



















































































































Waveshare Hoog koppel Seriële Bus Servo RoArm-M2 Desktop Robotarm Kit
Pre-order
Gratis verzending vanaf 30€ in Duitsland, 50€ in de EU!
- Pre-orders worden binnen 5 werkdagen verzonden.
- Levertijd voor EU- en VS-landen: 10 werkdagen.
- Levertijd voor andere landen: 15 werkdagen.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Waveshare Hoog koppel Seriële Bus Servo RoArm-M2 Desktop Robotarm Kit
RoArm-M2
4-DOF Hoge-Koppel Seriële Bus Servo Robotarm
Ondersteunt flexibele uitbreiding en secundaire ontwikkeling

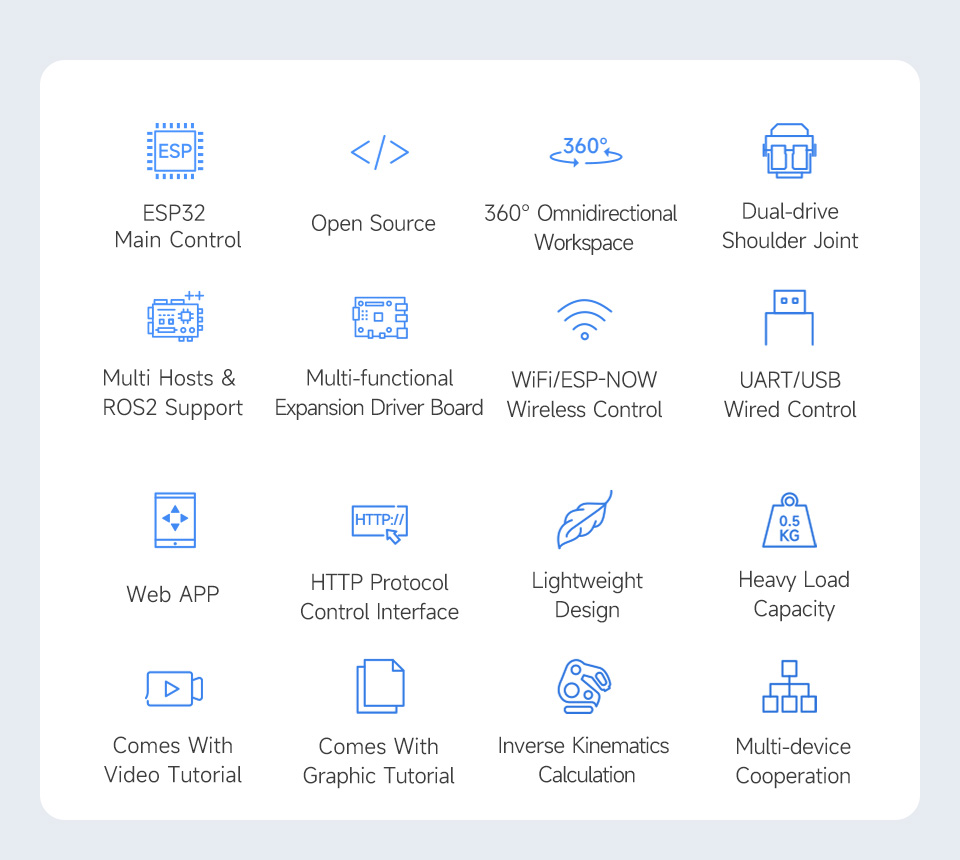
Kenmerken in één oogopslag
RoArm-M2 serie is een 4DOF slimme robotarm ontworpen voor innovatieve toepassingen. Neemt een lichtgewicht structuurontwerp aan met een totaalgewicht van minder dan 900g en een effectieve draaglast van [email protected], het kan flexibel worden gemonteerd op diverse mobiele platforms. Neemt een 360° omnidirectionele basis aan gecombineerd met drie flexibele gewrichten om een werkruimte met een diameter van 1 meter te creëren.
Het directe aandrijvingsontwerp van het gewricht verbetert de herpositioneringsnauwkeurigheid en verhoogt ook de structurele betrouwbaarheid, met innovatieve dubbele aandrijftechnologie die het koppel van het schoudergewricht verdubbelt. Het onboard ESP32 MCU hoofdregelmodule ondersteunt meerdere draadloze besturingsmodi, biedt besturingsinterfaces en rijke communicatieprotocollen voor eenvoudige aansluiting op diverse apparaten.
Biedt een gebruiksvriendelijke en platformonafhankelijke WEB-applicatie die een eenvoudige en gevisualiseerde coördinatenbesturingsmodus integreert, waardoor het gemakkelijker wordt om te beginnen. Wordt geleverd met uitgebreide grafische en video tutorials om je snel te helpen leren en gebruiken. Compatibel met ROS2 en diverse hostcomputers, ondersteunt verschillende draadloze en bekabelde communicatiemodi. Wordt geleverd met een uitbreidingsplaat, ondersteunt het aanpassen van de EoAT (End of Arm Tooling) om te voldoen aan innovatieve toepassingsvereisten.
RoArm-M2 serie bereikt een uitstekende balans tussen lichtgewicht, gebruiksvriendelijkheid, uitbreidbaarheid en open innovatie, het is een multifunctionele robotarm die intelligente besturing, mens-machine interactie en aanpasbare ontwikkeling integreert. Ideaal voor toepassingen die een combinatie van flexibiliteit, uitbreidbaarheid en gebruiksvriendelijkheid vereisen.
Versie-opties
Biedt opties voor RoArm-M2-S / RoArm-M2-Pro. De geüpgradede versie RoArm-M2-Pro is uitgerust met volledig metalen ST3235 busservomotoren, biedt een robuuster lichaam en stabiele speling die niet toeneemt bij gebruik, wat de duurzaamheid van het product verbetert.

Parametervergelijking
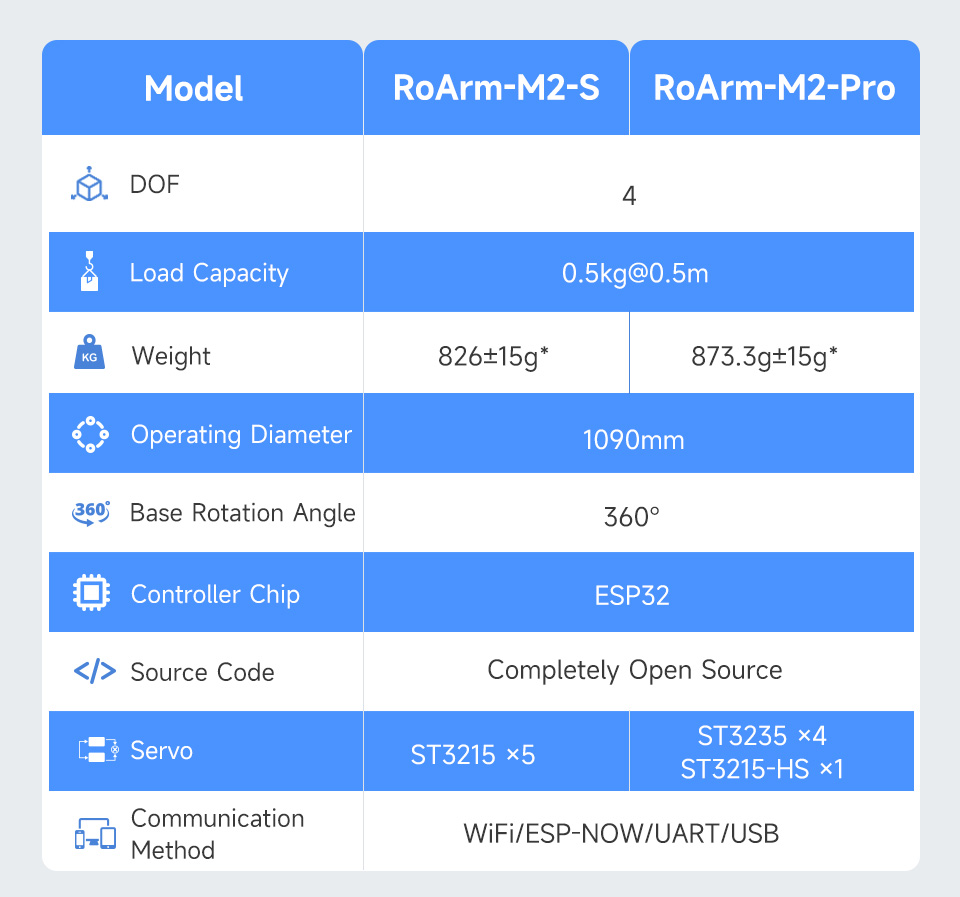
* Exclusief het gewicht van de tafelklem (290g).
