


























































































If the page is blank, it means there are no articles under these tags. Please select other tags.
Prodotti
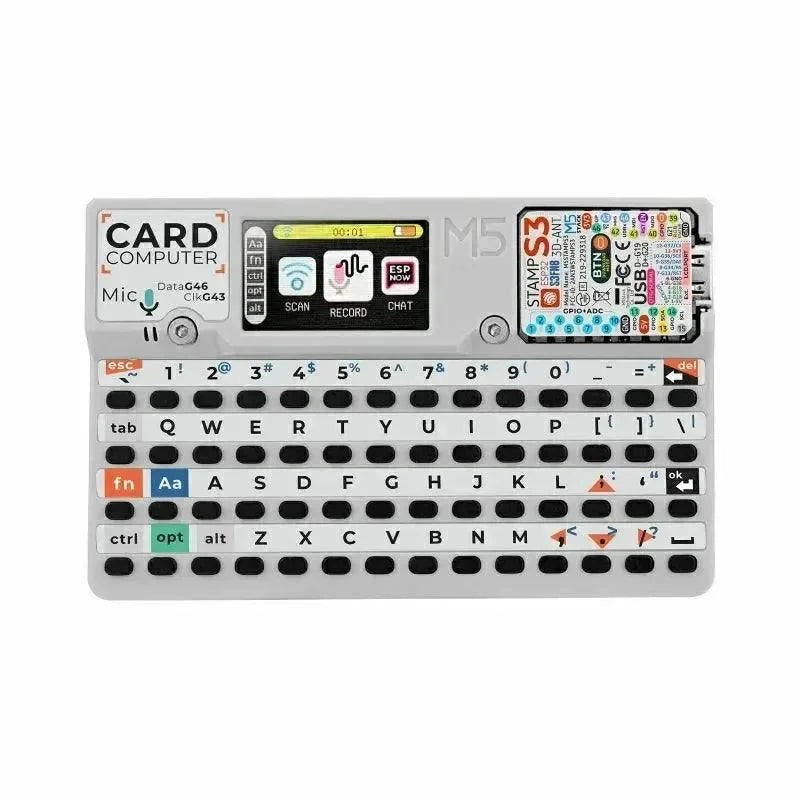
 Consiglio di sviluppo
Consiglio di sviluppo
