



















































































































Waveshare wysokoprężny serwomechanizm szeregowej magistrali RoArm-M2 zestaw do robotycznego ramienia biurkowego
Pre-order
Darmowa wysyłka od 30€ w Niemczech, 50€ w UE!
- Zamówienia przedpremierowe zostaną wysłane w ciągu 5 dni roboczych.
- Czas dostawy do krajów UE i USA: 10 dni roboczych.
- Czas dostawy do innych krajów: 15 dni roboczych.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Waveshare wysokoprężny serwomechanizm szeregowej magistrali RoArm-M2 zestaw do robotycznego ramienia biurkowego
RoArm-M2
4-DOF wysokomomentowe ramię robotyczne z serwomechanizmami szeregowej magistrali
Obsługuje elastyczną rozbudowę i rozwój wtórny

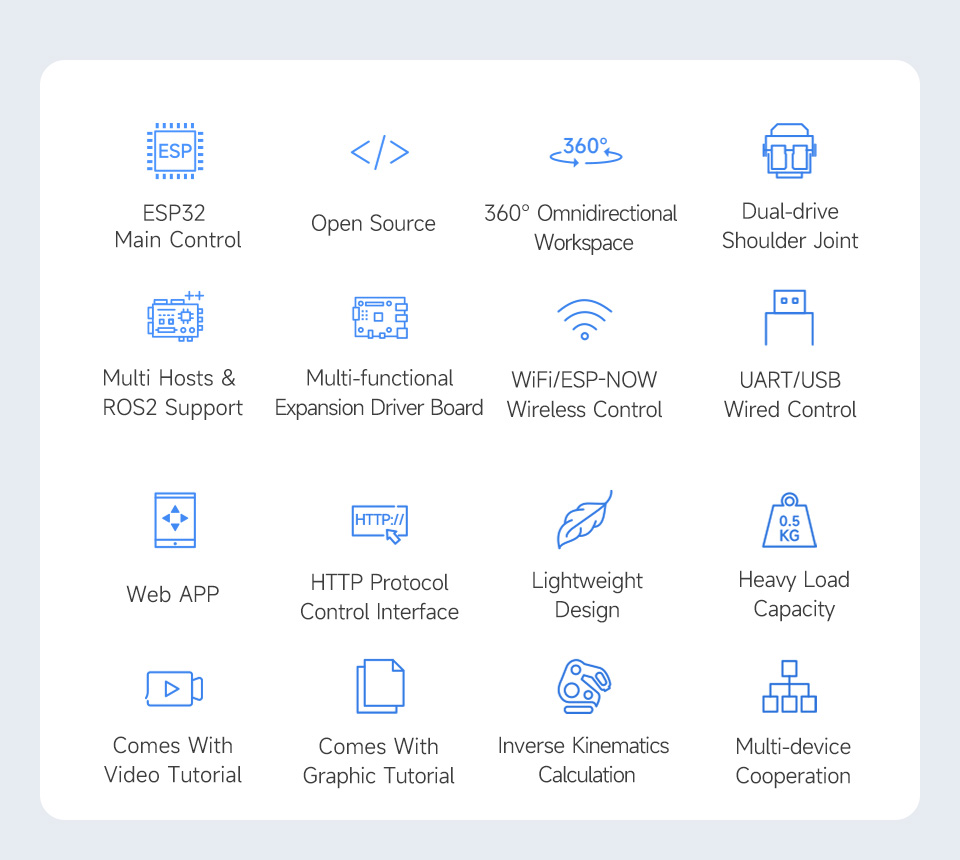
Najważniejsze cechy
Seria RoArm-M2 to 4DOF inteligentne ramię robotyczne zaprojektowane do innowacyjnych zastosowań. Przyjmuje lekką konstrukcję o łącznej wadze poniżej 900g i efektywnym udźwigu [email protected], może być elastycznie montowane na różnych platformach mobilnych. Przyjmuje 360° bazę wielokierunkową połączoną z trzema elastycznymi przegubami, tworząc obszar roboczy o średnicy 1 metra.
Projekt bezpośredniego napędu przegubów zwiększa precyzję ponownego pozycjonowania oraz poprawia niezawodność konstrukcji, a innowacyjna technologia podwójnego napędu podwaja moment obrotowy stawu barkowego. Wbudowany moduł głównego sterowania ESP32 MCU obsługuje wiele trybów sterowania bezprzewodowego, zapewnia interfejsy sterowania i bogate protokoły komunikacyjne do łatwego łączenia z różnymi urządzeniami.
Zapewnia przyjazną dla użytkownika i wieloplatformową aplikację WEB, która integruje prosty i wizualny tryb sterowania współrzędnymi, ułatwiając rozpoczęcie pracy. Zawiera bogate samouczki graficzne i wideo, które pomagają szybko się uczyć i korzystać. Kompatybilny z ROS2 i różnymi komputerami hosta, obsługuje różne tryby komunikacji bezprzewodowej i przewodowej. Zawiera płytkę rozszerzeń, wspiera dostosowywanie EoAT (End of Arm Tooling) do innowacyjnych wymagań aplikacji.
Seria RoArm-M2 osiąga doskonałą równowagę między lekkością, przyjaznością dla użytkownika, rozbudową i otwartą innowacją, jest wielofunkcyjnym ramieniem robotycznym integrującym inteligentne sterowanie, interakcję człowiek-maszyna oraz możliwość dostosowywania rozwoju. Idealne do zastosowań wymagających połączenia elastyczności, rozbudowy i przyjazności dla użytkownika.
Opcje wersji
Oferuje opcje dla RoArm-M2-S / RoArm-M2-Pro. Ulepszona wersja RoArm-M2-Pro jest wyposażona w metalowe serwomechanizmy ST3235 z magistralą, oferując bardziej wytrzymałą konstrukcję i stabilny luz, który nie zwiększa się z użytkowaniem, zwiększając trwałość produktu.

Porównanie parametrów
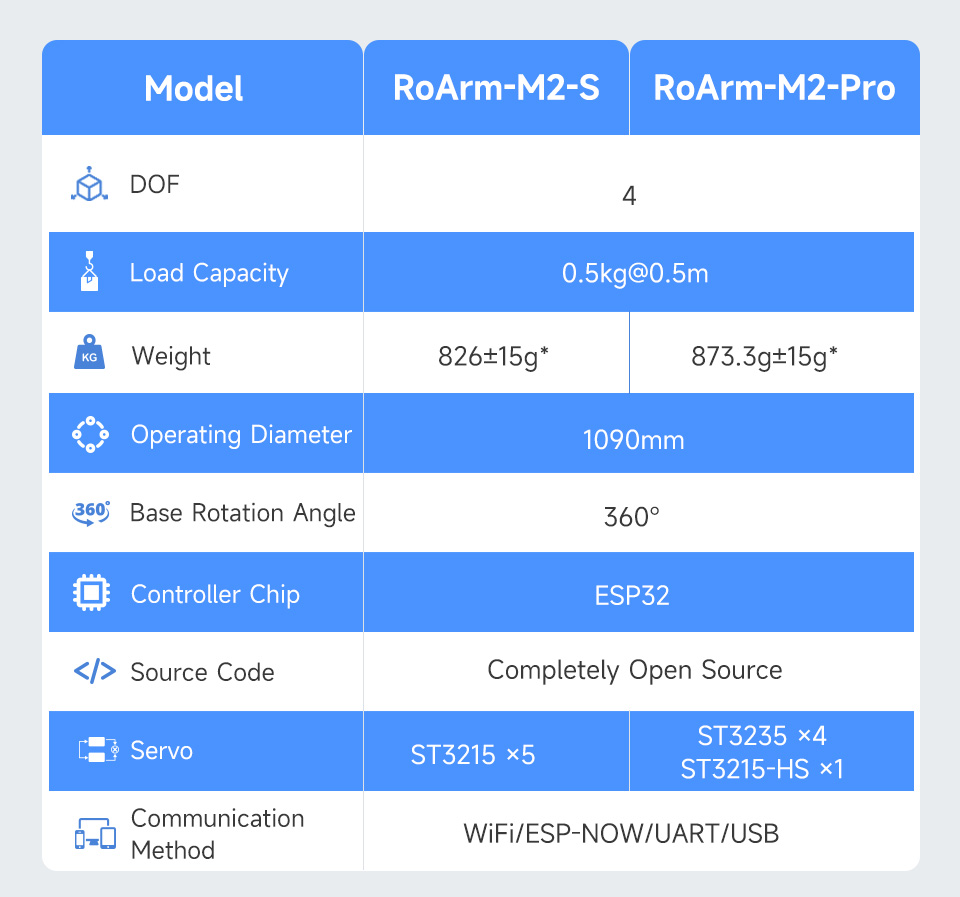
* Nie wliczając wagi zacisku mocującego krawędź stołu (290g).