Meerdere EoAT montagemethoden
De EoAT ondersteunt diverse montagemethoden, kan worden gebruikt als een klem of als de vierde bewegingsvrijheidsgraad. Biedt open-source DXF- en 3D-modellen voor doe-het-zelf en secundaire ontwikkeling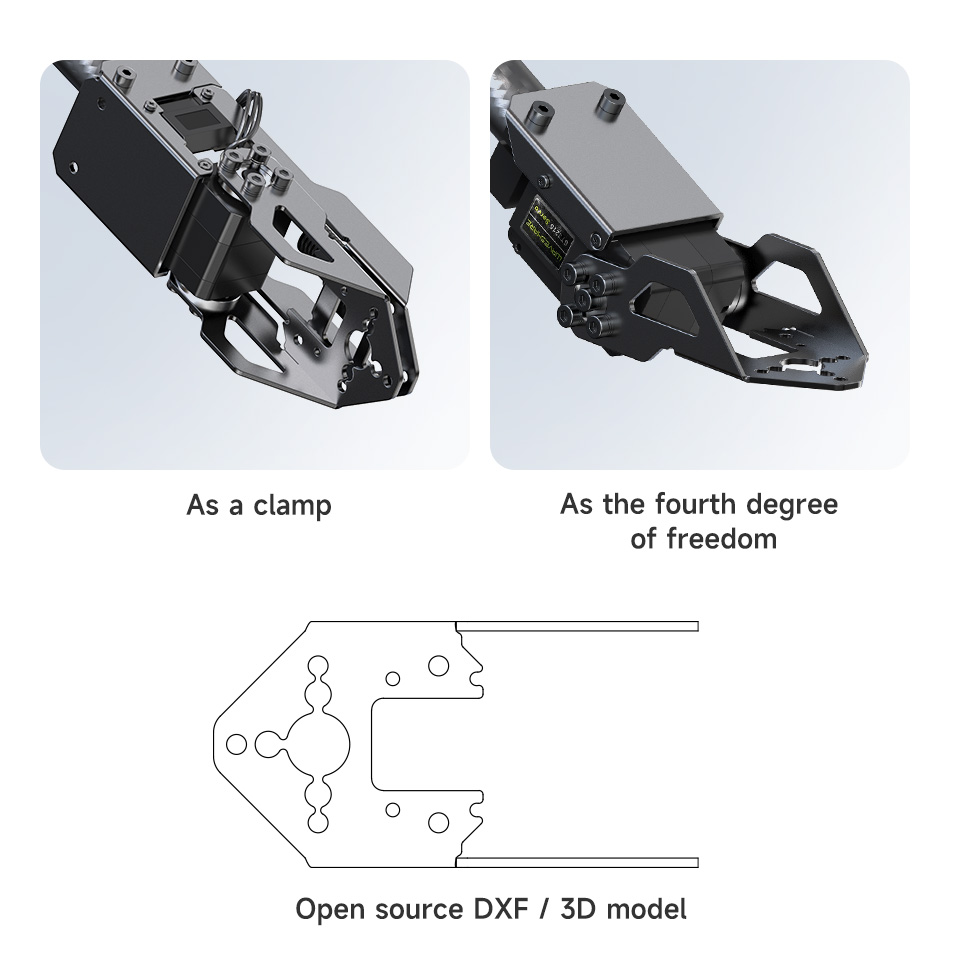
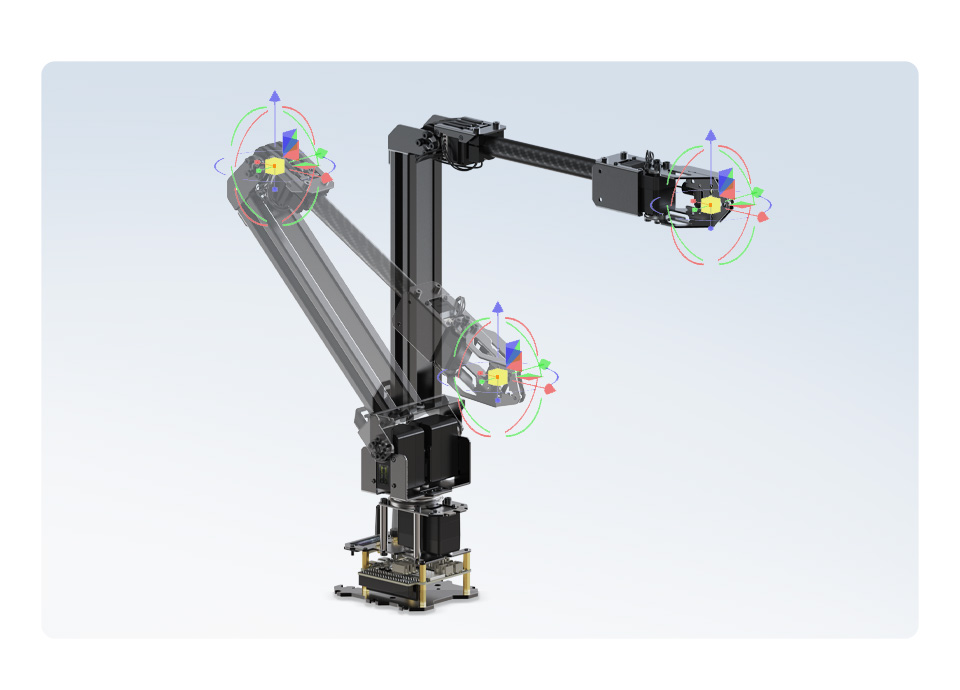
Flexibele gewrichten × omnidirectionele ruimte
Neemt een 360° draaibasis en flexibele gewrichten aan om een omnidirectionele werkruimte met een diameter van 1 meter te creëren, waardoor de EoAT vrij in alle richtingen kan bewegen
Gemakkelijk te bedienen via
Cross-platform webapplicatie
Geen app-installatie vereist, toegang na het invoeren van het adres. Hiermee kunnen gebruikers RoArm-M2 verbinden en bedienen via mobiele telefoons, tablets en computers door op de knoppen in de Web App te klikken. Ondersteunt secundaire ontwikkeling van deze open-source Web App om de gebruikersinterface aan te passen en nieuwe functies toe te voegen.
Volledig open source voor
secondary development
Volledig open source voor de besturingscodes en communicatie-interface documenten van de Roarm-M2 serie, ondersteunt meerdere talen en apparaten voor secundaire ontwikkeling. Biedt gemoduleerde demo's en tutorials voor gebruikers zonder voorkennis, gemakkelijk te starten.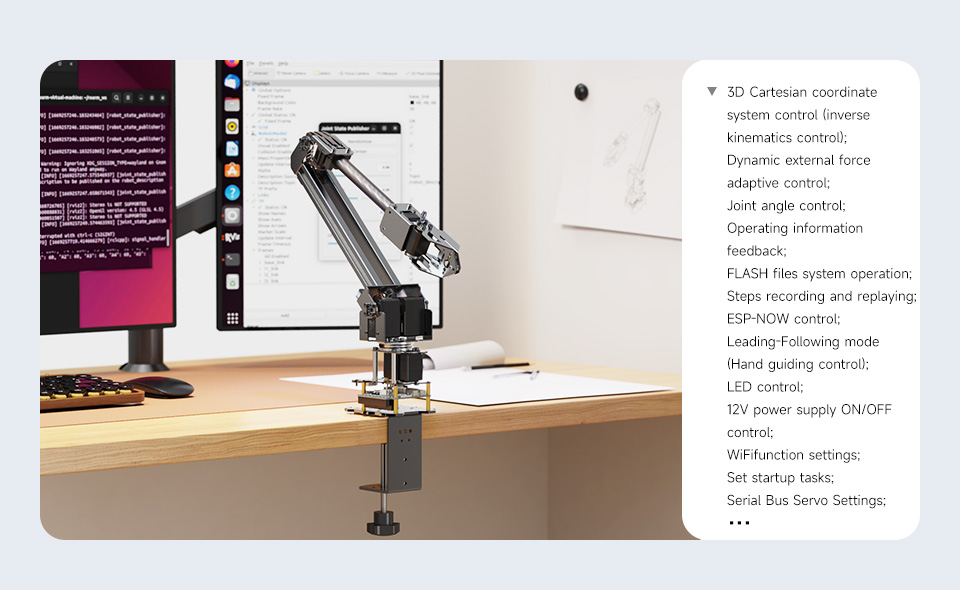
Lichtgewicht lichaam, uitstekende draagkracht
lichtgewicht lichaam met een totaalgewicht van minder dan 900g, gebruikt koolstofvezel
en 5052 aluminiumlegering om stabiliteit onder zware belastingen te garanderen,
geschikt voor diverse mobiele robotchassis

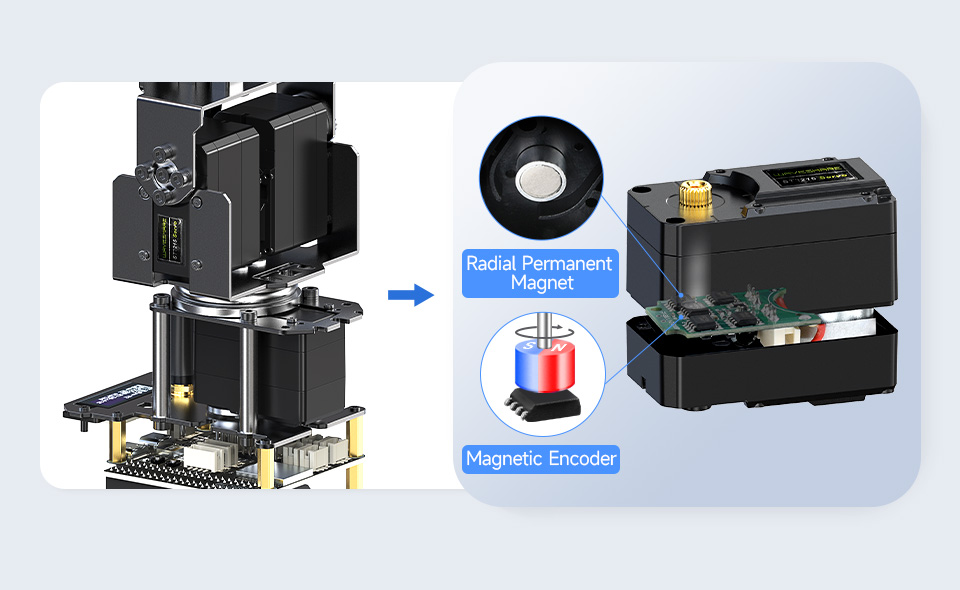
Directe aandrijving van het gewricht ontwerp
De feedbacknauwkeurigheid tot 0,088°
De gewrichtshoekfeedback kan direct worden verkregen via een 12-bits hoogprecisie magnetische encoder zonder reductiegroepen, wat nauwkeuriger is, en de werkelijke positie van het huidige doelpunt kan worden berekend op basis van de gewrichtshoekfeedback.
