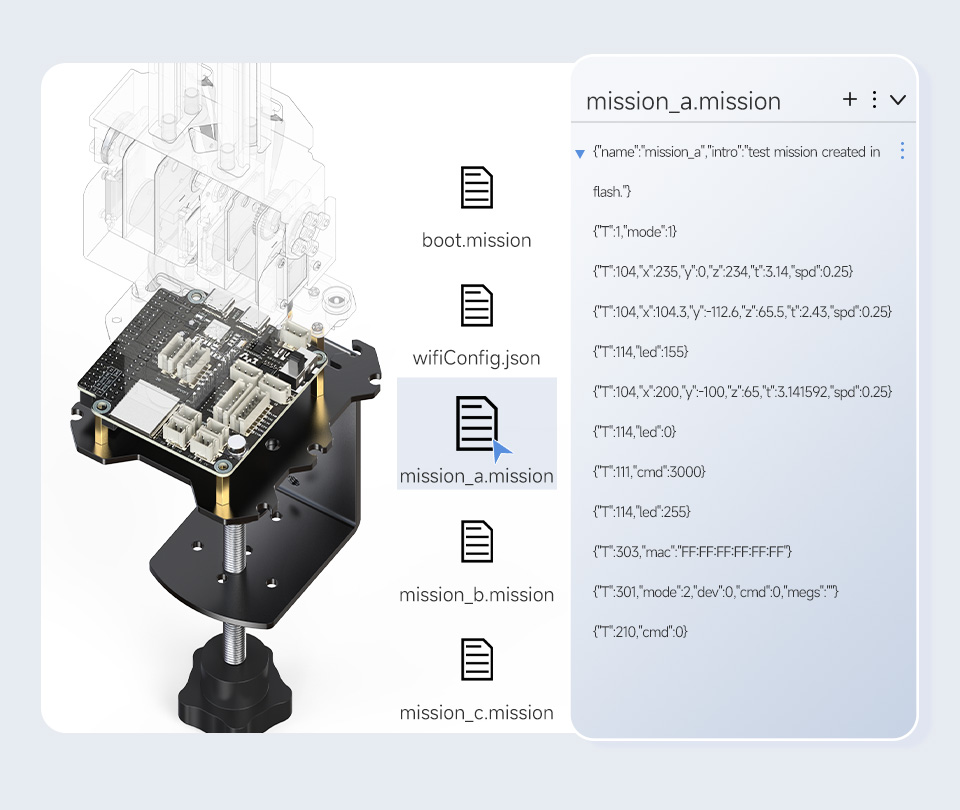
Automatisk inspelning med ett klick
Lätt att skapa åtgärder
RoArm-M2 kan spara JSON-instruktioner för robotstyrning som uppgiftsfiler. Uppgiftsfilerna kan sparas i ESP32:s Flash, vilket inte förloras vid strömavbrott. Robotarmen kan utföra komplexa och repetitiva operationer genom att anropa dessa uppgiftsfiler.
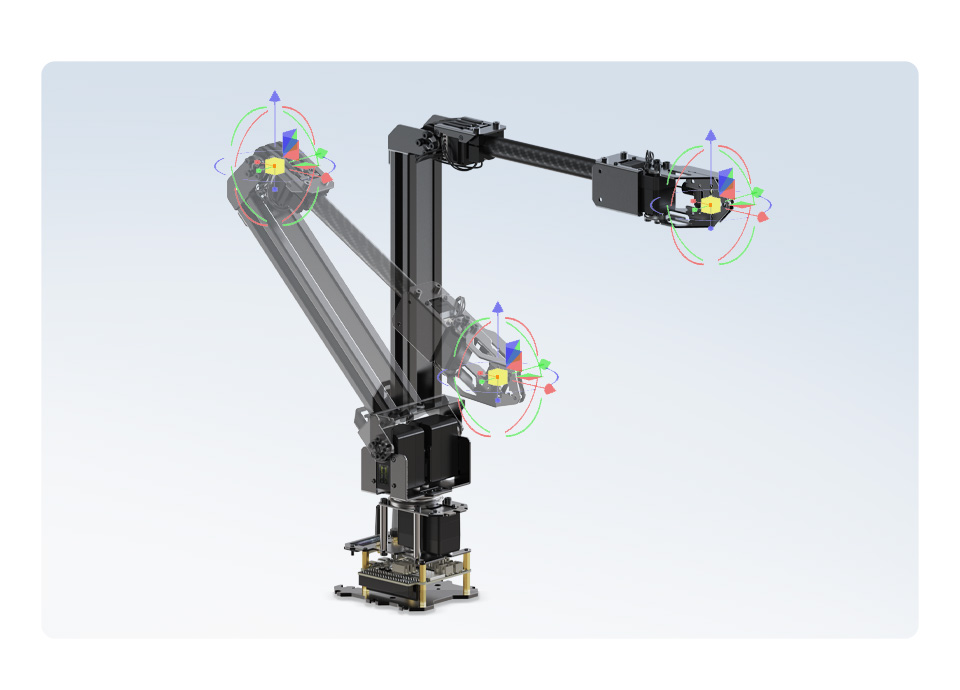
Nå exakt mål genom att ange koordinaterna
Öppen källkod för invers kinematikstyrningsalgoritm i det tredimensionella kartesiska koordinatsystemet. Efter att ha angett målpositionen kan robotarmen exakt nå målpunkt genom att använda invers kinematikfunktionen för att beräkna rotationsvinkeln för varje led.
Kurvhastighetskontroll för
Mjukare rörelse
Vi använder kurvhastighetsstyrningsalgoritmen för att få robotarmen att röra sig mjukare och mer naturligt, utan svängningar vid start och stopp

ESP-NOW trådlös styrning
Lågfördröjnings fjärrsamarbete
ESP-NOW är ett lågfördröjningsprotokoll för ad hoc trådlös kommunikation, utan behov av nätverksinfrastruktur. Du kan använda en robotarm för att trådlöst styra andra robotarmar, och styrmetoderna kan ställas in som sändningsstyrning, gruppstyrning och en-till-en styrning.