Wiele metod montażu EoAT
EoAT obsługuje różne metody montażu, może być używany jako zacisk lub jako czwarty stopień swobody. Zapewnia otwarte modele DXF i 3D do samodzielnego wykonania i rozwoju wtórnego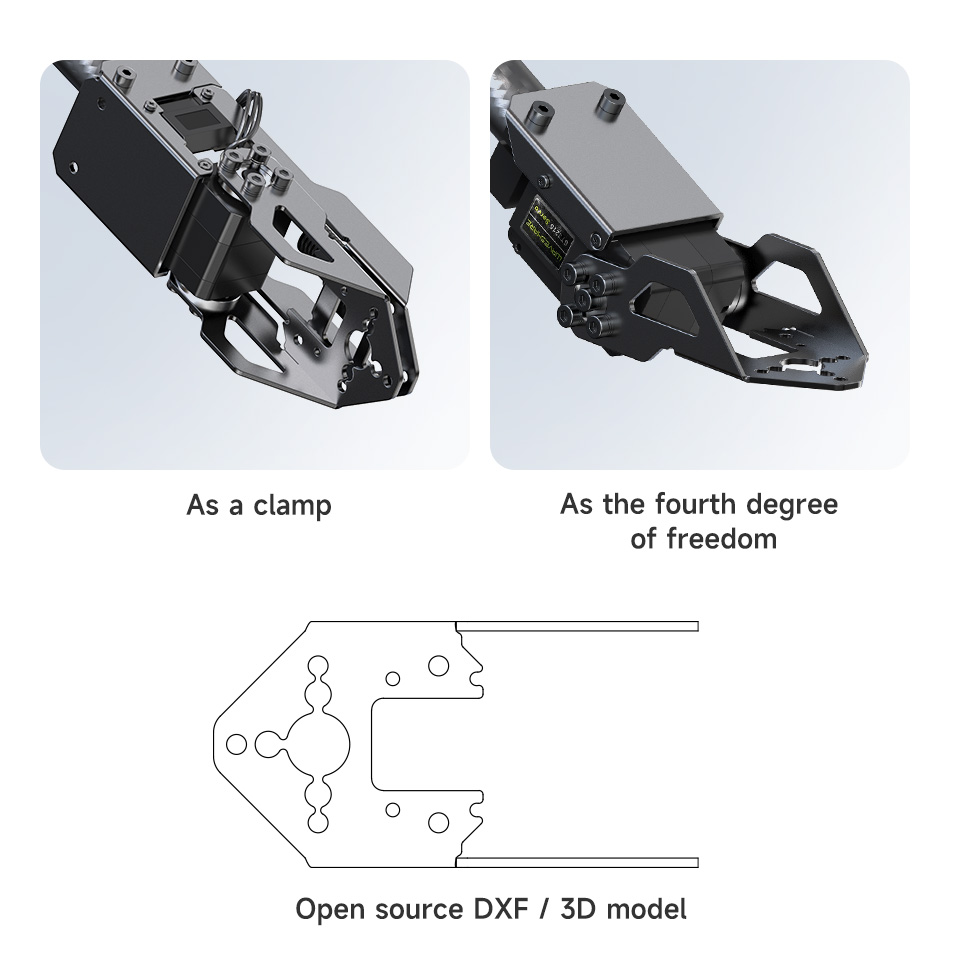
Elastyczne stawy × wielokierunkowa przestrzeń
Wykorzystuje podstawę obrotową 360° i elastyczne stawy, aby stworzyć wielokierunkową przestrzeń operacyjną o średnicy 1 metra, pozwalając EoAT na swobodne poruszanie się we wszystkich kierunkach
Łatwe sterowanie przez
Wieloplatformowa aplikacja internetowa
Nie wymaga instalacji aplikacji, dostęp po wpisaniu adresu. Umożliwia użytkownikom łączenie się i sterowanie RoArm-M2 za pomocą telefonów komórkowych, tabletów i komputerów przez kliknięcie przycisków w aplikacji internetowej. Obsługuje rozwój wtórny tej otwartoźródłowej aplikacji internetowej w celu dostosowania interfejsu użytkownika i dodania nowych funkcji.
Całkowicie otwarte źródło dla
rozwój wtórny
Całkowicie otwarte źródło dla kodów sterujących i dokumentów interfejsu komunikacyjnego serii Roarm-M2, obsługuje wiele języków i urządzeń do rozwoju wtórnego. Zapewnia modułowe dema i samouczki dla użytkowników zaczynających od zera, łatwe do rozpoczęcia.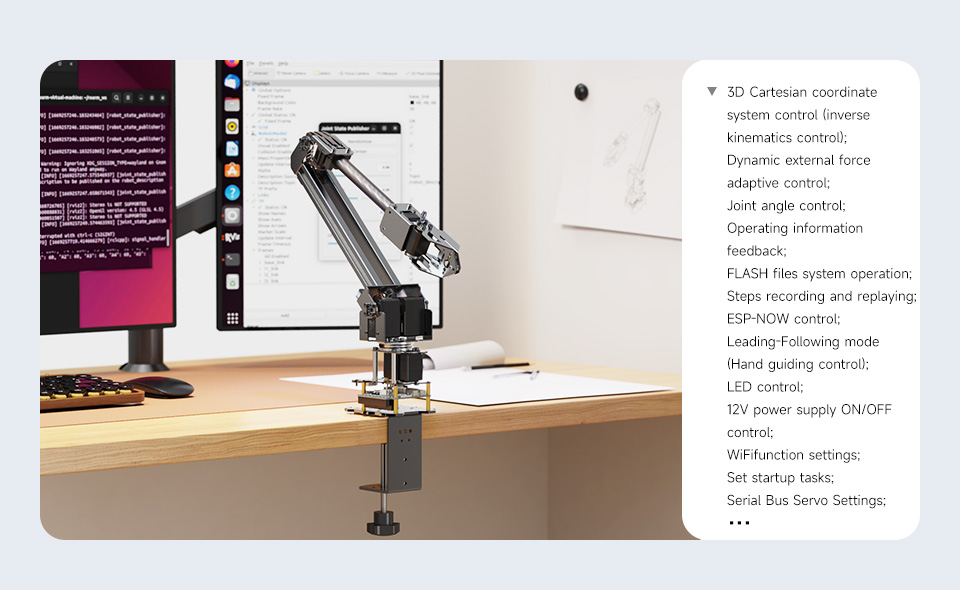
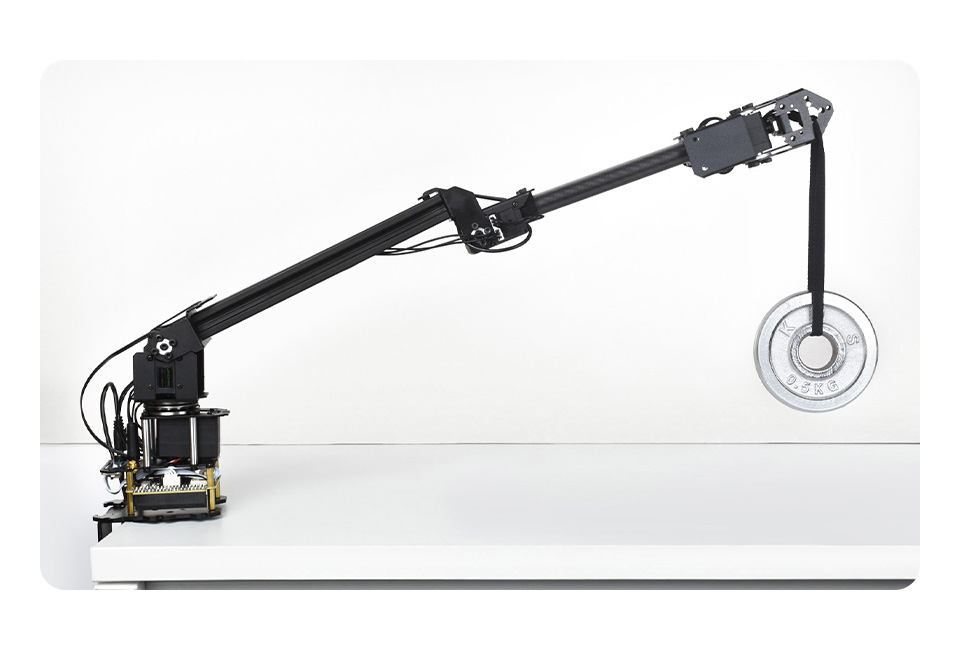
Lekka konstrukcja, doskonała nośność
lekka konstrukcja o łącznej masie poniżej 900g, wykorzystuje włókno węglowe
oraz stop aluminium 5052, aby zapewnić stabilność przy dużych obciążeniach,
odpowiedni dla różnych podwozi robotów mobilnych

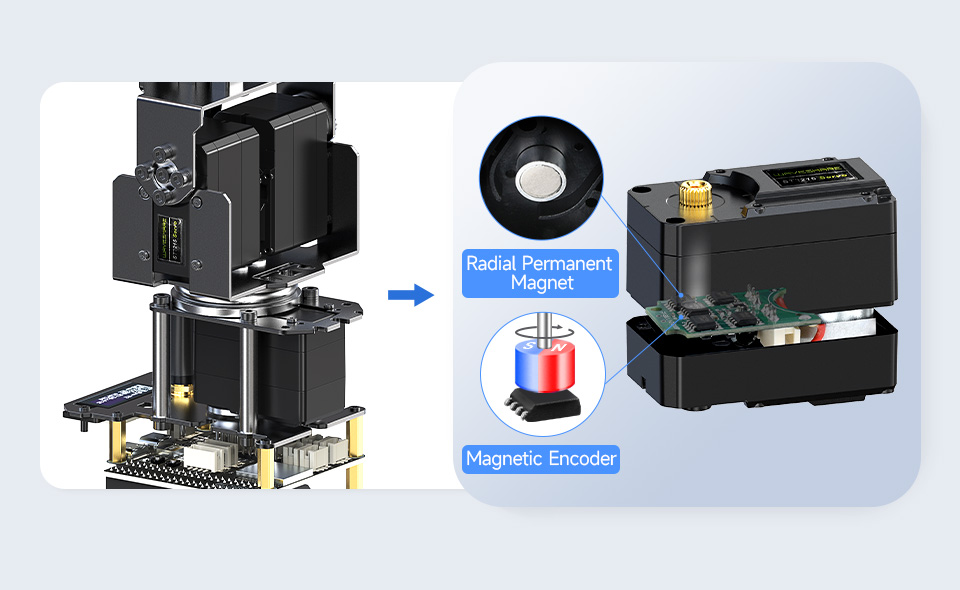
Projekt bezpośredniego napędu stawu
Dokładność sprzężenia zwrotnego do 0,088°
Sprzężenie zwrotne kąta stawu można uzyskać bezpośrednio za pomocą 12-bitowego wysokoprecyzyjnego enkodera magnetycznego bez żadnych przekładni, co jest dokładniejsze, a rzeczywista pozycja bieżącego punktu docelowego może być obliczona na podstawie sprzężenia zwrotnego kąta stawu.