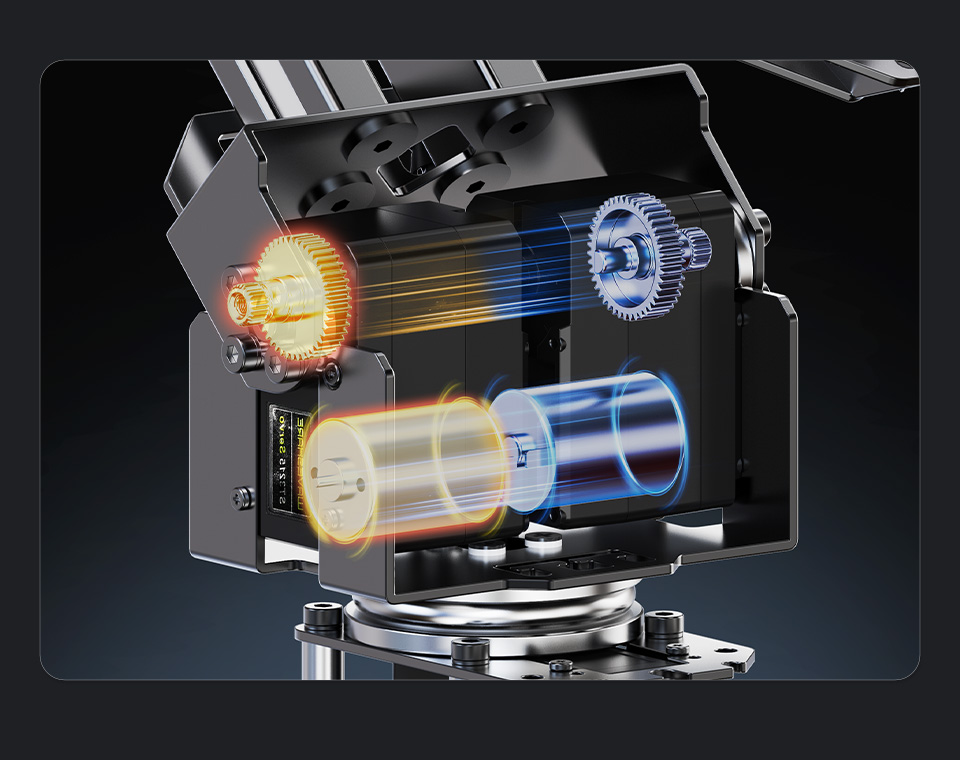
Innovatieve dual-drive technologie
verdubbelt het koppel van het schoudergewricht
We hebben een dual-drive regelalgoritme ontwikkeld dat de twee servo's bij het schoudergewricht in staat stelt hun uitgangskoppel effectief te coördineren, wat de
de kracht en de totale belastingscapaciteit van de RoArm-M2 Serie
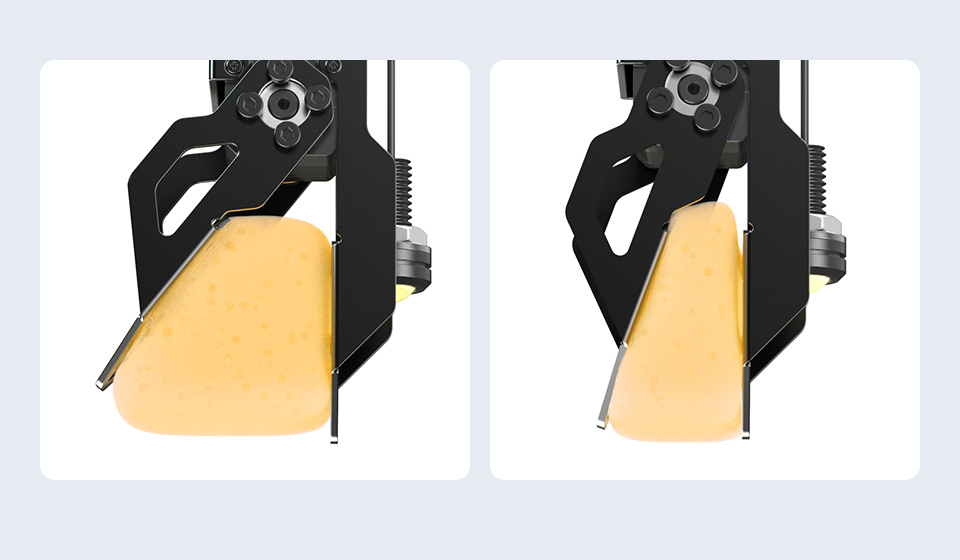
Direct-aangedreven klem maakt nauwkeurige
krachtregeling
Het direct-aangedreven klemontwerp maakt nauwkeurige regeling van de klemkracht in het programma mogelijk, geschikt voor het klemmen van delicate objecten zonder overmatige kracht uit te oefenen
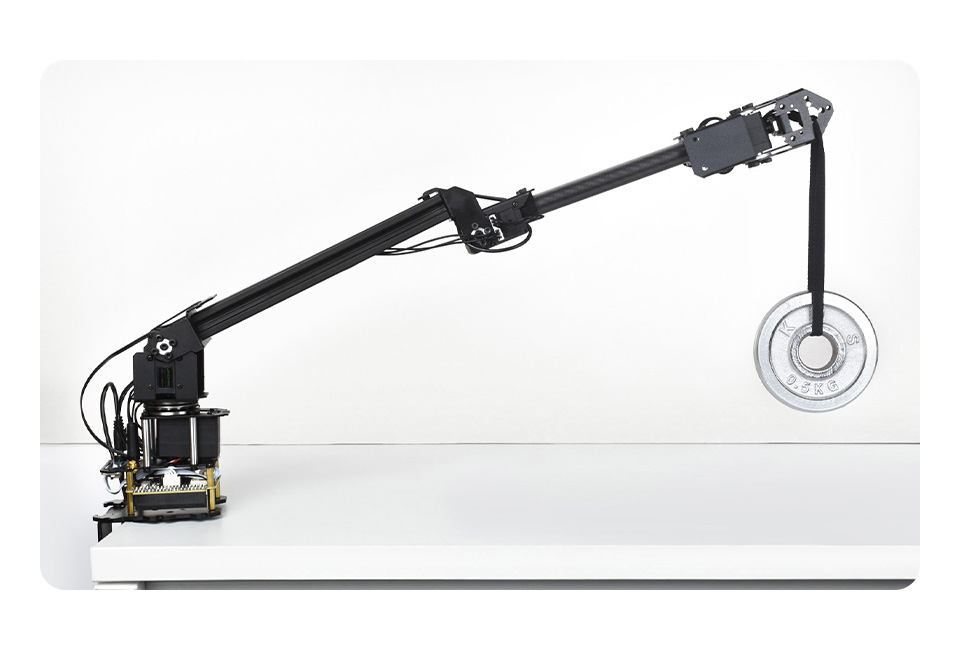
Ondersteunt het installeren van rubberen banden
om de invloed te compenseren
van de zwaartekracht
De SCHOUWDER- en ELLEBOOG-gewrichten ondersteunen het installeren van rubberen banden om de robotarm te assisteren, door gebruik te maken van de elastische contractie van rubberen banden om de invloed van de zwaartekracht te compenseren en de effectieve belasting van de robotarm te verhogen.
Dynamische uitwendige kracht
adaptieve regeling
Na het inschakelen van deze functie kunt u het maximale koppel voor elk gewricht beperken. Wanneer de uitwendige kracht die op het gewricht wordt uitgeoefend het koppel-drempelniveau (instelbaar) overschrijdt, zal de robotarm reageren op de uitwendige kracht door te draaien, en zal terugkeren naar de opgegeven positie wanneer de uitwendige kracht onder de koppel-drempel daalt.

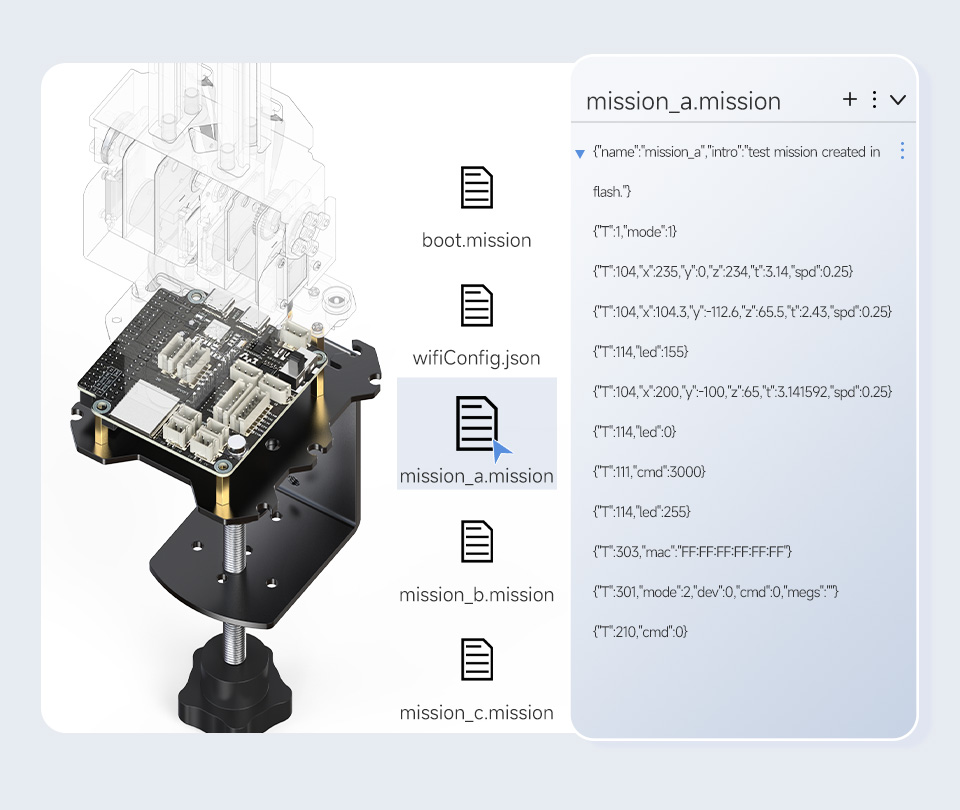
Automatisch opnemen met één klik
Gemakkelijk acties aanmaken
RoArm-M2 kan JSON-instructies voor robotbesturing opslaan als taakbestanden. De taakbestanden kunnen worden opgeslagen in de Flash van ESP32, die niet verloren gaan bij stroomuitval. De robotarm kan complexe en repetitieve handelingen uitvoeren door deze taakbestanden aan te roepen.