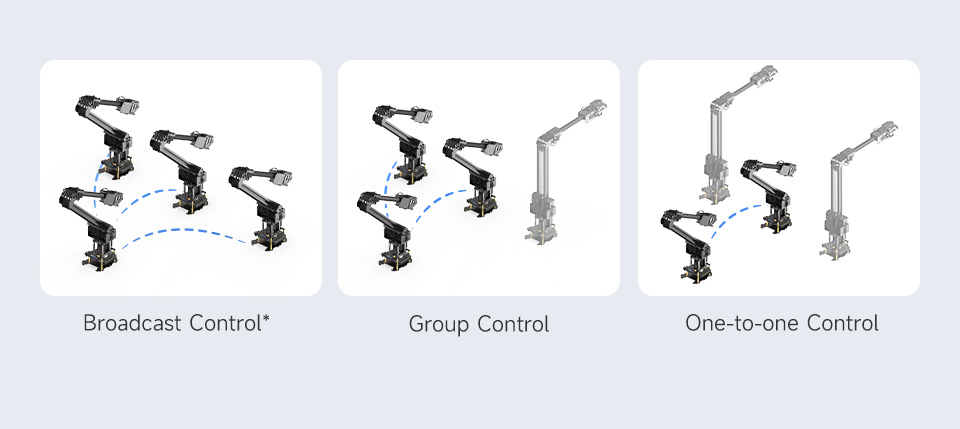
* Obs: Sändningsstyrningen har ingen begränsning för antalet styrda enheter, medan gruppstyrningen tillåter upp till 20 enheter. Vänligen se WIKI för mer information.
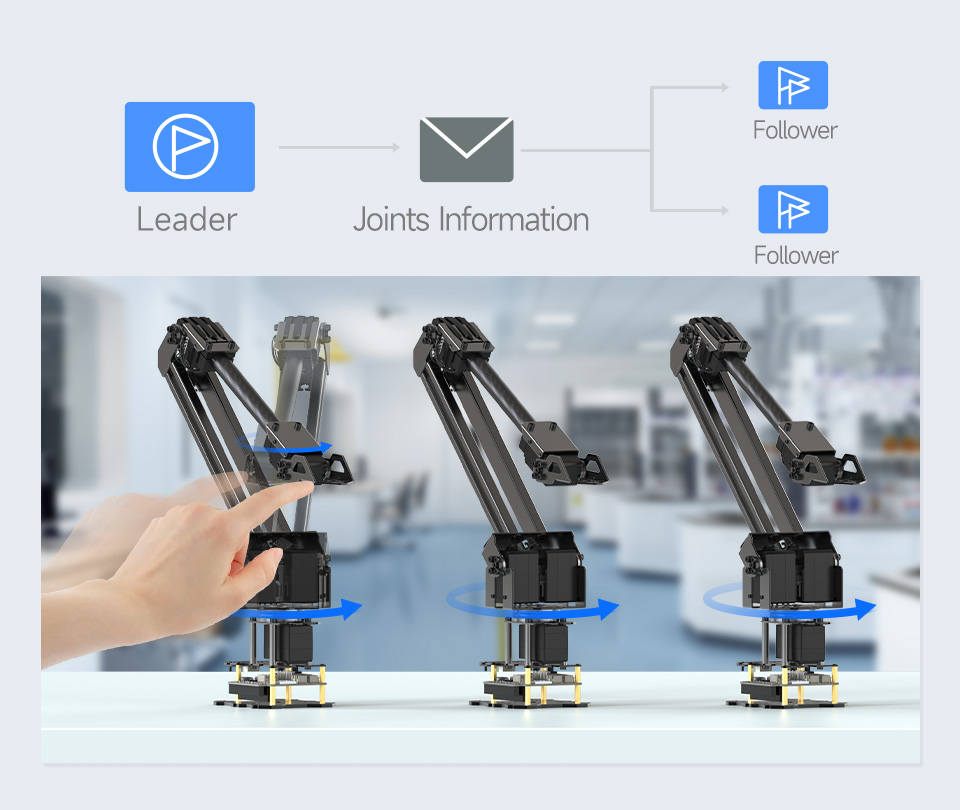
Stöder ledar-följare styrningsläge baserat på ESP-NOW
I ledar-följare styrningsläge skickar ledarrobotarmen sin ledvinkelinformation till andra robotarmar via ESP-NOW-kommunikation. De andra robotarmarna som är i ESP-NOW följarläge imiterar samma rörelser som ledaren i realtid.
Flera kontrollgränssnitt,
Stöd för flera enheter och språk
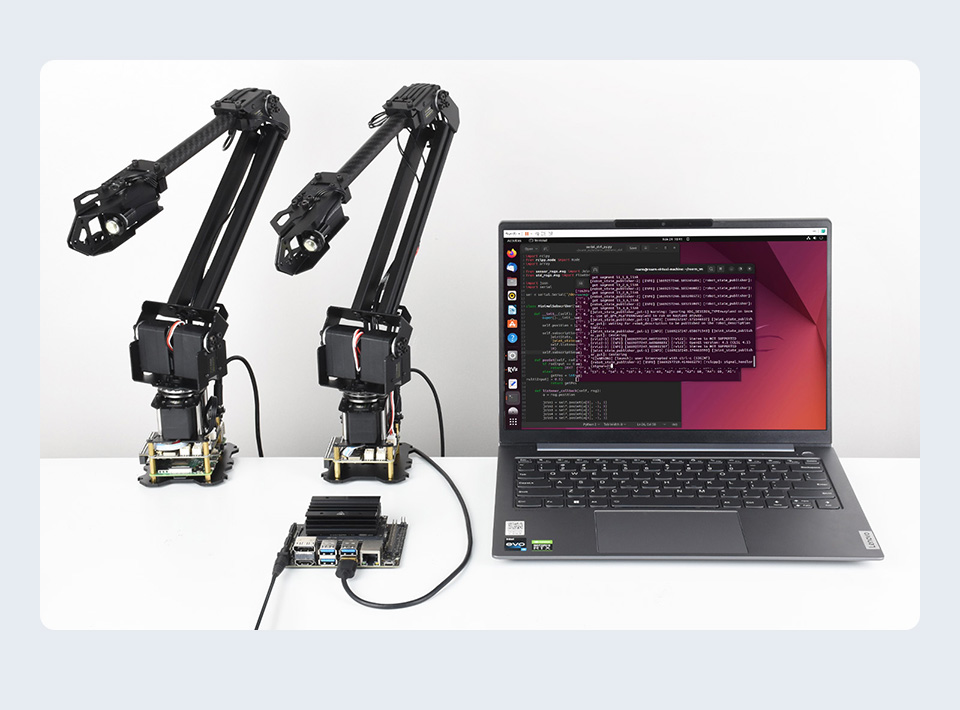
RoArm-M2-serien kan styras inte bara via WEB-applikationen, utan stöder även användning av andra kontroller för att skicka JSON-kommandon via HTTP-protokoll nätverksförfrågan, seriell kommunikation eller USB-kommunikation för styrning och återkoppling.