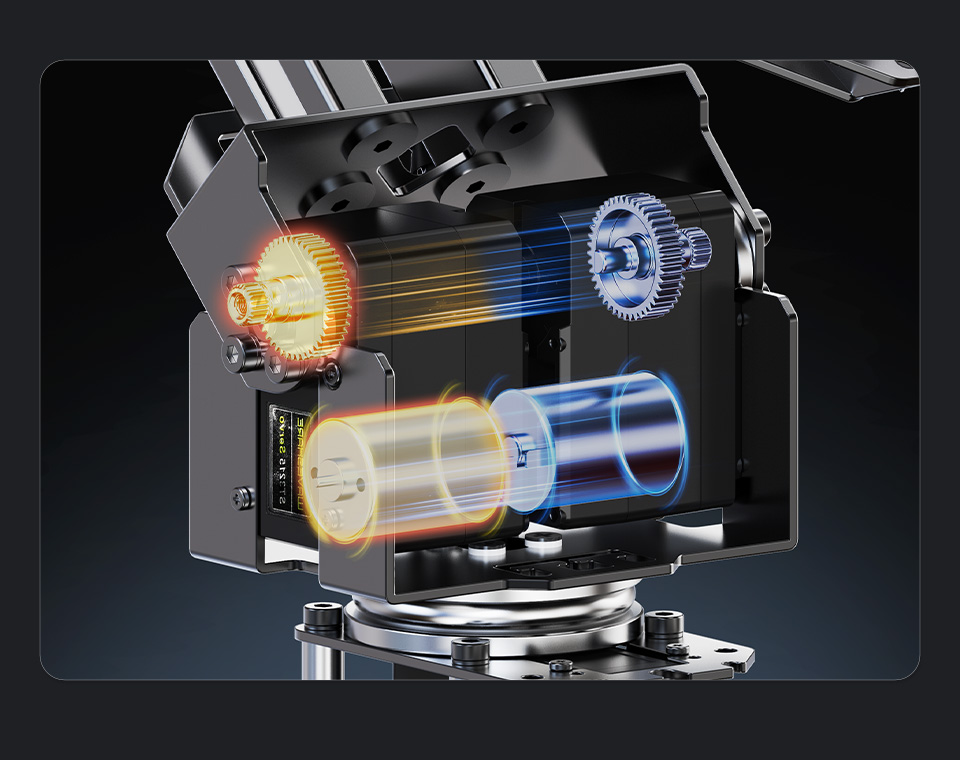
Innowacyjna technologia podwójnego napędu
podwaja moment obrotowy stawu barkowego
Opracowaliśmy algorytm sterowania dwoma napędami, który pozwala dwóm serwom w stawie barkowym skutecznie koordynować moment obrotowy, znacznie zwiększając
moc i całkowitą nośność serii RoArm-M2
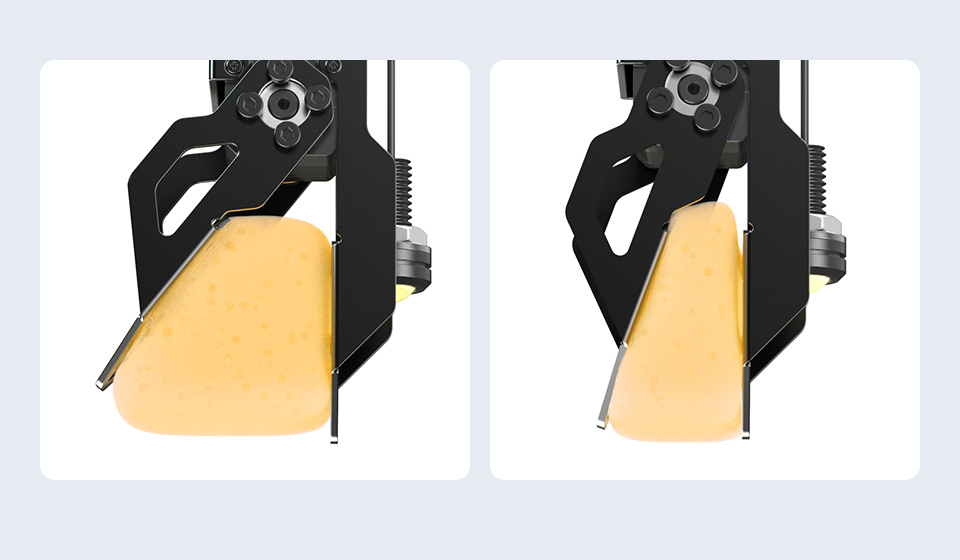
Bezpośredni napęd zacisku umożliwia precyzyjne
kontrola siły
Bezpośredni napęd zacisku pozwala na precyzyjną kontrolę siły zacisku w programie, co jest odpowiednie do chwytania delikatnych przedmiotów bez nadmiernego nacisku
Obsługuje montaż gumek
do kompensacji wpływu
grawitacji
Stawy BARKU i ŁOKCIA obsługują montaż gumek, które wspomagają ramię robota, wykorzystując elastyczne kurczenie się gumek do kompensacji wpływu grawitacji i zwiększenia efektywnego obciążenia ramienia robota.
Dynamiczna siła zewnętrzna
sterowanie adaptacyjne
Po włączeniu tej funkcji można ograniczyć maksymalny moment obrotowy dla każdego stawu. Gdy siła zewnętrzna działająca na staw przekroczy próg momentu obrotowego (konfigurowalny), ramię robota obróci się pod wpływem siły zewnętrznej i powróci do określonej pozycji, gdy siła zewnętrzna spadnie poniżej progu momentu.

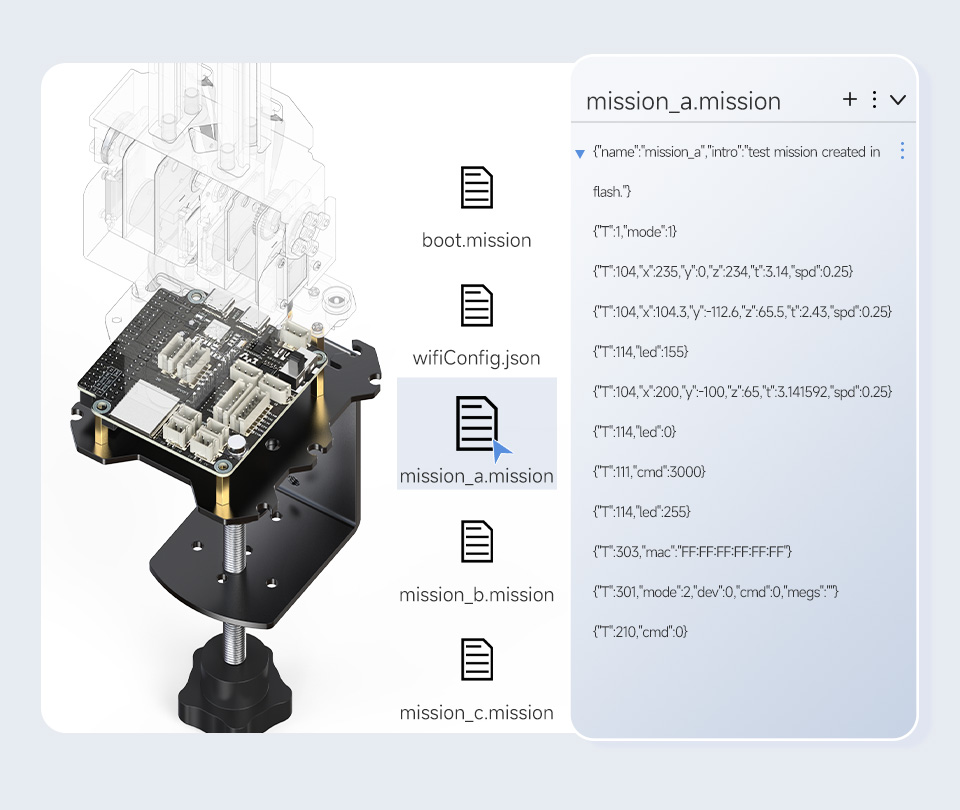
Automatyczne nagrywanie jednym kliknięciem
Łatwe tworzenie akcji
RoArm-M2 może zapisywać instrukcje JSON do sterowania robotem jako pliki zadań. Pliki zadań mogą być przechowywane w pamięci Flash ESP32, co zapobiega ich utracie w przypadku zaniku zasilania. Ramię robota może wykonywać złożone i powtarzalne operacje, wywołując te pliki zadań.