Nauwkeurig het doel bereiken door de coördinaten in te voeren
Open source voor inverse kinematica regelalgoritme in het driedimensionale Cartesische coördinatensysteem. Na het invoeren van de doelpositie kan de robotarm het doelpunt nauwkeurig bereiken door de inverse kinematica functie te gebruiken om de rotatiehoek van elk gewricht te berekenen.
Boog-snelheidsregeling voor
Soepelere beweging
We gebruiken het curve velocity control-algoritme om de robotarm vloeiender en natuurlijker te laten bewegen, zonder oscillaties bij starten en stoppen

ESP-NOW draadloze besturing
Samenwerking op afstand met lage vertraging
ESP-NOW is een draadloos communicatieprotocol met lage vertraging en ad hoc, zonder de noodzaak van netwerkinfrastructuren. U kunt één robotarm gebruiken om draadloos andere robotarmen te besturen, en de bedieningsmethoden kunnen worden ingesteld als broadcast-besturing, groepsbesturing en één-op-één-besturing.
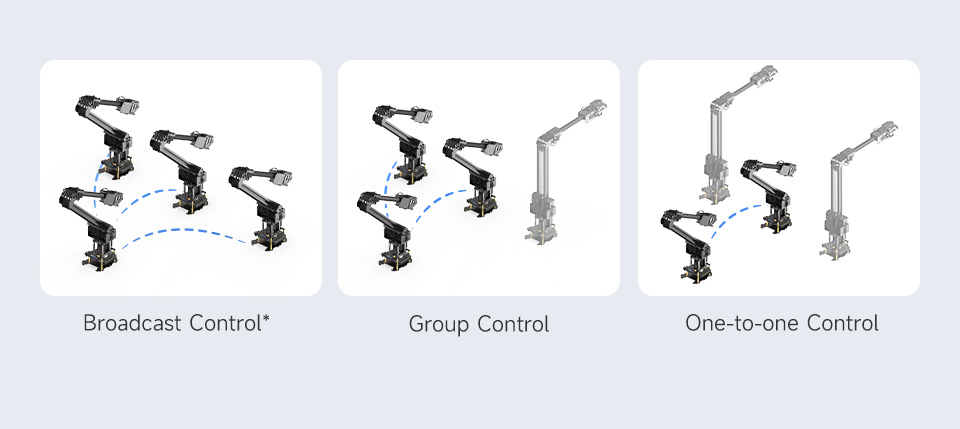
* Opmerking: de broadcast-besturing heeft geen limiet voor het aantal bestuurde apparaten, terwijl de groepsbesturing tot 20 apparaten toestaat. Raadpleeg de WIKI voor meer details.
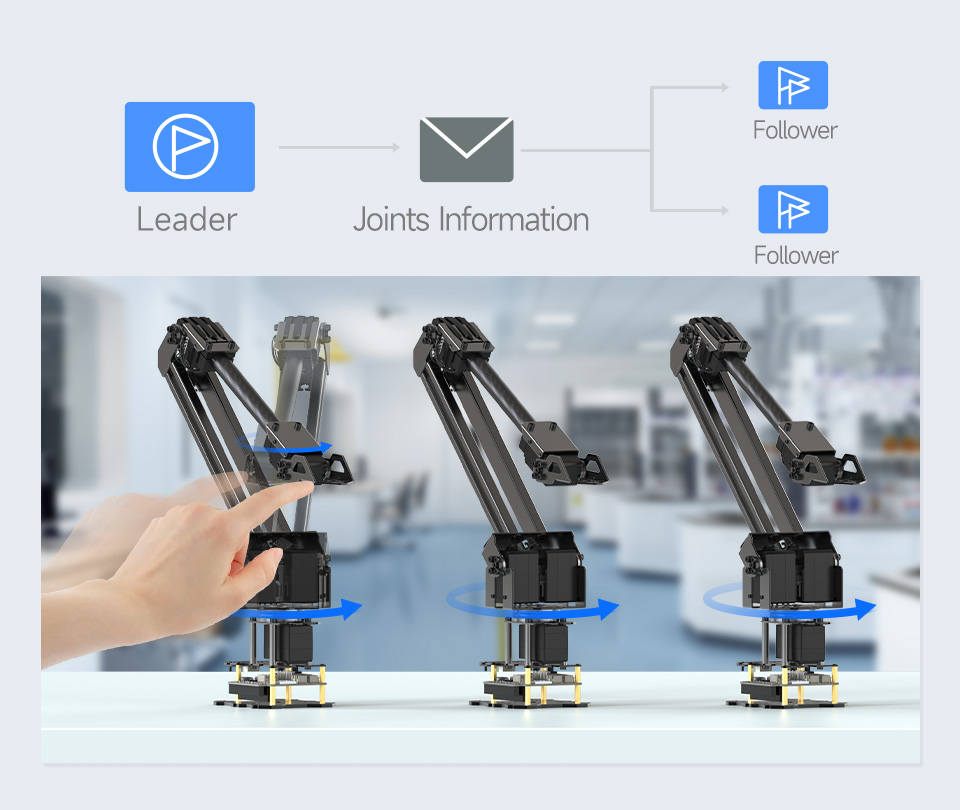
Ondersteunt leider-volger bedieningsmodus gebaseerd op ESP-NOW
In de leider-volger bedieningsmodus stuurt de leider-robotarm zijn gewrichtshoekinformatie naar andere robotarmen via ESP-NOW-communicatie. De andere robotarmen die in ESP-NOW-volgmodus staan, imiteren in realtime dezelfde acties als de leider.
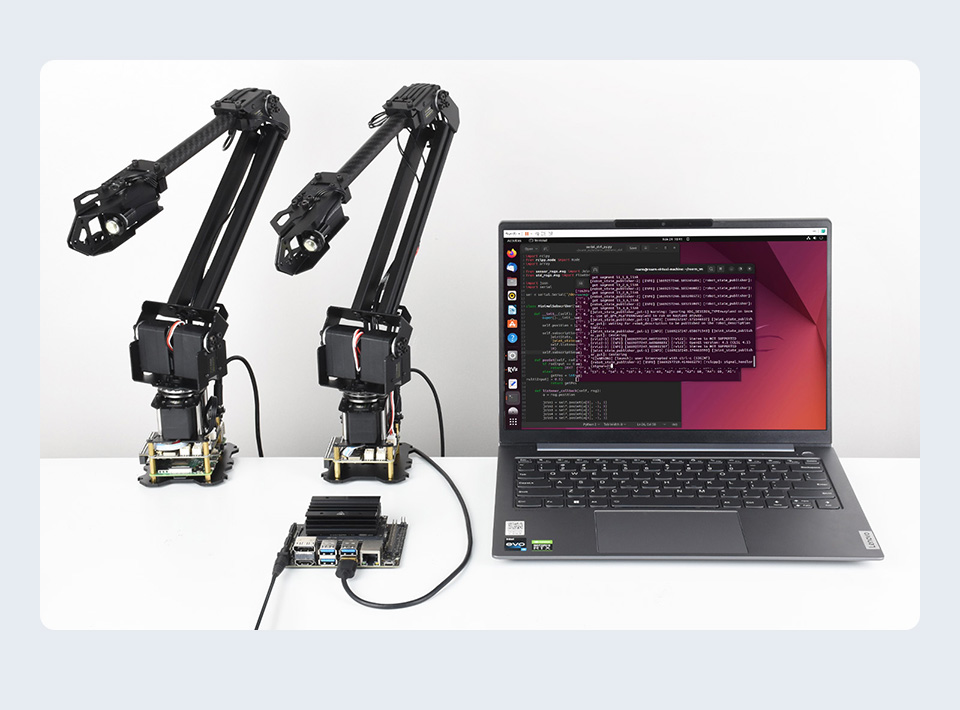
Meerdere bedieningsinterfaces,
Ondersteuning voor meerdere apparaten en talen
De RoArm-M2-serie kan niet alleen worden bestuurd via de WEB-applicatie, maar ondersteunt ook het gebruik van andere controllers om JSON-commando's te verzenden via HTTP-protocol netwerkverzoeken, seriële communicatie of USB-communicatie voor besturing en feedback.