Flera installationsmetoder för integration i din applikation
Erbjuder flera installationsscheman och relaterade resurser för sekundärutveckling, lämpliga för olika användningsscenarier och kan flexibelt integreras i dina projekt och applikationer

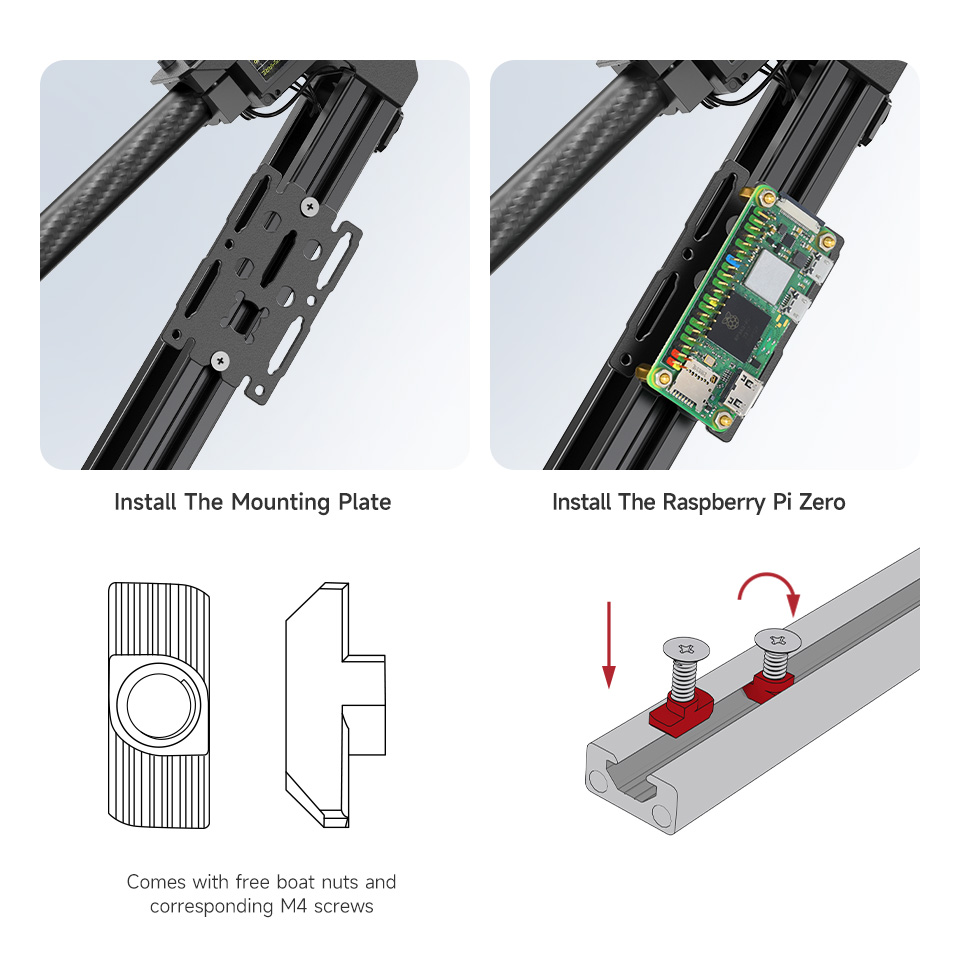
Lätt att installera olika kringutrustningar
Huvudstrukturen på överarmen använder två 1020 europeiska standard aluminiumskenor, stöder installation av ytterligare kringutrustning via båtmuttrar för att möta olika behov. Levereras med båtmuttrar och motsvarande M4-skruvar för enkel installation.
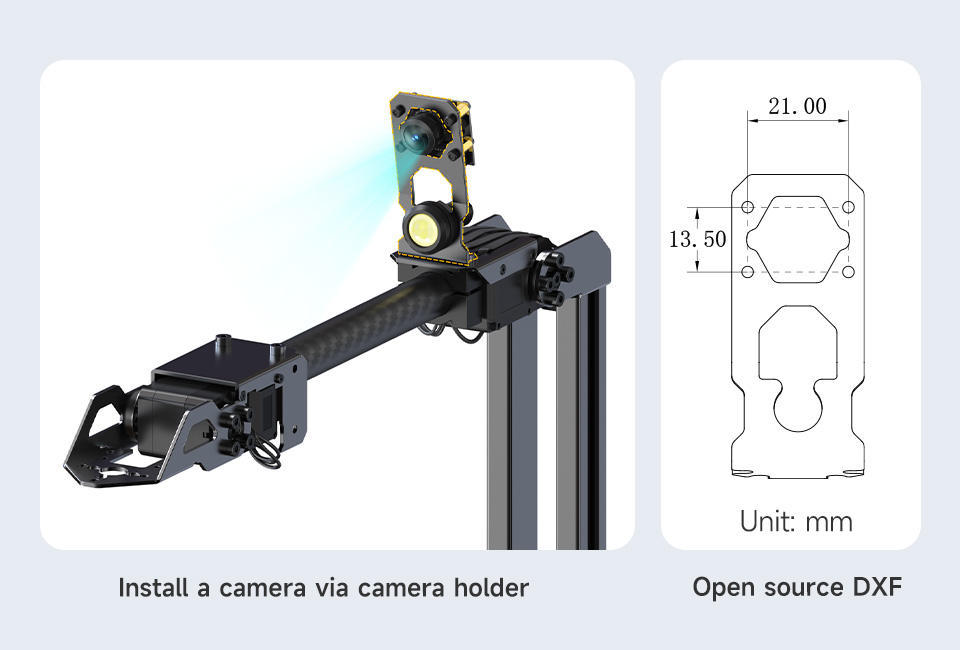
Stöder installation av en kamera
för att utöka visuella applikationer
Levereras med ett kamerafäste och öppen källkod för relaterade ritningar.