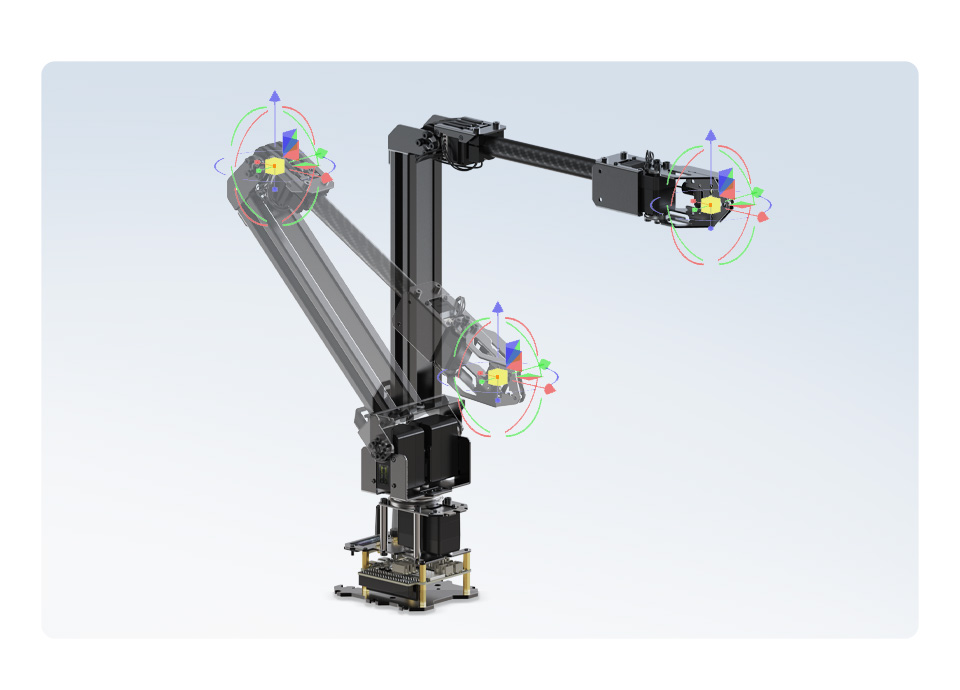
Dokładne osiągnięcie celu przez wprowadzenie współrzędnych
Oprogramowanie open source dla algorytmu sterowania odwrotną kinematyką w trójwymiarowym układzie współrzędnych kartezjańskich. Po wprowadzeniu docelowej pozycji, ramię robota może dokładnie osiągnąć punkt docelowy, wykorzystując funkcję odwrotnej kinematyki do obliczenia kąta obrotu każdego stawu.
Kontrola prędkości na zakrętach dla
Płynniejszy ruch
Używamy algorytmu sterowania prędkością krzywej, aby ramię robota poruszało się płynniej i naturalniej, bez oscylacji podczas startu i zatrzymania

Bezprzewodowe sterowanie ESP-NOW
Współpraca zdalna o niskim opóźnieniu
ESP-NOW to protokół bezprzewodowej komunikacji ad hoc o niskim opóźnieniu, nie wymagający infrastruktury sieciowej. Możesz użyć jednego ramienia robota do bezprzewodowego sterowania innymi ramionami, a metody sterowania mogą być ustawione jako sterowanie nadawcze, grupowe lub jeden na jeden.
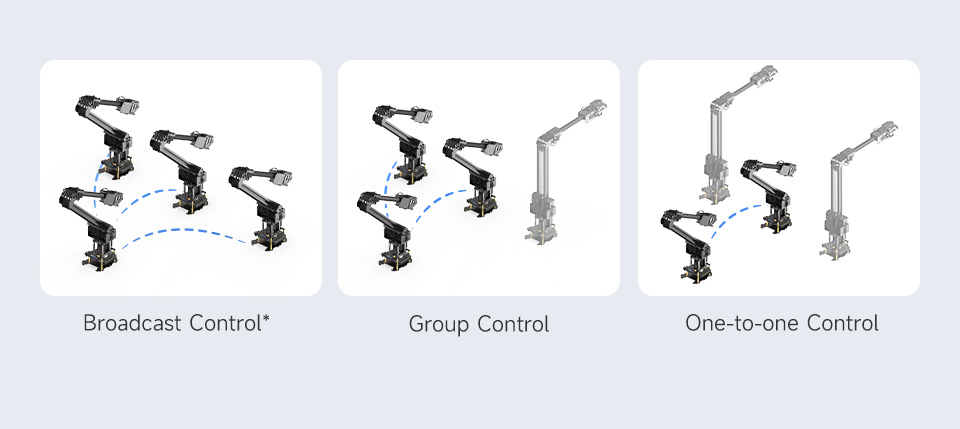
* Uwaga: sterowanie nadawcze nie ma ograniczenia liczby kontrolowanych urządzeń, natomiast sterowanie grupowe pozwala na maksymalnie 20 urządzeń. Szczegóły znajdziesz w WIKI.
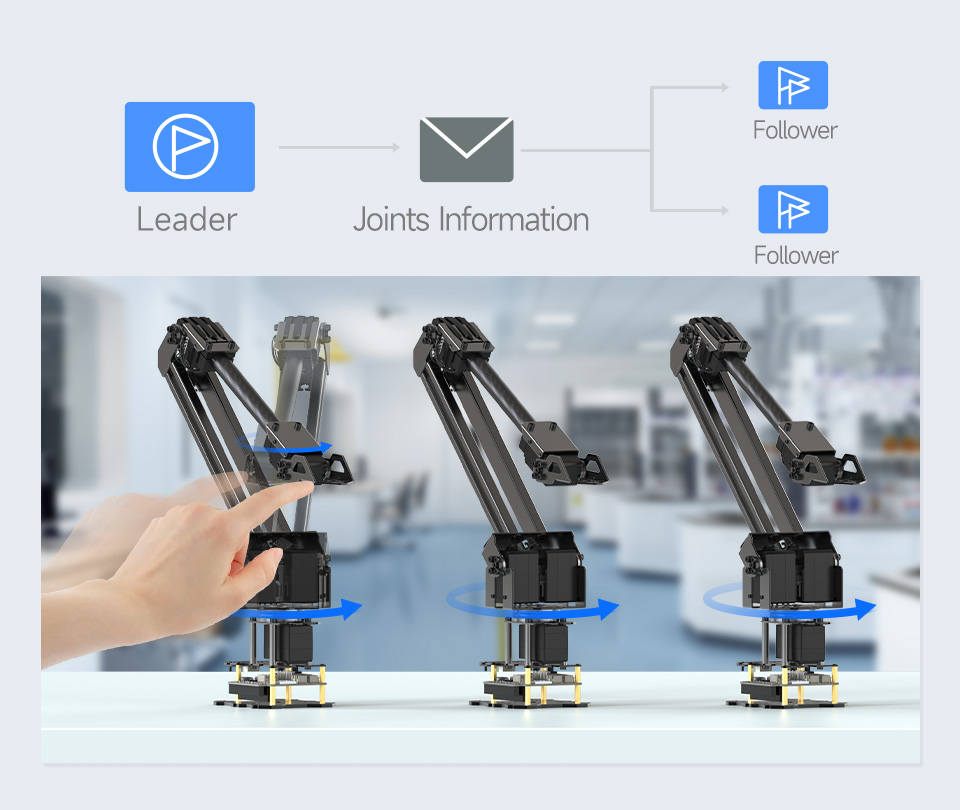
Obsługuje tryb sterowania Lider-Podążający oparty na ESP-NOW
W trybie sterowania Lider-Podążający, ramię robota Lider wysyła informacje o kątach stawów do innych ramion robota za pomocą komunikacji ESP-NOW. Pozostałe ramiona robota w trybie ESP-NOW Follower naśladują te same ruchy co Lider w czasie rzeczywistym.
Wiele interfejsów sterowania,
Obsługa wielu urządzeń i języków
Seria RoArm-M2 może być sterowana nie tylko przez aplikację WEB, ale także obsługuje użycie innych kontrolerów do wysyłania poleceń JSON za pomocą protokołu HTTP, komunikacji szeregowej lub USB w celu sterowania i uzyskiwania informacji zwrotnej.
Wiele metod instalacji do integracji z Twoją aplikacją
Zapewnia wiele schematów instalacji oraz powiązane zasoby do dalszego rozwoju, odpowiednie dla różnych scenariuszy użytkowania i elastycznie integrujące się z Twoimi projektami i aplikacjami

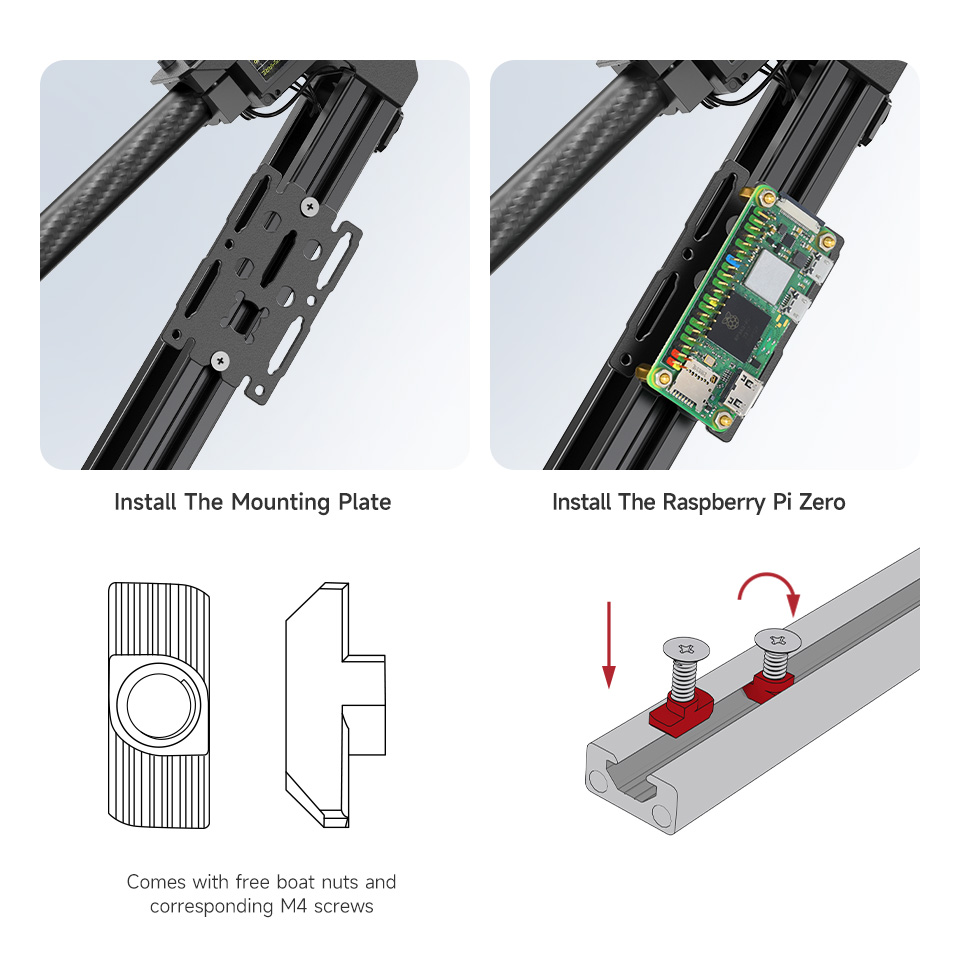
Łatwy montaż różnych peryferiów
Główna konstrukcja ramienia górnego wykorzystuje dwie aluminiowe szyny 1020 zgodne z europejskim standardem, umożliwiające montaż dodatkowych peryferiów za pomocą nakrętek typu boat, aby sprostać różnym potrzebom. W zestawie znajdują się nakrętki boat oraz odpowiadające im śruby M4 dla łatwej instalacji.