Meerdere installatiemethoden voor integratie in uw toepassing
Biedt meerdere installatieschema's en gerelateerde secundaire ontwikkelingsbronnen, geschikt voor verschillende gebruiksscenario's en kan flexibel worden geïntegreerd in uw projecten en toepassingen

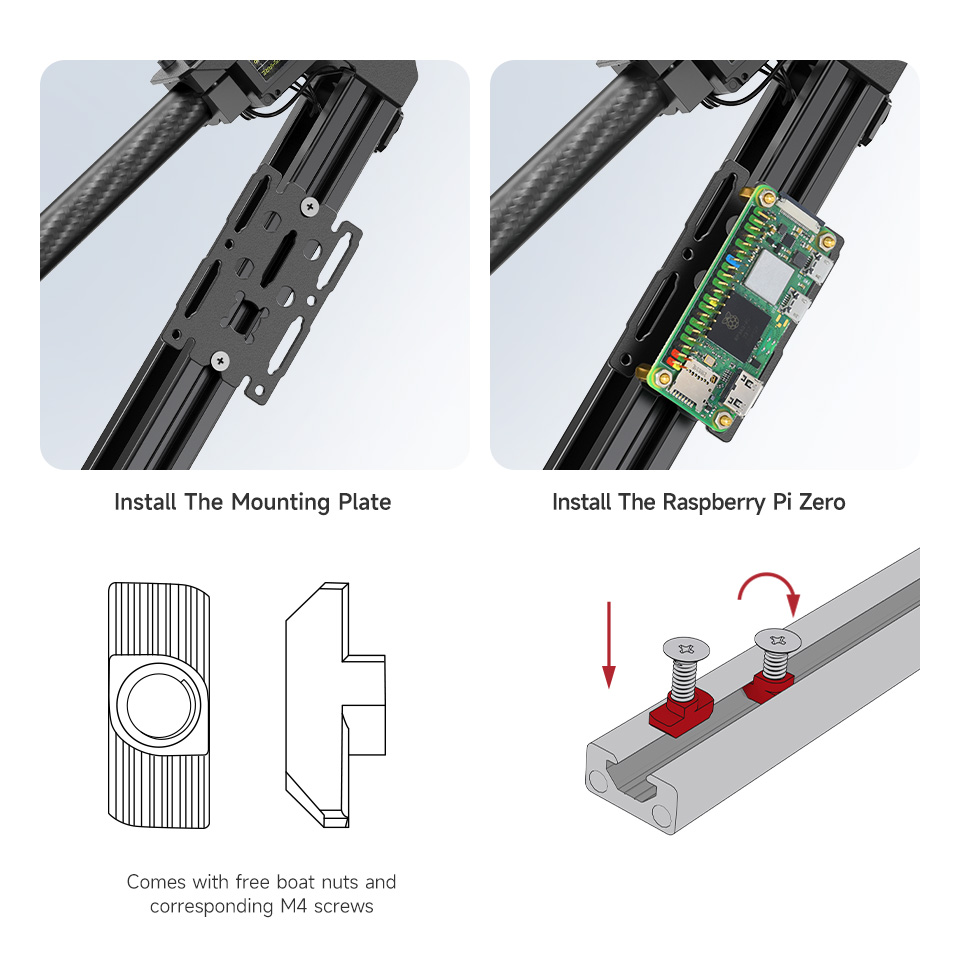
Gemakkelijk verschillende randapparatuur te installeren
De hoofdstructuur van de bovenarm maakt gebruik van twee 1020 Europese standaard aluminium rails, ondersteunt het installeren van extra randapparatuur via de bootmoeren om aan verschillende behoeften te voldoen. Wordt geleverd met bootmoeren en bijbehorende M4-schroeven voor eenvoudige installatie.
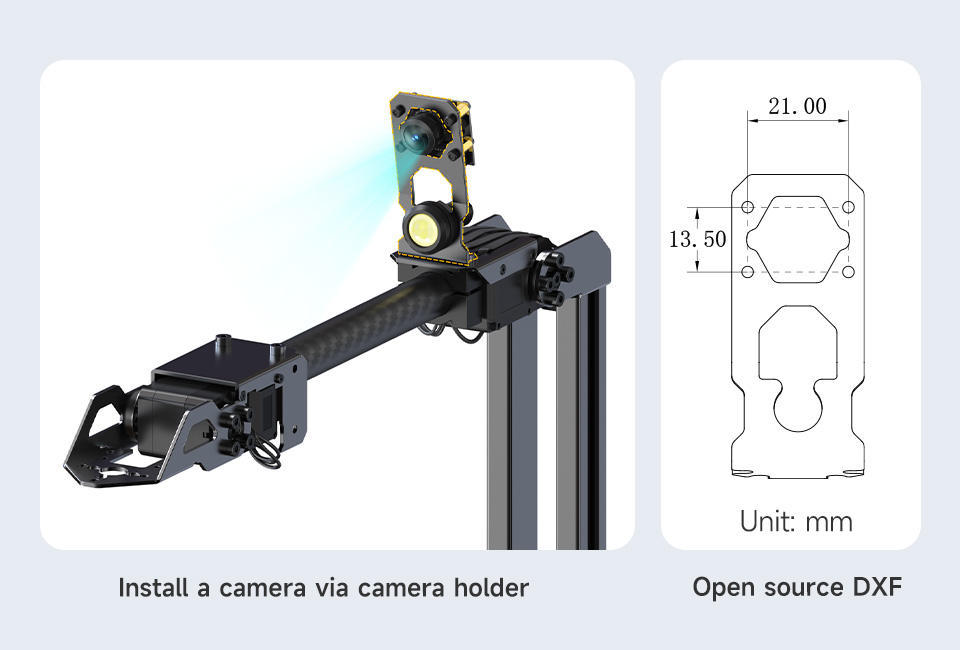
Ondersteunt het installeren van een camera
om visuele toepassingen uit te breiden
Wordt geleverd met een camerahouder en open source voor de bijbehorende tekeningen.
U kunt direct een camera met de bijbehorende maat of andere camera's installeren
met een adapter
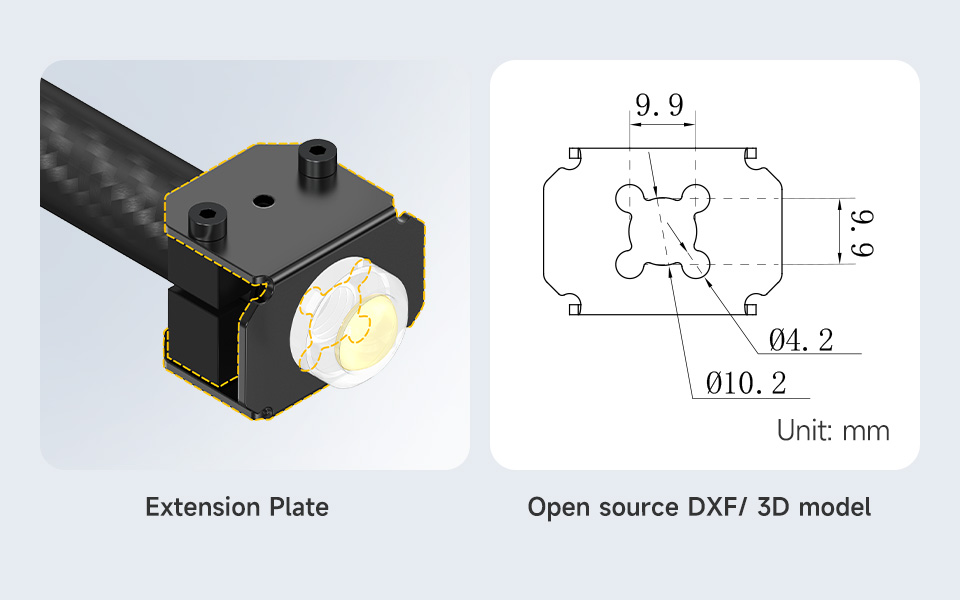
Ondersteunt het uitbreiden van verschillende EoAT
voor meer functies
Wordt geleverd met een uitbreidingsplaat, gemakkelijk voor gebruikers om verschillende EoAT uit te breiden en te vervangen
voor meer functies
Aan boord ESP32 hoofdcontrollerbord
Maakt gebruik van ESP32 krachtige hoofdcontroller MCU, ondersteunt meerdere draadloze communicatieprotocollen, met een grote hoeveelheid open source bronnen om secondary development van innovatieve toepassingen te ondersteunen
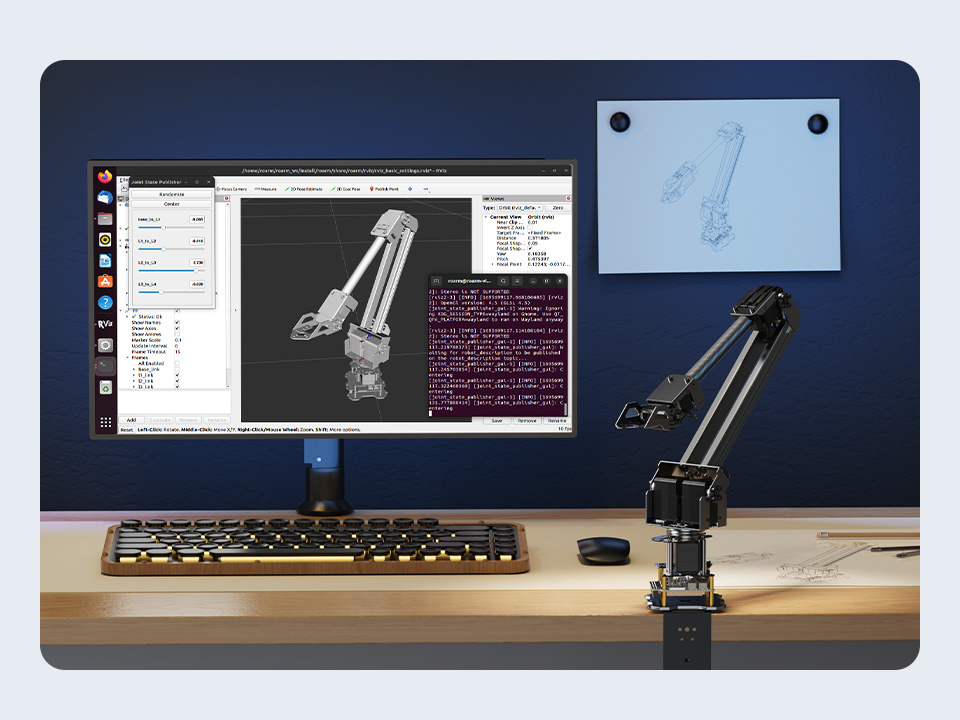
Compatibel met ROS2, biedt
modelopbouwbestand en ondersteunt
multi-device samenwerking
Biedt communicatieknooppunten van ROS2, URDF-modelbeschrijvingsbestand en zero-based tutorial van ROS2
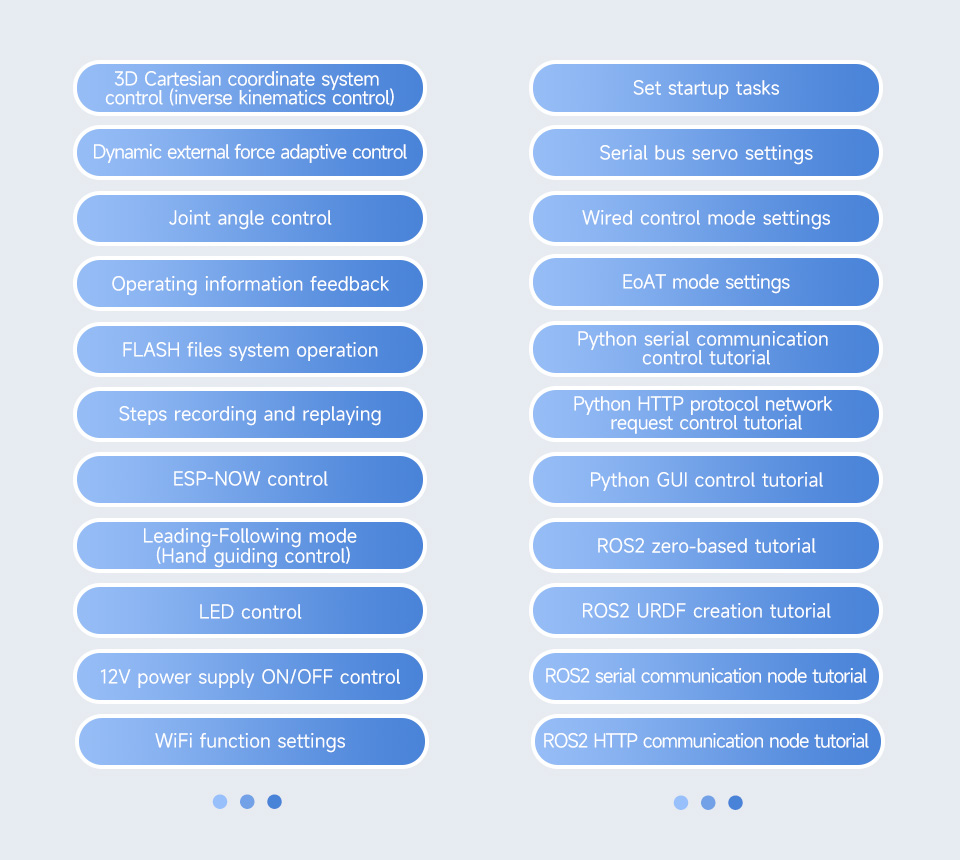
Rijke tutorialbronnen voor
secondary development
We bieden complete eenheidstutorials en cases, inclusief diverse functies en veelvoorkomende toepassingsscenario's, om gebruikers te helpen snel aan de slag te gaan met secondary development
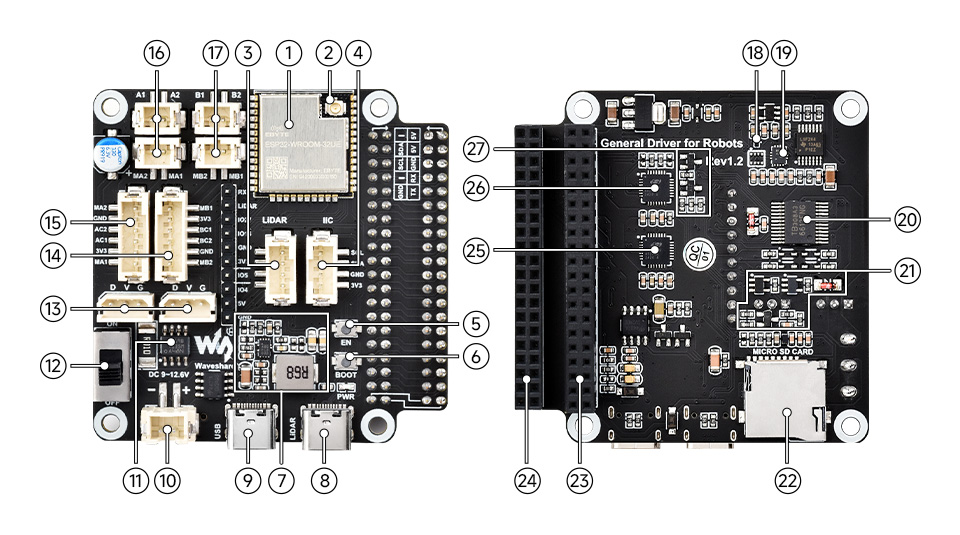
Algemeen stuurbord voor robots
Aan boord rijke interfaces en bronnen voor innovatieve ontwikkeling en functionele uitbreiding
-
ESP32-WROOM-32 controller module
Kan worden ontwikkeld met Arduino IDE -
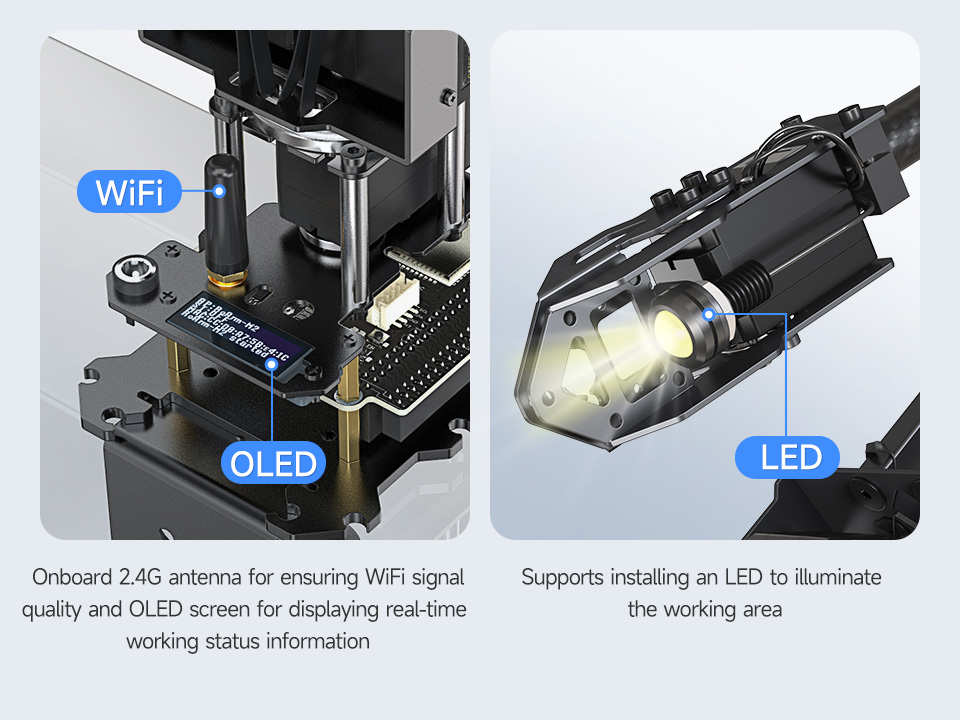
IPEX1 WIFI-connector
Voor het aansluiten van een WIFI-antenne om de draadloze communicatiestraal te vergroten -
LIDAR-interface