Du kan direkt installera en kamera med motsvarande storlek eller andra kameror
med en adapter
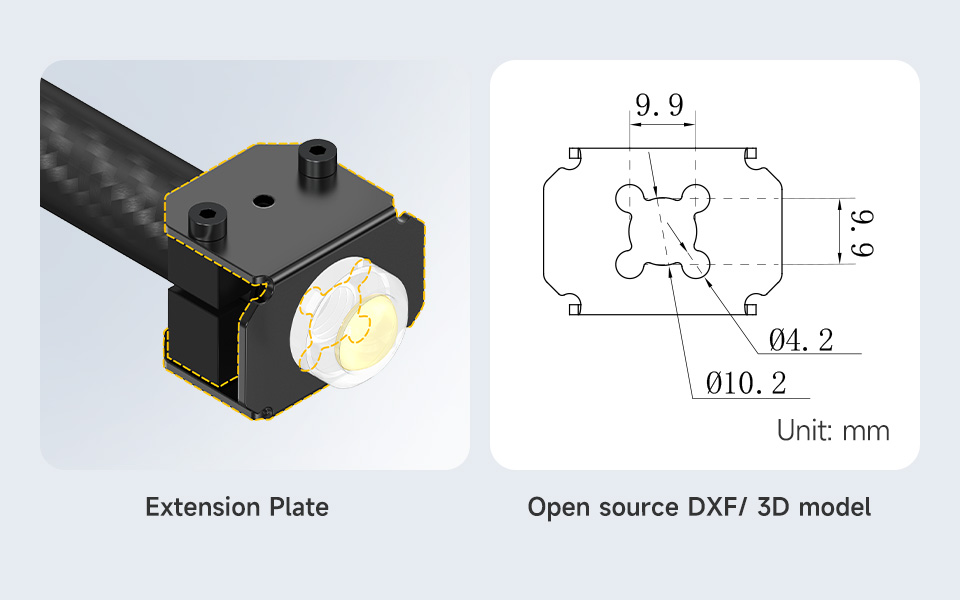
Stöder expansion av olika EoAT
för fler funktioner
Levereras med en expansionsplatta, enkel för användare att utöka och byta olika EoAT
för fler funktioner
Ombord ESP32 huvudkontrollkort
Använder ESP32 kraftfull huvudkontroll-MCU, stöder flera trådlösa kommunikationsprotokoll, med en stor mängd öppen källkod-resurser för att hjälpa sekundär utveckling av innovativa applikationer
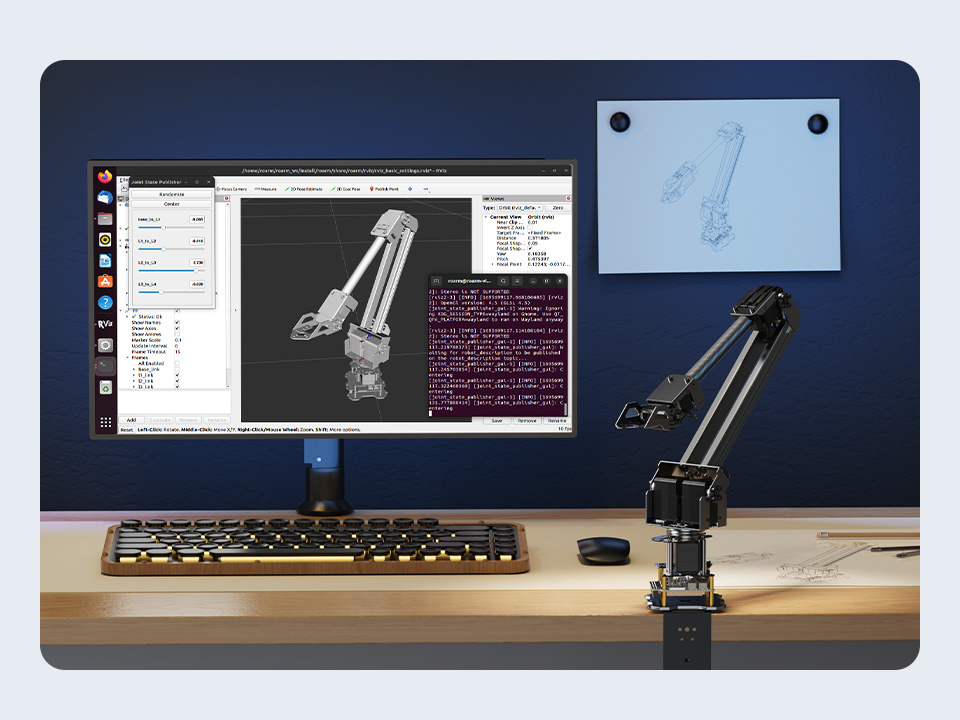
Kompatibel med ROS2, tillhandahåller
modelluppbyggnadsfil och stöder
samarbete mellan flera enheter
Tillhandahåller kommunikationsnoder för ROS2, URDF-modellbeskrivningsfil och nollbaserad tutorial för ROS2
Rika tutorialresurser för
sekundär utveckling
Vi tillhandahåller kompletta enhetstutorials och exempel, inklusive olika funktioner och vanliga tillämpningsscenarier, för att hjälpa användare att snabbt komma igång med sekundär utveckling
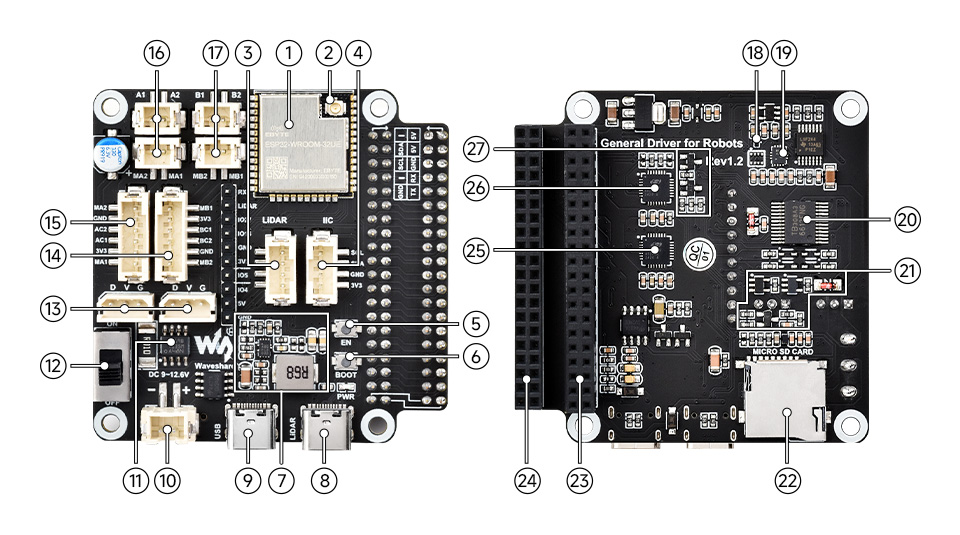
Allmän drivrutinskort för robotar
Ombord rika gränssnitt och resurser för innovativ utveckling och funktionsutvidgning
-
ESP32-WROOM-32 styrenhetsmodul
Kan utvecklas med Arduino IDE -
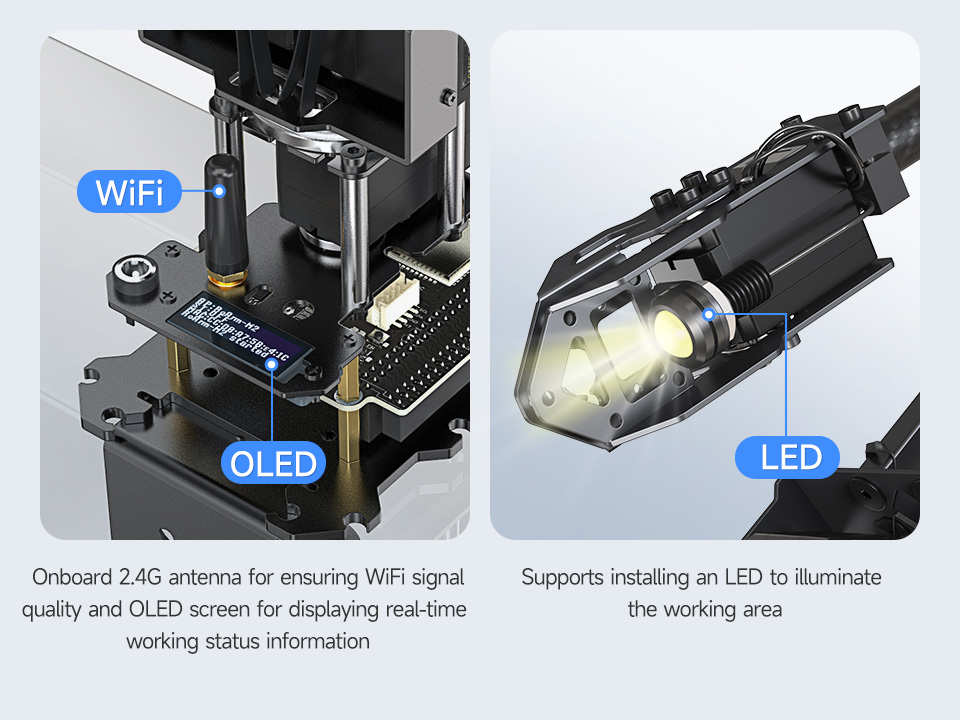
IPEX1 WIFI-kontakt
För att ansluta WIFI-antenn för att öka trådlös kommunikationsräckvidd -
LIDAR-gränssnitt
Integrerad radaradapterfunktion -
I2C periferiexpansionsgränssnitt
För anslutning till OLED-skärm eller andra I2C-sensorer -
Återställningsknapp
Tryck och släpp för att starta om ESP32 -
Nedladdningsknapp
ESP32 går in i nedladdningsläge efter påslagning -
DC-DC 5V spänningsregulator krets
Strömförsörjning för värddatorer som Raspberry Pi eller Jetson nano -