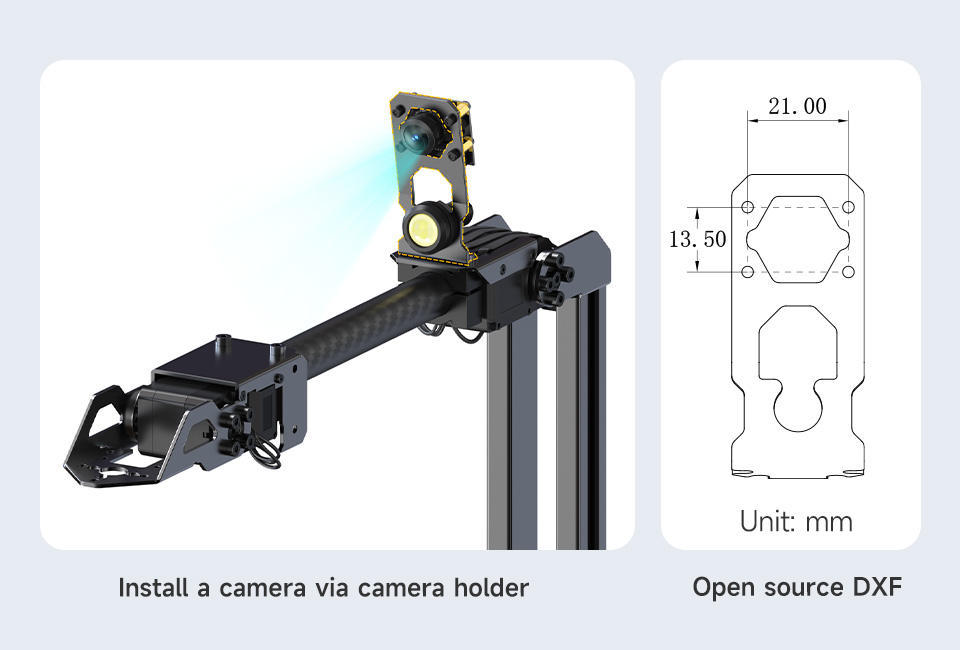
Obsługuje instalację kamery
aby rozszerzyć zastosowania wizualne
Dostarczany z uchwytem na kamerę oraz otwartym dostępem do powiązanych rysunków.
Możesz bezpośrednio zainstalować kamerę o odpowiednim rozmiarze lub inne kamery
z adapterem
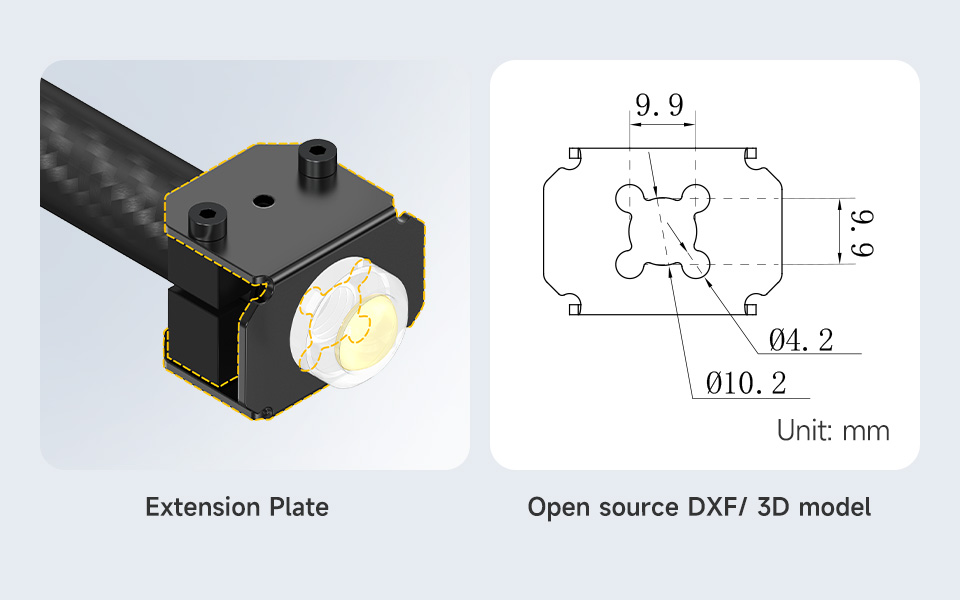
Obsługuje rozszerzanie różnych EoAT
dla większej liczby funkcji
Dostarczany z płytką rozszerzeń, ułatwiającą użytkownikom rozbudowę i wymianę różnych EoAT
dla większej liczby funkcji
Wbudowana płyta główna sterująca ESP32
Wykorzystuje potężny MCU głównego sterowania ESP32, obsługuje wiele protokołów komunikacji bezprzewodowej, z dużą ilością zasobów open source wspierających rozwój wtórny innowacyjnych aplikacji
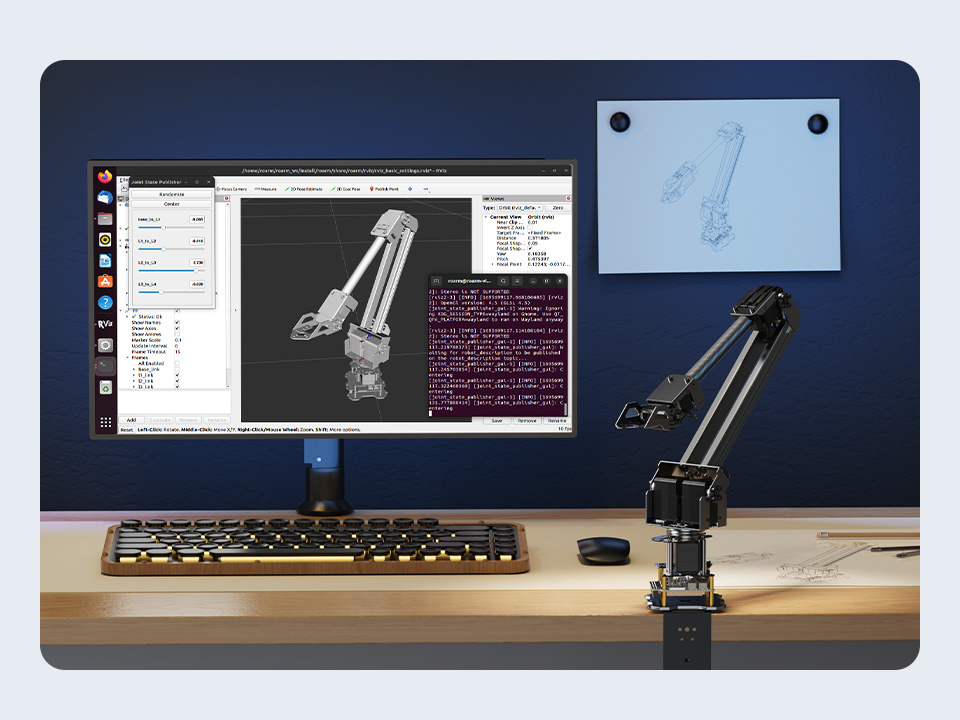
Kompatybilny z ROS2, zapewnia
plik ustanowienia modelu i obsługuje
współpraca wielu urządzeń
Zapewnia węzły komunikacyjne ROS2, plik opisu modelu URDF oraz samouczek ROS2 od podstaw
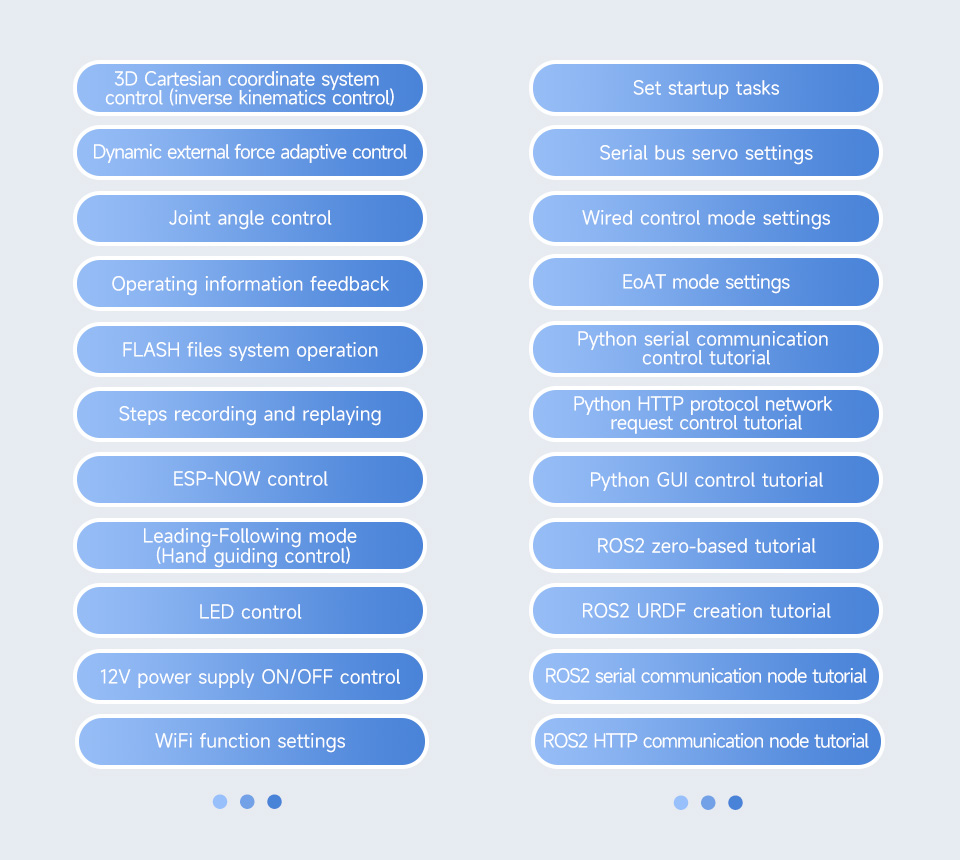
Bogate zasoby samouczków dla
rozwój wtórny
Zapewniamy kompletne samouczki i przykłady jednostkowe, w tym różne funkcje i typowe scenariusze zastosowań, aby pomóc użytkownikom szybko rozpocząć rozwój wtórny