Geïntegreerde radaradapterfunctie -
I2C randapparaat uitbreidingsinterface
Voor aansluiting op OLED-scherm of andere I2C-sensoren -
Resetknop
Druk in en laat los om de ESP32 te herstarten -
Downloadknop
De ESP32 gaat na het inschakelen in de downloadmodus -
DC-DC 5V spanningsregelaar circuit
Voeding voor hostcomputers zoals Raspberry Pi of Jetson nano -
Type-C poort (LADAR)
LIDAR dataoverdracht -
Type-C poort (USB)
ESP32 communicatie-interface, voor het uploaden van programma's naar ESP32 -
XH2.54 stroompoort
Ondersteunt DC 7~13V ingang, kan seriële bus servo's en motoren direct van stroom voorzien -
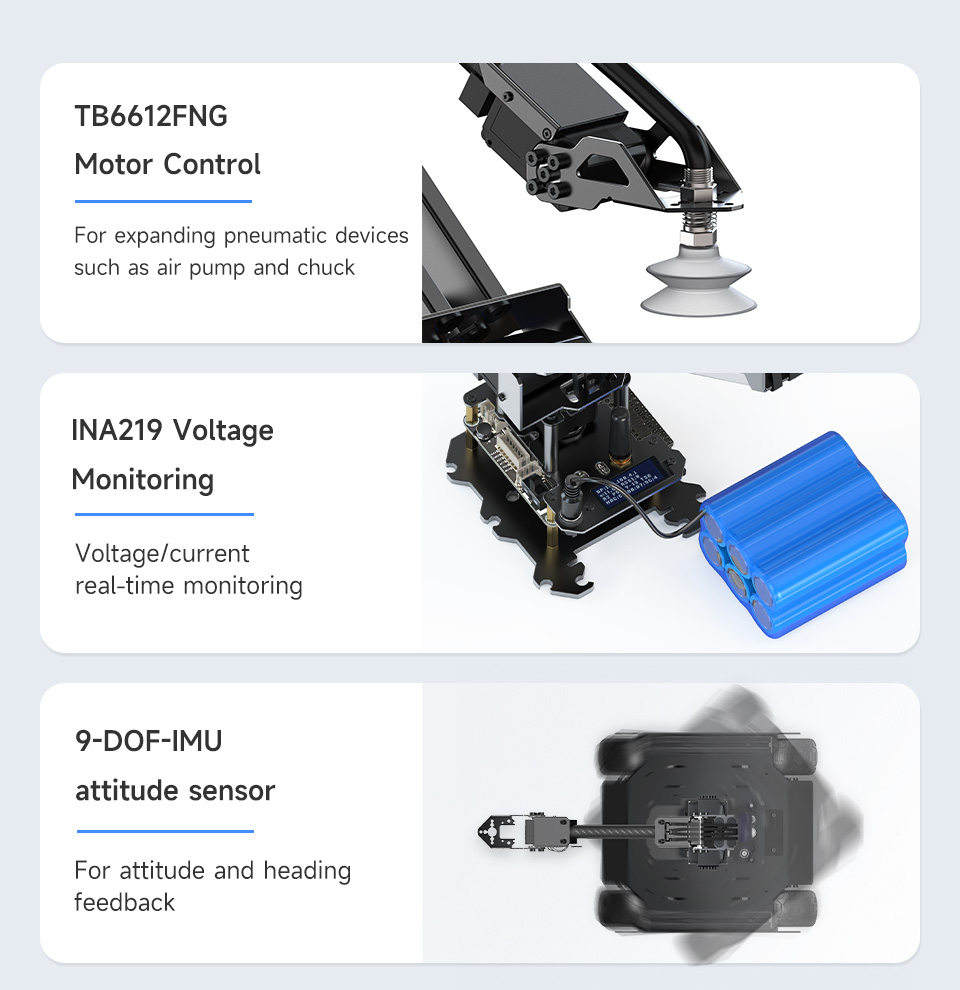
INA219
spanning/stroom bewakingschip -
Stroom AAN/UIT
Externe voeding AAN/UIT -
ST3215 seriële bus servo interface
Voor aansluiting op ST3215 seriële bus servo -
Motorinterface PH2.0 6P
Groep B interface voor motor met encoder
-
Motorinterface PH2.0 6P
Groep A-interface voor motor met encoder -
Motorinterface PH2.0 2P
Groep A-interface voor motor zonder encoder -
Motorinterface PH2.0 2P
Groep B-interface voor motor zonder encoder -
AK09918C
3-assig elektronisch kompas -
QMI8658C
6-assige bewegingssensor -
TB6612FNG
Motorbesturingschip -
Seriële bus servo besturingscircuit
voor het aansturen van meerdere ST3215 seriële busservomotoren en het verkrijgen van servomotorfeedback -
TF-kaartsleuf
Kan worden gebruikt om logs of WIFI-configuraties op te slaan -
40PIN GPIO-header
Voor aansluiting op Raspberry Pi of andere hostborden -
40PIN uitgebreide header
Gemakkelijk te gebruiken GPIO-pinnen van Raspberry Pi of andere hostborden -
CP-2102
UART naar USB, voor radargegevensoverdracht -
CP-2102
UART naar USB, voor ESP32-communicatie -
Automatisch downloadcircuit
Voor het uploaden van programma's naar de ESP32 zonder de EN- en BOOT-knoppen in te drukken
Gediversifieerde onboard bronnen
Ondersteunt functie-uitbreiding
Geïntegreerde TB6612FNG motorstuur-IC, INA219 batterijspanningsmonitoring en 9-assig
IMU-sensor, ondersteunt functie-uitbreiding en innovatie
Muisklik en sleep interactie
Biedt webapplicaties en desktopsoftware (open-source programma's ontwikkeld in Python), ondersteunt het instellen van actie-instructies bij het indrukken en loslaten van de muis
om de robotarm flexibel te besturen

Specificaties
| DOF | 4 |
|---|---|
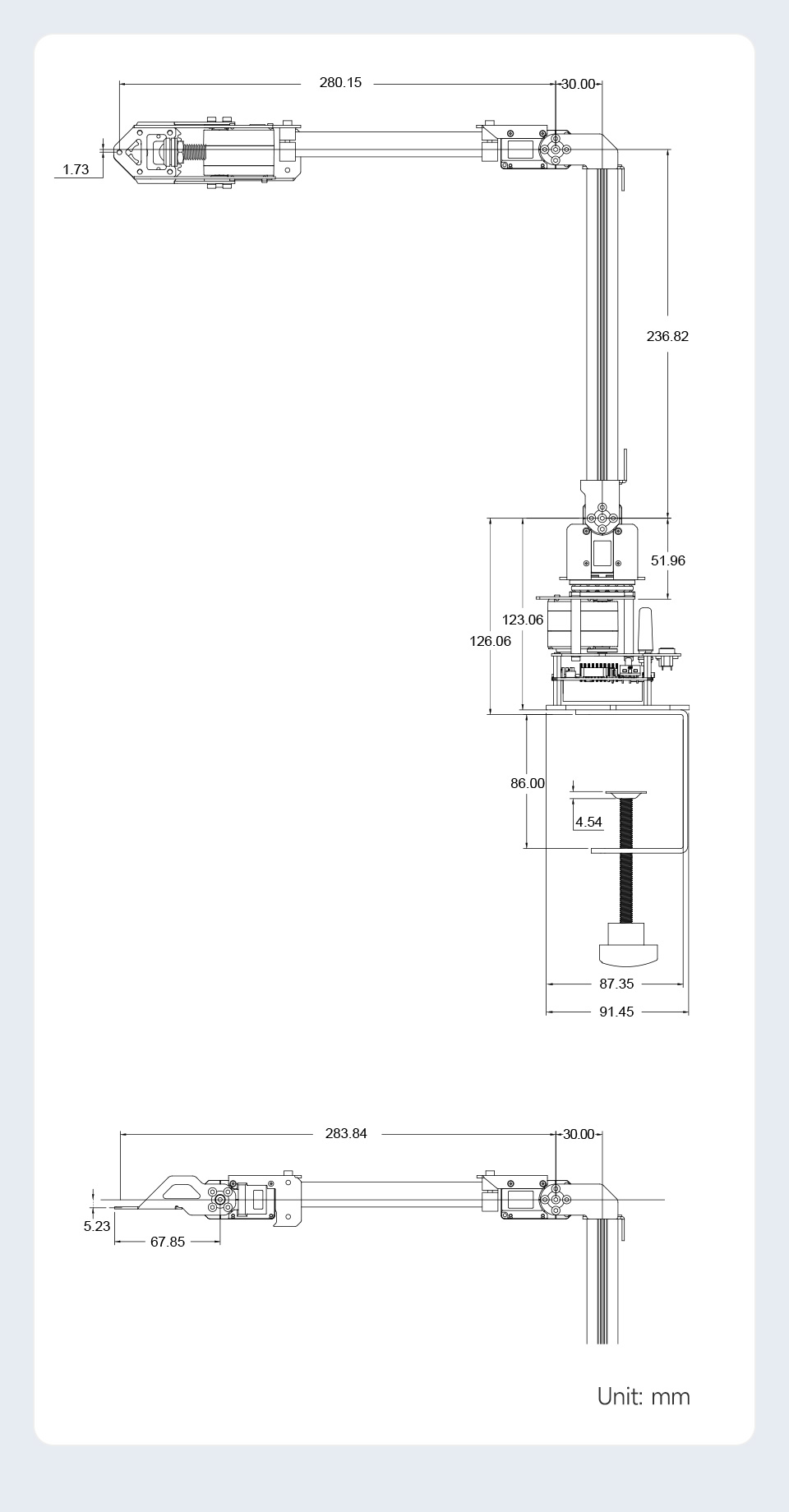
| Werkruimte | Horizontale diameter: 1090mm (Max, 360° omnidirectioneel), Verticaal: 798mm (Max) |