Type-C port (LADAR)
LIDAR dataöverföring -
Type-C port (USB)
ESP32 kommunikationsgränssnitt, för att ladda upp program till ESP32 -
XH2.54 strömport
Stöder DC 7~13V ingång, kan direkt driva seriell bussservon och motorer -
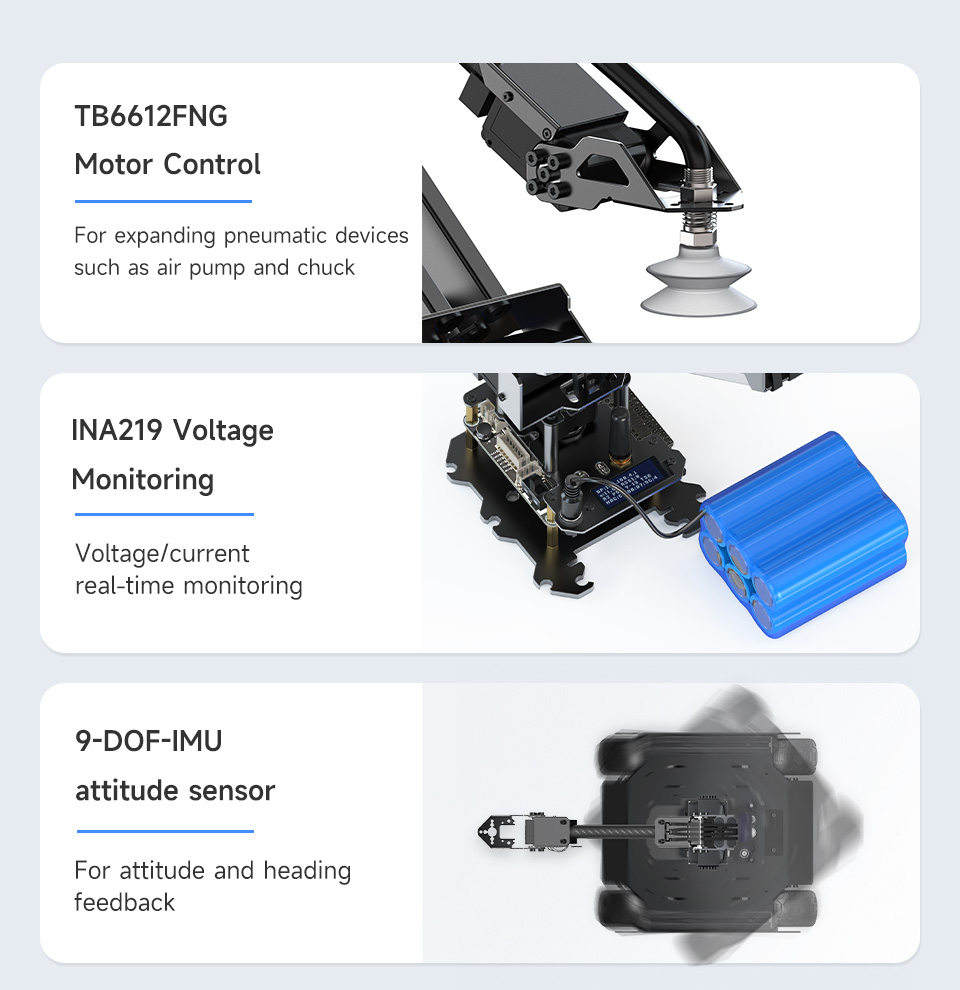
INA219
spännings-/strömövervakningschip -
Ström PÅ/AV
Extern strömförsörjning PÅ/AV -
ST3215 seriell bussservo-gränssnitt
För anslutning till ST3215 seriell bussservo -
Motorgränssnitt PH2.0 6P
Grupp B-gränssnitt för motor med encoder
-
Motorgränssnitt PH2.0 6P
Grupp A-gränssnitt för motor med encoder -
Motorgränssnitt PH2.0 2P
Grupp A-gränssnitt för motor utan encoder -
Motorgränssnitt PH2.0 2P
Grupp B-gränssnitt för motor utan encoder -
AK09918C
3-axlig elektronisk kompass -
QMI8658C
6-axlig rörelsesensor -
TB6612FNG
Motorstyrningschip -
Seriell buss servostyrningskrets
för att styra flera ST3215 seriella buss-servon och erhålla servo-feedback -
TF-kortplats
Kan användas för att lagra loggar eller WIFI-konfigurationer -
40PIN GPIO-kontakt
För anslutning till Raspberry Pi eller andra värdbrädor -
40PIN förlängningskontakt
Lätt att använda GPIO-stiften på Raspberry Pi eller andra värdbrädor -
CP-2102
UART till USB, för radardatatransmission -
CP-2102
UART till USB, för ESP32-kommunikation -
Automatisk nedladdningskrets
För att ladda upp program till ESP32 utan att trycka på EN- och BOOT-knapparna
Mångsidiga ombordresurser
Stödjer funktionsutvidgning
Integrerad TB6612FNG motorstyrnings-IC, INA219 batterispänningsövervakning och 9-axlig
IMU-sensor, stödjer funktionsutvidgning och innovation
Mus drag-och-släpp-interaktion
Tillhandahåller webbapplikationer och skrivbordsprogram (öppna källkodsprogram utvecklade i Python), stödjer inställning av åtgärdsinstruktioner när musknappen trycks ned och släpps