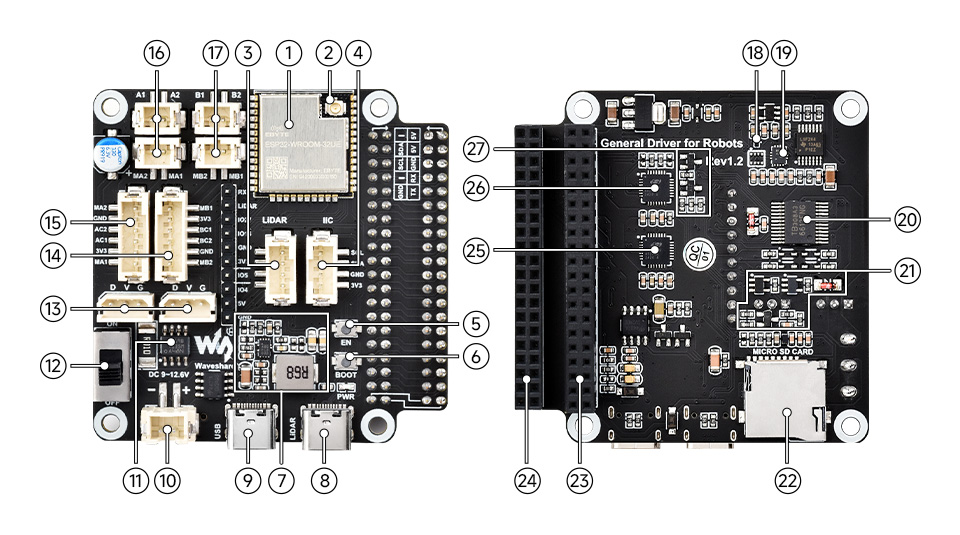
Ogólna płyta sterownika dla robotów
Wbudowane bogate interfejsy i zasoby do innowacyjnego rozwoju i rozszerzania funkcji
-
Moduł kontrolera ESP32-WROOM-32
Można rozwijać za pomocą Arduino IDE -
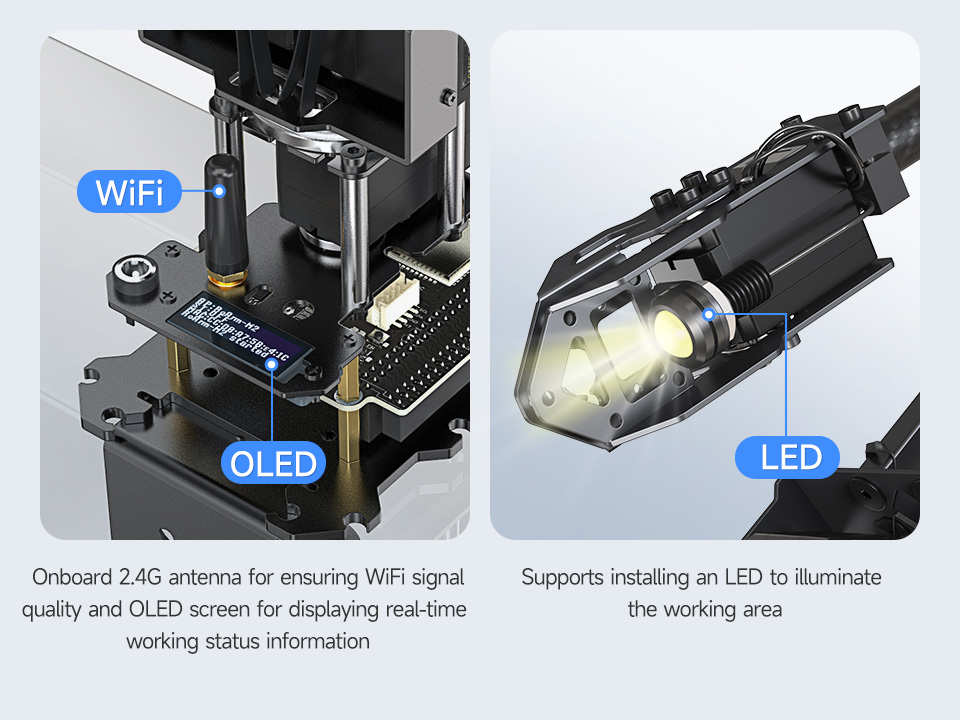
Złącze IPEX1 WIFI
Do podłączenia anteny WIFI w celu zwiększenia zasięgu komunikacji bezprzewodowej -
Interfejs LIDAR
Zintegrowana funkcja adaptera radaru -
Interfejs rozszerzenia peryferyjnego I2C
Do podłączenia z ekranem OLED lub innymi czujnikami I2C -
Przycisk resetowania
Naciśnij i zwolnij, aby zrestartować ESP32 -
Przycisk pobierania
ESP32 przejdzie w tryb pobierania po włączeniu zasilania -
Obwód stabilizatora napięcia DC-DC 5V
Zasilanie dla komputerów głównych takich jak Raspberry Pi lub Jetson nano -
Port Type-C (LADAR)
Transmisja danych LIDAR -
Port Type-C (USB)
Interfejs komunikacyjny ESP32, do wgrywania programów na ESP32 -
Port zasilania XH2.54
Obsługuje wejście DC 7~13V, może bezpośrednio zasilać serwomechanizmy i silniki magistrali szeregowej -
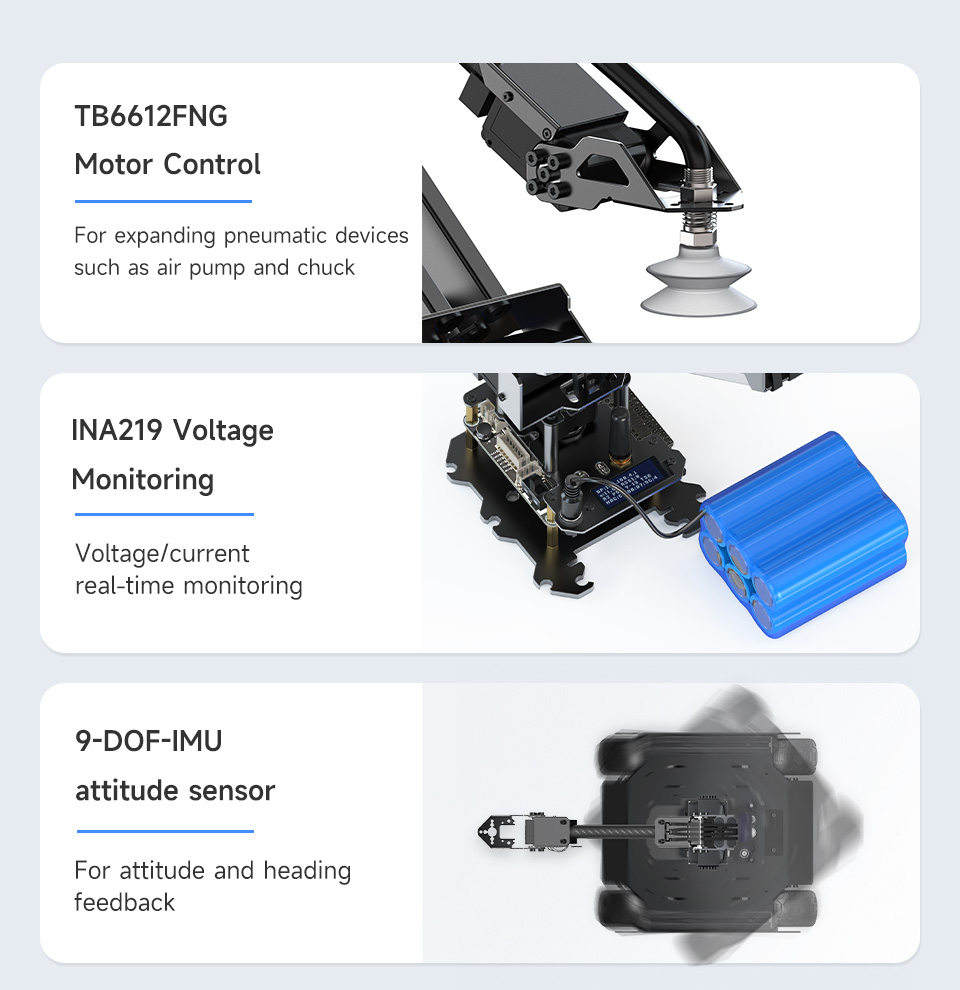
INA219
układ monitorujący napięcie/prąd -
Zasilanie WŁ./WYŁ.