| Bedrijfsspanning | 12V 5A voeding, ondersteunt 3S Lithiumbatterijen (NIET inbegrepen) |
| Draagvermogen | 0.5kg@0.5m |
| herpositioneringsnauwkeurigheid | ≈±4mm (onder dezelfde belasting) |
| Servo rotatiesnelheid | 40rpm (zonder belasting, zonder koppelbegrenzing) |
| Bedieningsbereik | BASE-360°, SCHOUWDER-180°, ELLEBOOG-180°, HAND-135°/270° |
| Aandrijvingstype | TTL-seriële busservo, direct aangedreven gewricht |
| Aantal servo's | 5 |
| Gewrichtshoeksensor | 12-bit 360° magnetische encoder |
| Servomoment | 30KG.CM @12V |
| Gewricht feedbackinformatie | servo status, gewrichtshoek, rotatiesnelheid, gewrichtslast, servospanning, servostroom, servotemperatuur en servo werkmodus |
| Hoofdcontrole | ESP32-WROOM-32 |
| Kenmerken van het hoofdregelmodule | WiFi, BT, Dual Core, 240MHz |
| Draadloze bedieningsmodus | 2.4G-WiFi, ESP-NOW |
| Bedrade bedieningsmodus | USB, UART |
| Handmatige bedieningsmodus | WEB-bedieningsinterface |
| Host-bedieningsmodus | UART/USB/ESP-NOW*/HTTP-communicatie via JSON-gegevensformaatcommando's (* het ondersteunt geen feedbackinformatie bij gebruik van ESP-NOW-communicatie) |
| Hostondersteuning | USB-verbonden apparaten inclusief Raspberry Pi, Jetson Orin Nano en PC. |
| EoAT-functie | klemfunctie standaard, kan worden veranderd in een extra bewegingsvrijheid |
| LED-vermogen | ≤1,5W |
| OLED-schermgrootte | 0.91inch |
| Andere functies | 2-kanaals 12V voedingsschakelaar, 9-DOF IMU |
| Gewicht van de robotarm | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873,3 ±15g (exclusief de tafelrand fixatieklem) |
| gewicht van de tafelrand fixatieklem | 290g ±10g |
| Ondersteunde dikte van de tafelrand voor de klem | <72mm |
| Demo | 3D Cartesisch coördinatensysteem bediening (inverse kinematica besturing); Dynamische externe kracht adaptieve besturing; Gewrichtshoekbesturing; Bedrijfsinformatie feedback; FLASH-bestandssysteem werking; Stappen opnemen en afspelen; ESP-NOW besturing; Leidend-Volgend modus (Handgeleide besturing); LED-besturing; 12V voeding AAN/UIT besturing; WiFi functie-instellingen; Opstarttaken instellen; Seriële bus servo-instellingen; Feedback modus instelling; EoAT modus instelling, enz. (Opmerking: Raadpleeg de WIKI voor meer details) |
Productweergave

Afmetingen
1. Algemene verzendinformatie
- We bieden premium verzendmethoden met een trackingnummer voor elke bestelling.