för att styra robotarmen flexibelt

Specifikationer
| DOF | 4 |
|---|---|
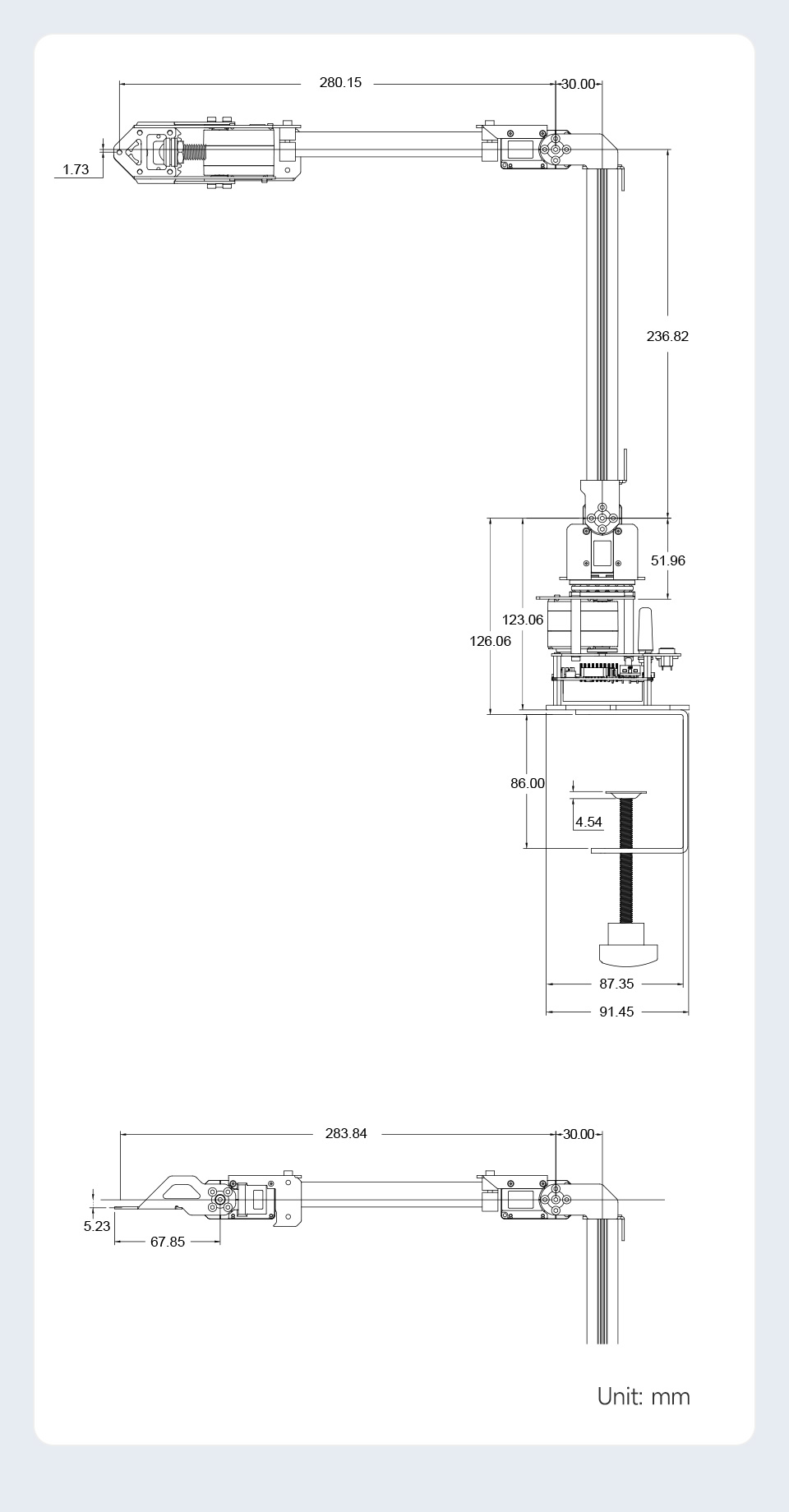
| Arbetsutrymme | Horisontell diameter: 1090mm (Max, 360° allriktad), Vertikal: 798mm (Max) |
| Driftspänning | 12V 5A strömförsörjning, stödjer 3S litiumbatterier (INGÅR EJ) |
| Lastkapacitet | 0.5kg@0.5m |
| Omsättningsprecision | ≈±4mm (under samma belastning) |
| Servorotationshastighet | 40rpm (utan belastning, ingen momentgräns) |
| Arbetsområde | BASE-360°, SHOULDER-180°, ELBOW-180°, HAND-135°/270° |
| Drivtyp | TTL seriell bussservo, direktdriven led |
| Servonummer | 5 |
| Ledvinkelsensor | 12-bitars 360° magnetisk encoder |
| Servomoment | 30KG.CM @12V |
| Ledåterkopplingsinformation | servo status, ledvinkel, rotationshastighet, ledlast, servospänning, servoström, servotemperatur och servots arbetsläge |
| Huvudkontroll | ESP32-WROOM-32 |
| Huvudkontrollmodulens funktioner | WiFi, BT, Dual Core, 240MHz |
| Trådlöst kontrolläge | 2.4G-WiFi, ESP-NOW |
| Trådbundet kontrolläge | USB, UART |
| Manuellt driftläge | WEB-kontrollgränssnitt |
| Värddriftläge | UART/USB/ESP-NOW*/HTTP-kommunikation via JSON-dataformatkommandon (* det stöder inte att erhålla återkopplingsinformation vid användning av ESP-NOW-kommunikation) |
| Värdstöd | USB-anslutna enheter inklusive Raspberry Pi, Jetson Orin Nano och PC. |
| EoAT-funktion | Klämfunktion som standard, kan ändras till en extra frihetsgrad |
| LED-effekt | ≤1,5W |
| OLED-skärmstorlek | 0.91inch |
| Andra funktioner | 2-kanals 12V strömförsörjningsbrytare, 9-DOF IMU |
| Robothandskens vikt | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873,3 ±15g (inkluderar inte bordskantsfästet) |