Zewnętrzne zasilanie WŁ./WYŁ. -
Interfejs serwomechanizmu szeregowego magistrali ST3215
Do podłączenia z serwomechanizmem szeregowego magistrali ST3215 -
Interfejs silnika PH2.0 6P
Interfejs grupy B dla silnika z enkoderem
-
Interfejs silnika PH2.0 6P
Interfejs grupy A dla silnika z enkoderem -
Interfejs silnika PH2.0 2P
Interfejs grupy A dla silnika bez enkodera -
Interfejs silnika PH2.0 2P
Interfejs grupy B dla silnika bez enkodera -
AK09918C
3-osiowy kompas elektroniczny -
QMI8658C
6-osiowy czujnik ruchu -
TB6612FNG
Układ sterowania silnikiem -
Obwód sterowania serwomechanizmem magistrali szeregowej
do sterowania wieloma serwomechanizmami szeregowej magistrali ST3215 i uzyskiwania informacji zwrotnej z serw -
Gniazdo karty TF
Może być używany do przechowywania logów lub konfiguracji WIFI -
40-pinowy nagłówek GPIO
Do podłączenia z Raspberry Pi lub innymi płytami głównymi -
40-pinowy rozszerzony nagłówek
Łatwe użycie pinów GPIO Raspberry Pi lub innych płyt głównych -
CP-2102
UART do USB, do transmisji danych radaru -
CP-2102
UART do USB, do komunikacji z ESP32 -
Automatyczny obwód pobierania
Do przesyłania programów do ESP32 bez naciskania przycisków EN i BOOT
Zróżnicowane zasoby na pokładzie
Obsługuje rozszerzenia funkcji
Zintegrowany układ sterujący silnikiem TB6612FNG, monitorowanie napięcia baterii INA219 oraz 9-osiowy
Czujnik IMU, obsługuje rozszerzenia funkcji i innowacje
Interakcja przeciągnij i upuść myszy
Udostępnia aplikacje webowe i oprogramowanie desktopowe (programy open-source rozwijane w Pythonie), obsługuje ustawianie instrukcji działania przy naciśnięciu i zwolnieniu myszy
do elastycznego sterowania ramieniem robota

Specyfikacje
| DOF | 4 |
|---|---|
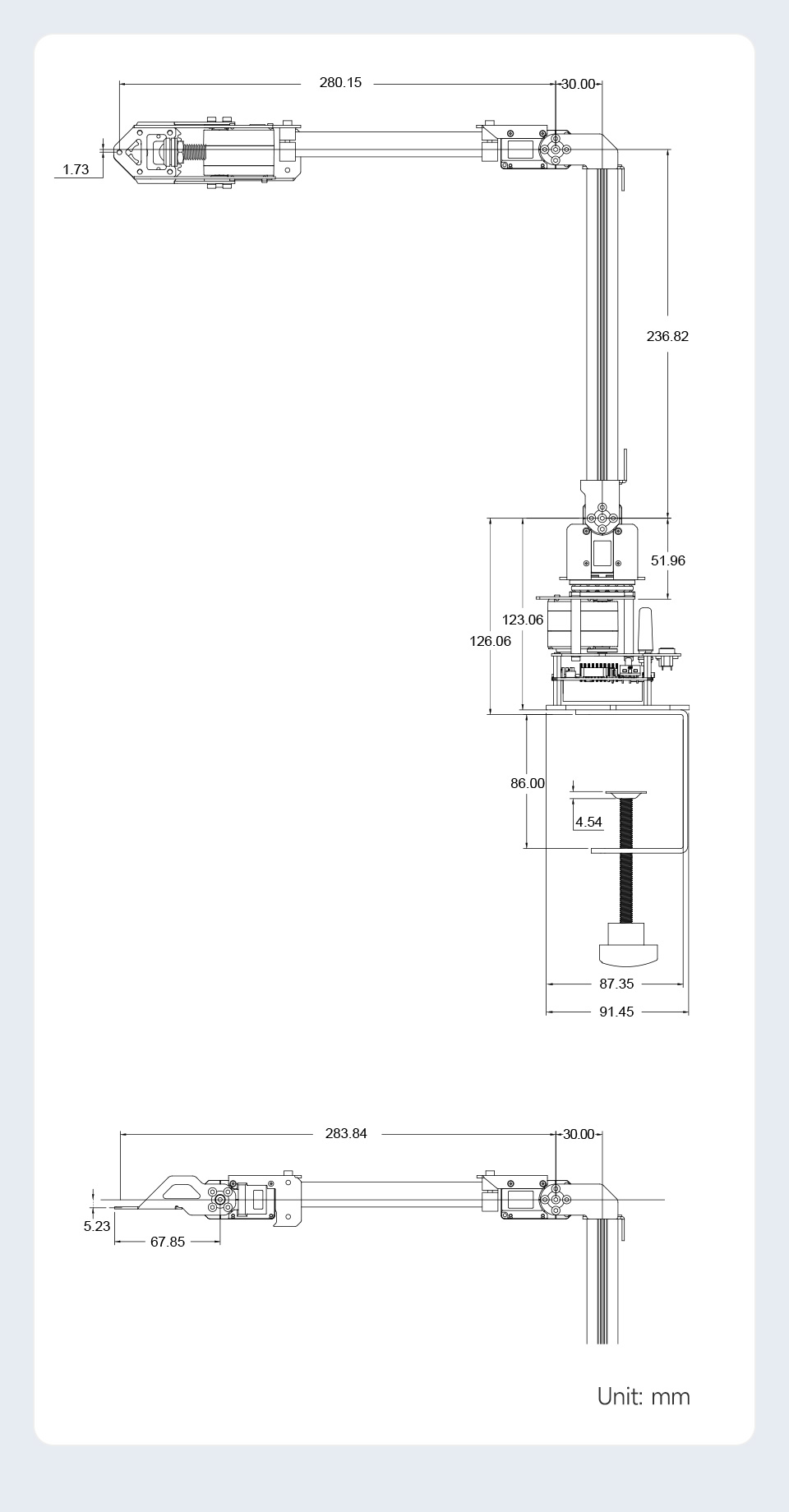
| Przestrzeń robocza | Średnica pozioma: 1090mm (maksymalna, 360° wszechkierunkowa), pionowa: 798mm (maksymalna) |
| Napięcie robocze | Zasilanie 12V 5A, obsługuje baterie litowe 3S (NIE w zestawie) |
| Udźwig | 0.5kg@0.5m |
| Dokładność repozycjonowania | ≈±4mm (przy tym samym obciążeniu) |
| Prędkość obrotu serwomechanizmu | 40obr./min (bez obciążenia, bez ograniczenia momentu obrotowego) |
| Zakres pracy | BASE-360°, SHOULDER-180°, ELBOW-180°, HAND-135°/270° |
| Typ napędu | Serwomechanizm szeregowy TTL, przegub bezpośredniego napędu |
| Liczba serwomechanizmów | 5 |
| Czujnik kąta przegubu | 12-bitowy magnetyczny enkoder 360° |
| Moment obrotowy serwomechanizmu | 30KG.CM @12V |
| Informacje zwrotne przegubu | status serwomechanizmu, kąt przegubu, prędkość obrotowa, obciążenie przegubu, napięcie serwomechanizmu, prąd serwomechanizmu, temperatura serwomechanizmu oraz tryb pracy serwomechanizmu |
| Główne sterowanie | ESP32-WROOM-32 |
| Funkcje głównego modułu sterującego | WiFi, BT, Dual Core, 240MHz |
| Tryb sterowania bezprzewodowego | 2.4G-WiFi, ESP-NOW |
| Tryb sterowania przewodowego | USB, UART |
| Tryb pracy ręcznej | Interfejs sterowania WEB |
| Tryb pracy hosta | Komunikacja UART/USB/ESP-NOW*/HTTP za pomocą poleceń w formacie danych JSON (* nie obsługuje uzyskiwania informacji zwrotnej przy użyciu komunikacji ESP-NOW) |
| Wsparcie hosta | Urządzenia podłączane przez USB, w tym Raspberry Pi, Jetson Orin Nano i PC. |
| Funkcja EoAT | funkcja zacisku domyślnie, może być zmieniona na dodatkowy stopień swobody |
| Moc LED | ≤1.5W |
| Rozmiar ekranu OLED | 0.91inch |
| Inne funkcje | Przełącznik zasilania 2-kanałowy 12V, 9-DOF IMU |
| Waga ramienia robota | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873.3 ±15g (nie wliczając zacisku mocującego krawędź stołu) |
| waga zacisku mocującego krawędź stołu | 290g ±10g |
| Obsługiwana grubość krawędzi stołu zacisku | <72mm |
| Demo | Sterowanie układem współrzędnych kartezjańskich 3D (sterowanie kinematyką odwrotną); Dynamiczne adaptacyjne sterowanie siłą zewnętrzną; Sterowanie kątem stawów; Informacje zwrotne o działaniu; Operacje na plikach FLASH; Nagrywanie i odtwarzanie kroków; Sterowanie ESP-NOW; Tryb prowadzenia i podążania (sterowanie ręczne); Sterowanie diodami LED; Sterowanie włączaniem/wyłączaniem zasilania 12V; Ustawienia funkcji WiFi; Ustawianie zadań startowych; Ustawienia serwomechanizmów magistrali szeregowej; Ustawienia trybu informacji zwrotnej; Ustawienia trybu EoAT itd. (Uwaga: Proszę zapoznać się z WIKI po więcej szczegółów) |
Pokaz produktu

Wymiary
1. Ogólne informacje o wysyłce
- Oferujemy premium metody wysyłki z numerem śledzenia dla każdego zamówienia.
-
Adres wysyłki powinien być wpisany po angielsku, bez znaków specjalnych, aby ułatwić firmie kurierskiej rozpoznanie adresu w systemie. Wysyłka zostanie zrealizowana zgodnie z podanym adresem. Prosimy o powiadomienie nas o każdej zmianie adresu przed oznaczeniem zamówienia jako „Wysłane”, aby uniknąć zagubienia przesyłki.