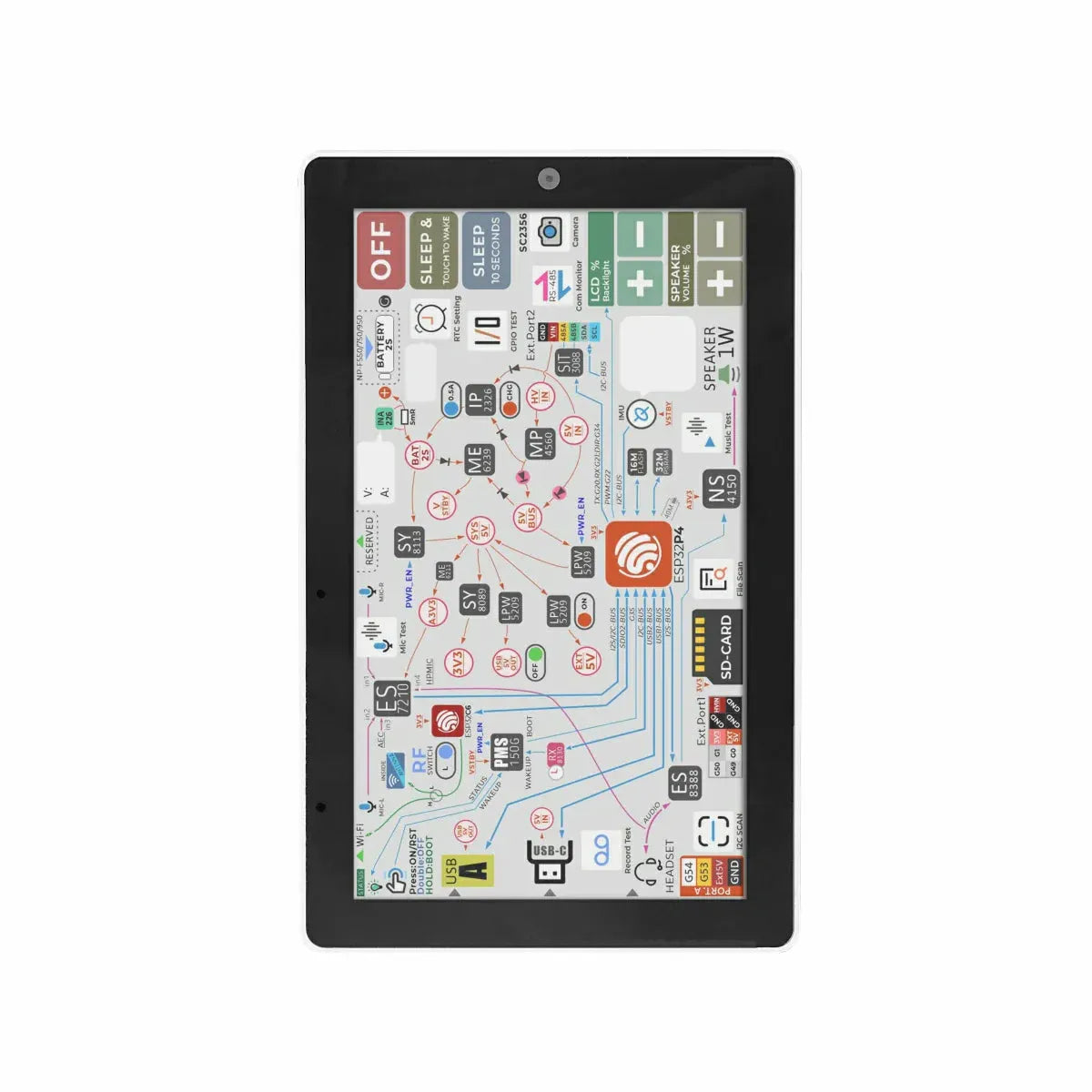
 Schermo
Schermo
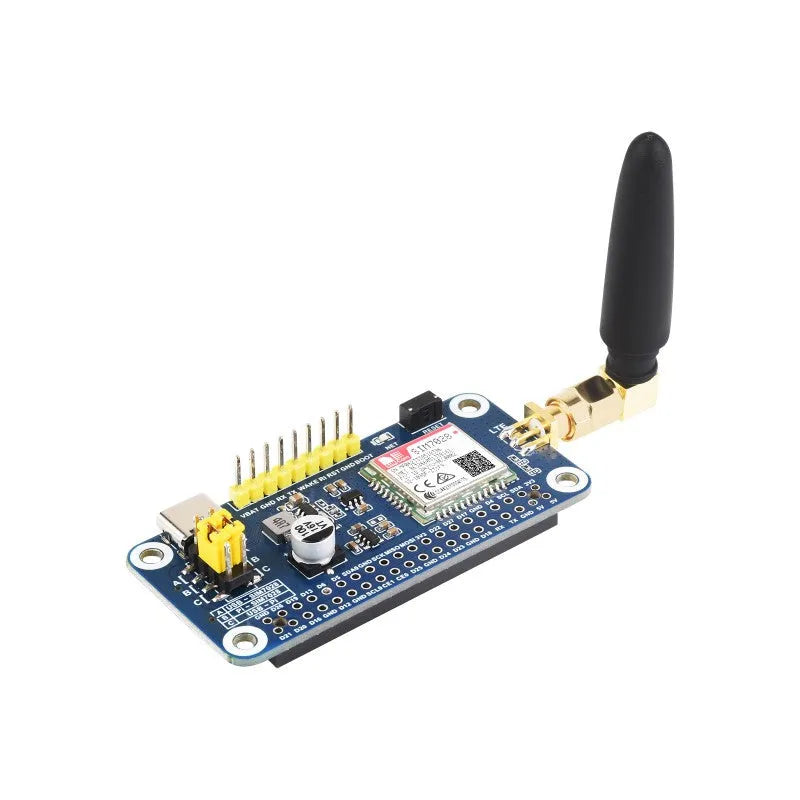
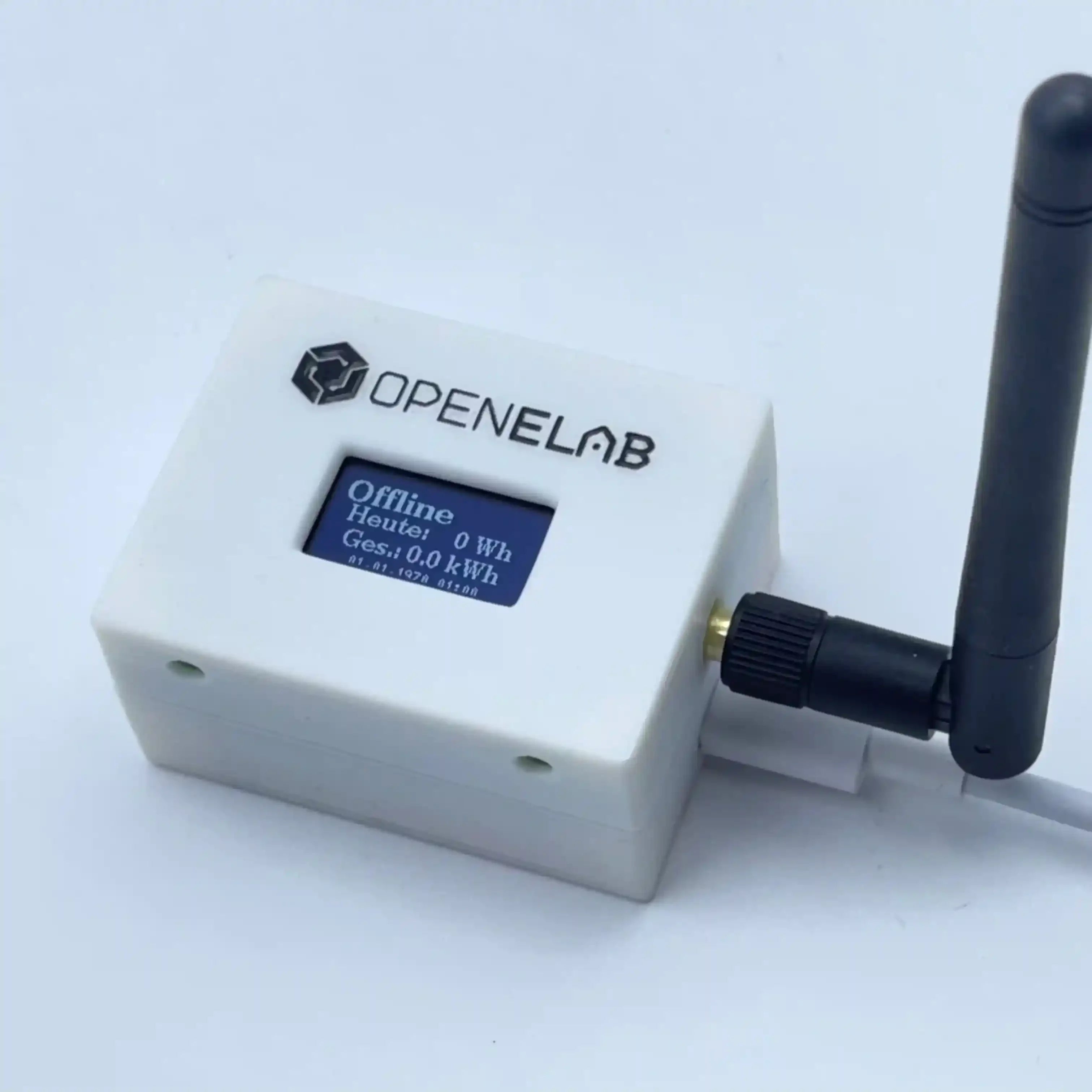
 Wireless e IoT
Wireless e IoT
 Telecamera
Telecamera
-
 Fotocamera AI Edge
Fotocamera AI Edge
-
 Fotocamera generale
Fotocamera generale
-
-
 Profondità e Telecamera LiDAR
Profondità e Telecamera LiDAR
-
 Accessorio per fotocamera
Accessorio per fotocamera
-
 Energia
Energia
-
 GUIDATO
GUIDATO
-
 Tipo strano
Tipo strano
Hai bisogno di aiuto? Indirizzo: Zeppelinstraße 33,
85748 Garching bei MünchenEmail: info@openelab.ioCellulare: +49 1626571232