| Vikt för bordskantsfäste | 290g ±10g |
| Stöd för bordskants tjocklek för klämman | <72mm |
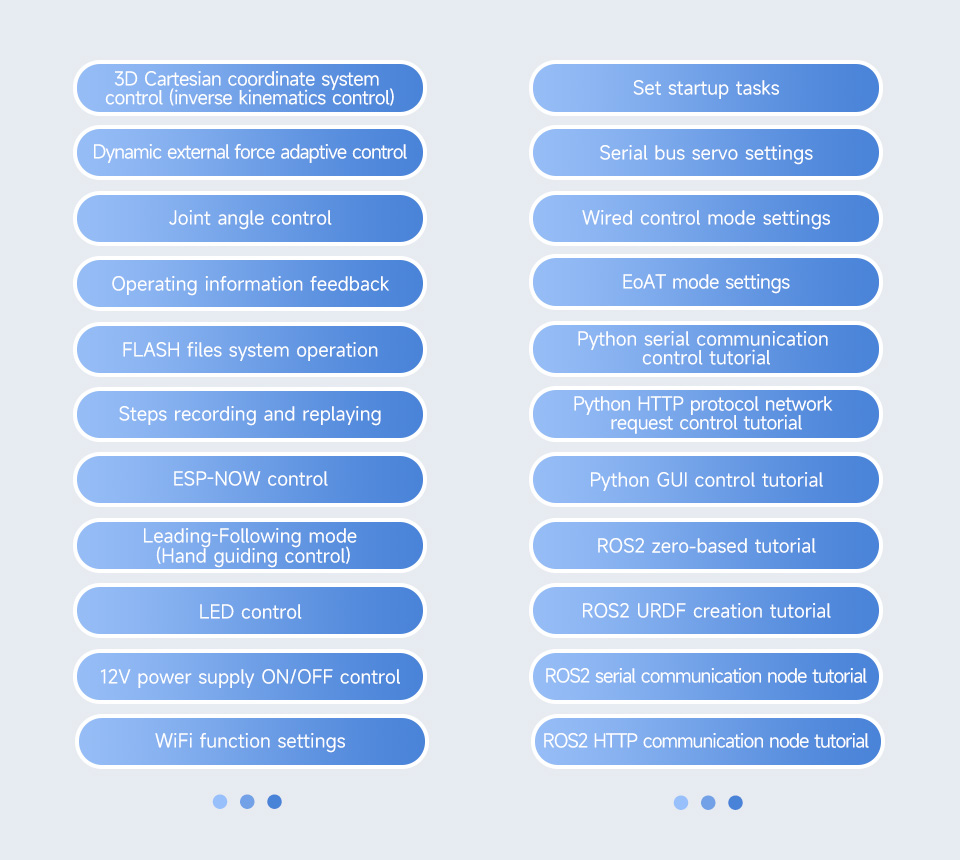
| Demo | 3D kartesiskt koordinatsystemkontroll (invers kinematikstyrning); Dynamisk adaptiv kontroll av yttre krafter; Ledvinkelkontroll; Återkoppling av driftinformation; FLASH-filsystemoperation; Steg-inspelning och uppspelning; ESP-NOW-kontroll; Ledar-Följare-läge (handstyrning); LED-kontroll; 12V strömförsörjning PÅ/AV-kontroll; WiFi-funktionsinställningar; Ställ in startuppgifter; Seriell buss-servoinställningar; Återkopplingslägesinställning; EoAT-lägesinställning, etc. (Obs: Vänligen se WIKI för mer detaljer) |
Produktvisning

Mått
1. Allmän fraktinformation
- Vi erbjuder premiumfraktmetoder med ett spårningsnummer för varje beställning.
-
Leveransadressen bör anges på engelska utan några specialtecken för att hjälpa kurirföretaget att känna igen din adress i systemet. Vi skickar enligt den leveransadress du angav. Vänligen meddela oss om någon adressändring innan din beställning markeras som "Skickad" för att undvika förlust av paket.
-
Vänligen kontakta vår kundtjänst omedelbart om du behöver avboka eller ändra en beställning. När din beställning har nått statusen "Skickad" kan den inte längre avbokas eller ändras på något sätt. För att undvika komplikationer, vänligen kontrollera din kundvagn igen innan du går till kassan.
-
Vi kan skicka alla lagerförda beställningar inom 1 arbetsdag efter att din beställning har bekräftats.
-
Alla artiklar inspekteras före leverans och packas noggrant för hand.
-
Med standardkurirpraxis måste du kontrollera innehållet i paketet innan du skriver under för dina varor. Annars ansvarar vi inte för eventuella skador som kan ha uppstått under transporten.