-
Prosimy o natychmiastowy kontakt z obsługą klienta, jeśli chcesz anulować lub zmienić zamówienie. Po osiągnięciu statusu „Wysłane” zamówienie nie może być już anulowane ani zmienione. Aby uniknąć komplikacji, prosimy o ponowne sprawdzenie koszyka przed finalizacją zakupu.
-
Możemy wysłać wszystkie dostępne zamówienia w ciągu 1 dnia roboczego od potwierdzenia zamówienia.
-
Wszystkie przedmioty są sprawdzane przed wysyłką i starannie pakowane ręcznie.
-
Zgodnie ze standardową praktyką kurierską, przed podpisaniem odbioru przesyłki należy sprawdzić jej zawartość. W przeciwnym razie nie ponosimy odpowiedzialności za ewentualne uszkodzenia powstałe podczas transportu.
2. Opcje wysyłki dla Niemiec, krajów UE* i USA
(Dla produktów w magazynie w Monachium, magazynie w Long Beach)
2.1 Zamówienia o wartości nieprzekraczającej 5 €:
Opcje wysyłki:
| Opcje wysyłki | Niemcy | EU* |
|---|---|---|
|
Deutsche Post |
€6 Dostawa w ciągu 3-4 dni roboczych |
€15 Dostawa w ciągu 5-9 dni roboczych |
| Opcje wysyłki | Stany Zjednoczone kontynentalne | Stany Zjednoczone poza kontynentalne |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Dostawa w ciągu 3-7 dni roboczych |
€8.95 Dostawa w ciągu 5-9 dni roboczych |
|
UPS Express |
€13.95 Dostawa w ciągu 2-4 dni roboczych |
€17.95 Dostawa w ciągu 3-7 dni roboczych |
2.2 Opcje wysyłki dla zamówień o wartości od 5 € do 30 € w Niemczech, od 5 € do 50 € w UE lub od 5 € do 45 € w USA:*
Opcje wysyłki:
| Opcje wysyłki | Niemcy | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Dostawa w ciągu 3-4 dni roboczych |
€6 Dostawa w ciągu 5-9 dni roboczych |
|
DHL Paket |
€6 Dostawa w ciągu 2-3 dni roboczych |
€15 Dostawa w ciągu 3-7 dni roboczych |
|
DHL Express |
€14 Dostawa w ciągu 1-2 dni roboczych |
€65 Dostawa w ciągu 2-3 dni roboczych |
| Opcje wysyłki | Stany Zjednoczone kontynentalne | Stany Zjednoczone poza kontynentalne |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Dostawa w ciągu 3-7 dni roboczych |
€6.95 Dostawa w ciągu 5-9 dni roboczych |
|
UPS Express |
€11.95 Dostawa w ciągu 2-4 dni roboczych |
€13.95 Dostawa w ciągu 3-7 dni roboczych |
2.3 Opcje darmowej wysyłki dla zamówień o wartości powyżej 30 € w Niemczech, 50 € w UE* lub 45 € w USA:
| Opcje darmowej wysyłki | Niemcy | EU* |
|---|---|---|
|
Deutsche Post |
Darmowa powyżej 30 € | Darmowa powyżej 50 € |
|
DHL Paket |
+ 2 € powyżej 30 € / Darmowa powyżej 60 € | + 8 € powyżej 50 € / Darmowa powyżej 80 € |
|
DHL Express |
+ 10 € powyżej 30 € | + 60 € powyżej 50 € |
| Opcje darmowej wysyłki | Stany Zjednoczone kontynentalne | Stany Zjednoczone poza kontynentalne |
|---|---|---|
|
USPS Ground Advantage |
Darmowa powyżej 45 € | Darmowa powyżej 60 € |
|
UPS Express |
+ 8,95 € powyżej 45 € | + 11,95 € powyżej 45 € |
-
Niektóre kraje UE nie są uwzględnione w naszej definicji strefy UE: Wielka Brytania (z wyłączeniem Irlandii), Szwajcaria, Liechtenstein, Watykan, Albania, Białoruś, Norwegia, Ukraina i Islandia. Dla powyższych krajów obowiązuje Międzynarodowa zasada wysyłki.
- Regiony w Stany Zjednoczone poza kontynentalne obejmują: Alaska, Samoa Amerykańskie, Guam, Hawaje, Wyspy Marshalla, Północne Wyspy Marianów, Palau, Portoryko, Wyspy Dziewicze Stanów Zjednoczonych, Siły zbrojne Ameryki, Siły zbrojne w Europie, Siły zbrojne na Pacyfiku, oraz Wyspy zamorskie USA. Wysyłka i dostawa do tych obszarów podlegają Zasady wysyłki do obszarów poza kontynentalnymi Stanami Zjednoczonymi.
2.4 Opcje wysyłki do krajów międzynarodowych:
(za pośrednictwem Deutsche Post lub YunExpress)
| Kwota zamówienia | Międzynarodowa |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| 50 € i więcej | €4 |
Ważna informacja:
- Prosimy o weryfikację lokalizacji zapasów na stronie produktu przed złożeniem zamówienia, aby potwierdzić terminy dostawy.
- Dla produktów w magazynie w Shenzhen zazwyczaj najpierw wysyłamy je z magazynu w Shenzhen do naszego magazynu w Monachium lub Long Beach, co zajmuje około 1,5 tygodnia. Po otrzymaniu przesyłki w Monachium/Long Beach wyślemy przedmioty do Ciebie. Wysyłkę YunExpress z Shenzhen organizujemy tylko dla zamówień z produktami z magazynu w Shenzhen o wartości powyżej 50 €.
- Jeśli jeśli złożysz zamówienie na produkty zarówno z magazynów w Monachium, jak i Shenzhen, najpierw wyślemy produkty z magazynu w Monachium, a pozostałe produkty prześlemy do Ciebie, gdy tylko otrzymamy je z Shenzhen.
3. Magazyn międzynarodowy
3.1 Niemiecki magazyn
3.2 Magazyn w USA
3.3 Magazyn w Chinach
4. Cła i podatki
4.1 Jak OpenELAB obsługuje cła przy imporcie lub eksporcie?
4.2 Jak naliczany jest VAT, gdy klient składa zamówienie w OpenELAB?
4.3 Jakie opłaty będą naliczane oprócz VAT?
Data wejścia w życie: 7 sierpnia 2025
W OpenELAB zobowiązujemy się do dostarczania dokładnych opisów produktów i wysokiej jakości wyrobów. Jeśli napotkasz jakiekolwiek problemy z zakupem, prosimy o powiadomienie nas w ciągu 30 dni od daty wysyłki.
1. Zrzeczenie się gwarancji
O ile nie jest to wyraźnie określone w konkretnej umowie lub zamówieniu, OpenELAB nie udziela żadnych gwarancji — wyraźnych ani dorozumianych — dotyczących przydatności, odpowiedniości lub zbywalności jakiegokolwiek produktu do określonego celu lub specjalnego zastosowania.
2. Polityka gwarancyjna
Okres gwarancji
Standardowy okres gwarancji na produkty sprzedawane przez OpenELAB wynosi 12 miesięcy od daty dostawy.
W ramach tej gwarancji OpenELAB dołoży rozsądnych starań, aby naprawić lub wymienić produkty bezpłatnie, jeśli wady wynikają z problemów z surowcami, projektem lub produkcją.
Jeśli wada kwalifikuje się zgodnie z tą polityką, ale wykracza poza zakres objęty ochroną, mogą obowiązywać rozsądne opłaty za naprawę lub wymianę.
Po okresie gwarancji wsparcie może być nadal dostępne za rozsądną opłatą.
Wyłączenia gwarancji
Gwarancja nie obowiązuje w następujących przypadkach:
- Produkt jest poza 12-miesięcznym okresem gwarancji.
- Uszkodzenia spowodowane niewłaściwym użyciem, nieprawidłową konserwacją lub przechowywaniem albo nieprzestrzeganiem przewodnika użytkownika lub instrukcji.
- Problemy spowodowane zdarzeniami siły wyższej (np. klęski żywiołowe, wojna, zmiany prawne itp.).
- Nieautoryzowane próby naprawy przez klienta.
- Produkt nie jest wadliwy, ale został otwarty i zgodnie z polityką nie podlega zwrotowi.
3. Zwroty i refundacje
Jeśli nie jesteś zadowolony z zakupu, możesz być uprawniony do zwrotu lub wymiany:
- Zwrot na zwrot pieniędzy: W ciągu 15 dni od otrzymania (nieotwarte).
- Zwrot na wymianę: W ciągu 30 dni od otrzymania (uszkodzone lub wadliwe).
- Okres wymiany: Do 30 dni od otrzymania.
Prosimy o kontakt mailowy pod adresem info@openelab.io uzyskaj autoryzację zwrotu przed odesłaniem czegokolwiek.
Warunki zwrotu
- Przedmioty muszą być w oryginalnym, czystym i nienaruszonym stanie z nienaruszonym opakowaniem.
- Zwroty uszkodzonych, używanych, porysowanych, zmodyfikowanych lub zaprogramowanych przedmiotów nie będą akceptowane.
- Dołącz paragon, krótką notatkę z imieniem i nazwiskiem, numerem zamówienia oraz powodem zwrotu.
Wysyłka i opłaty
- Klienci są odpowiedzialni za koszty wysyłki zwrotnej do naszych magazynów w Europie, USA lub Chinach.
- Jeśli zwrot jest żądany z powodu powodów klienta (np. zmiana zdania, błędne zamówienie itp.), zarówno oryginalny koszt wysyłki , jak i koszt wysyłki zwrotnej zostaną potrącone z kwoty zwrotu.
- W przypadku zwrotów z powodu powodów klienta, wygenerujemy i udostępnimy etykietę zwrotną do wysyłki.
Opłaty platform płatniczych
Za wszystkie zwroty żądane z powodów klienta, od kwoty zwrotu zostanie potrącona standardowa opłata serwisowa, pobierana przez platformy płatnicze. Konkretne opłaty są następujące:
Shopify Payments: 1,8% + 0,3 €
PayPal: 4,4%