-
Het verzendadres moet in het Engels worden ingevoerd zonder speciale symbolen om het koeriersbedrijf te helpen uw adres in het systeem te herkennen. We verzenden volgens het door u opgegeven verzendadres. Breng ons op de hoogte van eventuele adreswijzigingen voordat uw bestelling de status "Verzonden" krijgt om verlies van het pakket te voorkomen.
-
Neem onmiddellijk contact op met onze klantenservice als u een bestelling wilt annuleren of wijzigen. Zodra uw bestelling de status "Verzonden" heeft bereikt, kan deze niet meer worden geannuleerd of gewijzigd. Controleer uw winkelwagen vóór het afrekenen om complicaties te voorkomen.
-
We kunnen alle op voorraad zijnde bestellingen binnen 1 werkdag verzenden zodra uw bestelling is bevestigd.
-
Alle artikelen worden gecontroleerd vóór verzending en zorgvuldig met de hand verpakt.
-
Bij standaard koerierspraktijk moet u de inhoud van het pakket controleren voordat u tekent voor ontvangst van uw goederen. Anders kunnen wij niet aansprakelijk worden gesteld voor eventuele schade die tijdens het transport is ontstaan.
2. Verzendopties voor Duitsland, EU*-landen en VS
(Voor producten in magazijn München, magazijn Long Beach)
2.1 Bestellingen met een waarde van maximaal €5:
Verzendopties:
| Verzendopties | Duitsland | EU* |
|---|---|---|
|
Deutsche Post |
€6 Aankomst binnen 3-4 werkdagen |
€15 Aankomst binnen 5-9 werkdagen |
| Verzendopties | Continentaal VS | Niet-Continentaal VS |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Aankomst binnen 3-7 werkdagen |
€8.95 Aankomst binnen 5-9 werkdagen |
|
UPS Express |
€13.95 Aankomst binnen 2-4 werkdagen |
€17.95 Aankomst binnen 3-7 werkdagen |
2.2 Verzendopties voor een bestelwaarde tussen €5 en €30 binnen Duitsland, €5 en €50 binnen de EU, of €5 en €45 in de VS:*
Verzendopties:
| Verzendopties | Duitsland | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Aankomst binnen 3-4 werkdagen |
€6 Aankomst binnen 5-9 werkdagen |
|
DHL Paket |
€6 Aankomst binnen 2-3 werkdagen |
€15 Aankomst binnen 3-7 werkdagen |
|
DHL Express |
€14 Aankomst binnen 1-2 werkdagen |
€65 Aankomst binnen 2-3 werkdagen |
| Verzendopties | Continentaal VS | Niet-Continentaal VS |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Aankomst binnen 3-7 werkdagen |
€6.95 Aankomst binnen 5-9 werkdagen |
|
UPS Express |
€11.95 Aankomst binnen 2-4 werkdagen |
€13.95 Aankomst binnen 3-7 werkdagen |
2.3 Gratis verzendopties voor een bestelwaarde boven €30 binnen Duitsland, €50 binnen de EU* of €45 in de VS:
| Gratis verzendopties | Duitsland | EU* |
|---|---|---|
|
Deutsche Post |
Gratis boven €30 | Gratis boven €50 |
|
DHL Paket |
+ €2 voor boven €30 / Gratis boven €60 | + €8 voor boven €50 / Gratis boven €80 |
|
DHL Express |
+ €10 voor boven €30 | + €60 voor boven €50 |
| Gratis verzendopties | Continentaal VS | Niet-Continentaal VS |
|---|---|---|
|
USPS Ground Advantage |
Gratis boven €45 | Gratis boven €60 |
|
UPS Express |
+ € 8,95 voor boven €45 | + € 11,95 voor boven €45 |
-
Bepaalde EU-landen zijn niet opgenomen in onze EU-zone definitie: Verenigd Koninkrijk (exclusief Ierland), Zwitserland, Liechtenstein, Vaticaanstad, Albanië, Wit-Rusland, Noorwegen, Oekraïne en IJsland. Voor bovenstaande landen geldt de Internationale Verzendregel.
- De regio's in de Niet-Continentaal VS omvat: Alaska, Amerikaans Samoa, Guam, Hawaï, de Marshalleilanden, de Noordelijke Marianen, Palau, Puerto Rico, de Amerikaanse Maagdeneilanden, de Strijdkrachten van Amerika, de Strijdkrachten in Europa, de Strijdkrachten in de Stille Oceaan, en de Buitenliggende eilanden van de VS. De verzending en levering naar deze gebieden zijn onderhevig aan de Verzendregels voor niet-continentaal VS.
2.4 Verzendopties voor internationale landen:
(via Deutsche Post of YunExpress)
| Bestelbedrag | Internationaal |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| €50 en hoger | €4 |
Belangrijke mededeling:
- Controleer de voorraadlocatie op de productpagina voordat u uw bestelling plaatst om de levertijden te bevestigen.
- FVoor producten in het magazijn in Shenzhen verzenden we doorgaans eerst de producten van het magazijn in Shenzhen naar ons magazijn in München of Long Beach, wat ongeveer 1,5 week duurt. Nadat we de zending in München/Long Beach hebben ontvangen, sturen we de artikelen naar u. We regelen alleen YunExpress-verzending vanuit Shenzhen voor bestellingen met producten in het magazijn in Shenzhen ter waarde van meer dan €50.
- Als als u een bestelling plaatst met producten uit zowel het magazijn in München als Shenzhen, verzenden we eerst de producten uit het magazijn in München en sturen we de resterende producten naar u zodra we ze uit Shenzhen ontvangen.
3. Internationaal Magazijn
3.1 Duits Magazijn
3.2 Amerikaans magazijn
3.3 Chinees magazijn
4. Douane en belastingen
4.1 Hoe worden douanezaken afgehandeld door OpenELAB voor import of export?
4.2 Hoe wordt btw in rekening gebracht wanneer de klant een bestelling plaatst bij OpenELAB?
4.3 Welke soort kosten worden in rekening gebracht behalve btw?
Ingangsdatum: 7 augustus 2025
Bij OpenELAB zetten we ons in voor het bieden van nauwkeurige productbeschrijvingen en het leveren van producten van hoge kwaliteit. Als u problemen ondervindt met uw aankoop, meld dit dan binnen 30 dagen na de verzenddatum.
1. Garantie-uitsluiting
Tenzij uitdrukkelijk vermeld in een specifieke overeenkomst of inkooporder, geeft OpenELAB geen garanties—uitdrukkelijk of impliciet—over de geschiktheid, bruikbaarheid of verkoopbaarheid van een product voor een bepaald doel of speciaal gebruik.
2. Garantiebeleid
Garantietermijn
De standaardgarantieperiode voor producten die door OpenELAB worden verkocht is 12 maanden vanaf de leveringsdatum.
Onder deze garantie zal OpenELAB redelijke inspanningen leveren om producten gratis te repareren of te vervangen als defecten te wijten zijn aan problemen met grondstoffen, ontwerp of fabricage.
Als het defect onder dit beleid valt maar buiten de gedekte reikwijdte valt, kunnen redelijke kosten in rekening worden gebracht voor reparatie of vervanging.
Na de garantieperiode kan ondersteuning nog steeds beschikbaar zijn tegen een redelijke vergoeding.
Garantie-uitsluitingen
De garantie is niet van toepassing in de volgende gevallen:
- Het product valt buiten de garantieperiode van 12 maanden.
- Schade door verkeerd gebruik, onjuiste onderhoud of opslag, of het niet volgen van de gebruikershandleiding of handleiding.
- Problemen veroorzaakt door Overmacht (bijv. natuurrampen, oorlog, wetswijzigingen, enz.).
- Ongeautoriseerde reparatiepogingen door de klant.
- Het product is niet defect maar is geopend en kan volgens het beleid niet worden geretourneerd.
3. Retouren & Terugbetalingen
Als u niet tevreden bent met uw aankoop, komt u mogelijk in aanmerking voor een retour of ruil:
- Retour voor terugbetaling: Binnen 15 dagen na ontvangst (ongeopend).
- Retour voor vervanging: Binnen 30 dagen na ontvangst (beschadigd of defect).
- Ruiltermijn: Tot 30 dagen na ontvangst.
Stuur ons een e-mail op info@openelab.io voor een retourautorisatie voordat u iets terugstuurt.
Retourvoorwaarden
- Artikelen moeten in originele, schone en perfecte staat zijn met onbeschadigde verpakking.
- Retourzendingen van beschadigde, gebruikte, gekraste, gewijzigde of geprogrammeerde artikelen worden niet geaccepteerd.
- Voeg het ontvangstbewijs toe, een korte notitie met uw naam, bestelnummer en reden van retour.
Verzending & Kosten
- Klanten zijn verantwoordelijk voor de retourverzending naar onze magazijnen in Europa, de VS of China.
- Als een retour wordt aangevraagd vanwege klantredenen (bijv. van gedachten veranderd, verkeerde bestelling, enz.), worden zowel de oorspronkelijke verzendkosten als de retourverzendkosten afgetrokken van het terugbetalingsbedrag.
- Voor retourzendingen vanwege klantredenen zullen wij een retourverzendlabel aanmaken en verstrekken.
Betalingsplatformkosten
Voor alle terugbetalingen die worden aangevraagd vanwege klantredenen, wordt een standaard servicekostenbedrag afgetrokken van het terugbetalingsbedrag, dat in rekening wordt gebracht door de betalingsplatforms. De specifieke kosten zijn als volgt:
Shopify Payments: 1,8% + €0,3
PayPal: 4,4%