2. Fraktalternativ för Tyskland, EU*-länder och USA
(För produkter i Münchenlager, Long Beach-lager)
2.1 Order med ett värde som inte överstiger €5:
Fraktalternativ:
| Fraktalternativ | Tyskland | EU* |
|---|---|---|
|
Deutsche Post |
€6 Leverans inom 3-4 arbetsdagar |
€15 Leverans inom 5-9 arbetsdagar |
| Fraktalternativ | Kontinentala USA | Icke-kontinentala USA |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Leverans inom 3-7 arbetsdagar |
€8.95 Leverans inom 5-9 arbetsdagar |
|
UPS Express |
€13.95 Leverans inom 2-4 arbetsdagar |
€17.95 Leverans inom 3-7 arbetsdagar |
2.2 Fraktalternativ för en ordervärde mellan €5 och €30 inom Tyskland, €5 och €50 inom EU, eller €5 och €45 i USA:*
Fraktalternativ:
| Fraktalternativ | Tyskland | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Leverans inom 3-4 arbetsdagar |
€6 Leverans inom 5-9 arbetsdagar |
|
DHL Paket |
€6 Leverans inom 2-3 arbetsdagar |
€15 Leverans inom 3-7 arbetsdagar |
|
DHL Express |
€14 Leverans inom 1-2 arbetsdagar |
€65 Leverans inom 2-3 arbetsdagar |
| Fraktalternativ | Kontinentala USA | Icke-kontinentala USA |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Leverans inom 3-7 arbetsdagar |
€6.95 Leverans inom 5-9 arbetsdagar |
|
UPS Express |
€11.95 Leverans inom 2-4 arbetsdagar |
€13.95 Leverans inom 3-7 arbetsdagar |
2.3 Gratis fraktalternativ för en ordervärde över €30 inom Tyskland, €50 inom EU* eller €45 i USA:
| Gratis fraktalternativ | Tyskland | EU* |
|---|---|---|
|
Deutsche Post |
Gratis över €30 | Gratis över €50 |
|
DHL Paket |
+ 2 € för över 30 € / Gratis över 60 € | + 8 € för över 50 € / Gratis över 80 € |
|
DHL Express |
+ 10 € för över 30 € | + 60 € för över 50 € |
| Gratis fraktalternativ | Kontinentala USA | Icke-kontinentala USA |
|---|---|---|
|
USPS Ground Advantage |
Gratis över 45 € | Gratis över 60 € |
|
UPS Express |
+ 8,95 € för över 45 € | + 11,95 € för över 45 € |
-
Vissa EU-länder ingår inte i vår EU-zondefinition: Storbritannien (exklusive Irland), Schweiz, Liechtenstein, Vatikanstaten, Albanien, Vitryssland, Norge, Ukraina och Island. För ovanstående länder gäller Regeln för internationell frakt.
- Regionerna i Icke-kontinentala USA inkluderar: Alaska, Amerikanska Samoa, Guam, Hawaii, den Marshallöarna, den Norra Marianerna, Palau, Puerto Rico, den USA:s Jungfruöar, den USA:s väpnade styrkor i Amerika, den USA:s väpnade styrkor i Europa, den USA:s väpnade styrkor i Stilla havet, och USA:s avlägsna öar. Frakten och leveransen till dessa områden är föremål för Fraktregler för icke-kontinentala USA.
2.4 Fraktalternativ för internationella länder:
(via Deutsche Post eller YunExpress)
| Beställningsbelopp | Internationell |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| 50 € och uppåt | €4 |
Viktig information:
- Vänligen kontrollera lagrets plats på produktsidan innan du lägger din beställning för att bekräfta leveranstider.
- FFör produkter i Shenzhenlagret skickar vi vanligtvis först produkterna från Shenzhenlagret till vårt lager i München eller Long Beach, vilket tar cirka 1,5 vecka. När vi mottagit leveransen i München/Long Beach skickar vi varorna till dig. Vi ordnar endast YunExpress-frakt från Shenzhen för beställningar med produkter i Shenzhenlagret värda mer än 50 €.
- Om om du lägger en beställning med produkter från både München- och Shenzhen-lager, kommer vi först att skicka produkterna från Münchenlagret och sedan skicka de återstående produkterna till dig när vi mottagit dem från Shenzhen.
3. Internationellt lager
3.1 Tyskt lager
3.2 USA-lager
3.3 Kinesiskt lager
4. Tullar och skatter
4.1 Hur hanteras tullar av OpenELAB vid import eller export?
4.2 Hur debiteras moms när kunden lägger en beställning från OpenELAB?
4.3 Vilken typ av avgift tas ut utöver moms?
Giltighetsdatum: 7 augusti 2025
På OpenELAB är vi engagerade i att tillhandahålla korrekta produktbeskrivningar och leverera produkter av hög kvalitet. Om du upplever några problem med ditt köp, vänligen meddela oss inom 30 dagar från leveransdatum.
1. Ansvarsfriskrivning för garanti
Om det inte uttryckligen anges i ett specifikt avtal eller inköpsorder lämnar OpenELAB inga garantier—varken uttryckliga eller underförstådda—gällande lämplighet, användbarhet eller säljbarhet för någon produkt för ett särskilt ändamål eller speciell användning.
2. Garantipolicy
Garantiperiod
Den standardiserade garantiperioden för produkter som säljs av OpenELAB är 12 månader från leveransdatum.
Under denna garanti kommer OpenELAB att göra rimliga ansträngningar för att reparera eller byta ut produkter utan kostnad om defekter beror på problem med råmaterial, design eller tillverkning.
Om felet omfattas av denna policy men ligger utanför det täckta området kan rimliga kostnader tillkomma för reparation eller utbyte.
Efter garantiperioden kan support fortfarande vara tillgänglig mot en rimlig avgift.
Garantiexklusioner
Garantin gäller inte i följande fall:
- Produkten är utanför den 12-månaders garantiperioden.
- Skador orsakade av felaktig användning, bristande underhåll eller förvaring, eller underlåtenhet att följa användarguiden eller manualen.
- Problem orsakade av Force Majeure-händelser (t.ex. naturkatastrofer, krig, lagändringar, etc.).
- Obehöriga reparationsförsök av kunden.
- Produkten är inte defekt men har öppnats och kan inte returneras enligt policy.
3. Returer & Återbetalningar
Om du inte är nöjd med ditt köp kan du vara berättigad till retur eller byte:
- Retur för återbetalning: Inom 15 dagar från mottagandet (oöppnad).
- Retur för ersättning: Inom 30 dagar från mottagandet (skadad eller defekt).
- Bytessfönster: Upp till 30 dagar från mottagandet.
Vänligen mejla oss på info@openelab.io för en returauktorisation innan du skickar tillbaka något.
Returvillkor
- Varorna måste vara i original, rena och i nyskick med förpackningen intakt.
- Returer av skadade, använda, repade, modifierade eller programmerade varor accepteras inte.
- Bifoga kvittot, en kort anteckning med ditt namn, ordernummer och anledning till returen.
Frakt & Avgifter
- Kunder ansvarar för returfrakt till våra lager i Europa, USA eller Kina.
- Om en retur begärs på grund av kundorsaker (t.ex. ändrat beslut, felaktig beställning, etc.) kommer både ursprungliga fraktkostnaden och returfraktkostnaden att dras från återbetalningsbeloppet.
- För returer på grund av kundorsaker kommer vi att skapa och tillhandahålla en returfraktsedel.
Betalningsplattformavgifter
För alla återbetalningar som begärs på grund av kundorsaker kommer en standardavgift att dras från återbetalningsbeloppet, vilken debiteras av betalningsplattformarna. De specifika avgifterna är följande:
Shopify Payments: 1,8% + €0,3
PayPal: 4,4%
