






























































































Waveshare 5+1 DOF High-Torque Serial Bus Servo Robotic Arm Kit
📦 Location of the warehouse: China
Kostenloser Versand ab 30€ in Deutschland, 50€ in der EU!
- Lieferzeit für EU- und US-Länder: 5~10 Werktage.
- Lieferzeit für andere Länder: 2~2,5 Wochen.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Garantierter sicherer Checkout
Waveshare 5+1 DOF High-Torque Serial Bus Servo Robotic Arm Kit
The RoArm-M3 is a 5 + 1 DOF high-torque serial bus servo robotic arm kit, based on ESP32. It features a 2-DOF wrist joint, supports flexible expansion and secondary development, wireless control, and is compatible with LeRobot for advanced AI applications.

Product Introduction
The RoArm-M3 series is a 5 + 1 DOF smart robotic arm designed for innovative applications. It features a lightweight structure with an effective payload of 0.2kg@0.5m, allowing flexible mounting on various mobile platforms. A 360° omnidirectional base combined with five flexible joints creates a workspace with a 1-meter diameter.
Its joint direct-drive design enhances repositioning precision and structural reliability, with innovative dual-drive technology doubling the shoulder joint torque. The onboard ESP32 MCU main control module supports multiple wireless control modes, providing extensive control interfaces and communication protocols for easy device connectivity.
A user-friendly, cross-platform WEB application offers a simple, visualized coordinate control mode for easy onboarding. Comprehensive graphic and video tutorials are provided for quick learning. Compatible with ROS2 and various host computers, it supports multiple wireless and wired communication modes. Expansion plates allow for customizing the EoAT (End of Arm Tooling) to meet diverse application requirements.
The RoArm-M3 series also supports the popular AI robotic arm project LeRobot, integrating its pretrained models, datasets with demonstrations, and simulation environments. This provides strong support for research in Deep Learning, Imitation Learning, and Reinforcement Learning. Developers can quickly deploy intelligent algorithms onto the RoArm-M3 using LeRobot's demos and algorithm libraries, expanding possibilities for innovative applications.
The RoArm-M3 series achieves an excellent balance between lightweight design, user-friendliness, expandability, and open innovation. It is a multi-functional robotic arm ideal for applications requiring flexibility, expandability, and ease of use, integrating intelligent control, human-machine interaction, and customizable development.
Version Options
Choose between the RoArm-M3-S and RoArm-M3-Pro. The RoArm-M3-Pro features 5 all-metal ST3235 bus servos, offering enhanced durability and stable backlash that does not increase with use.

Parameter Comparison
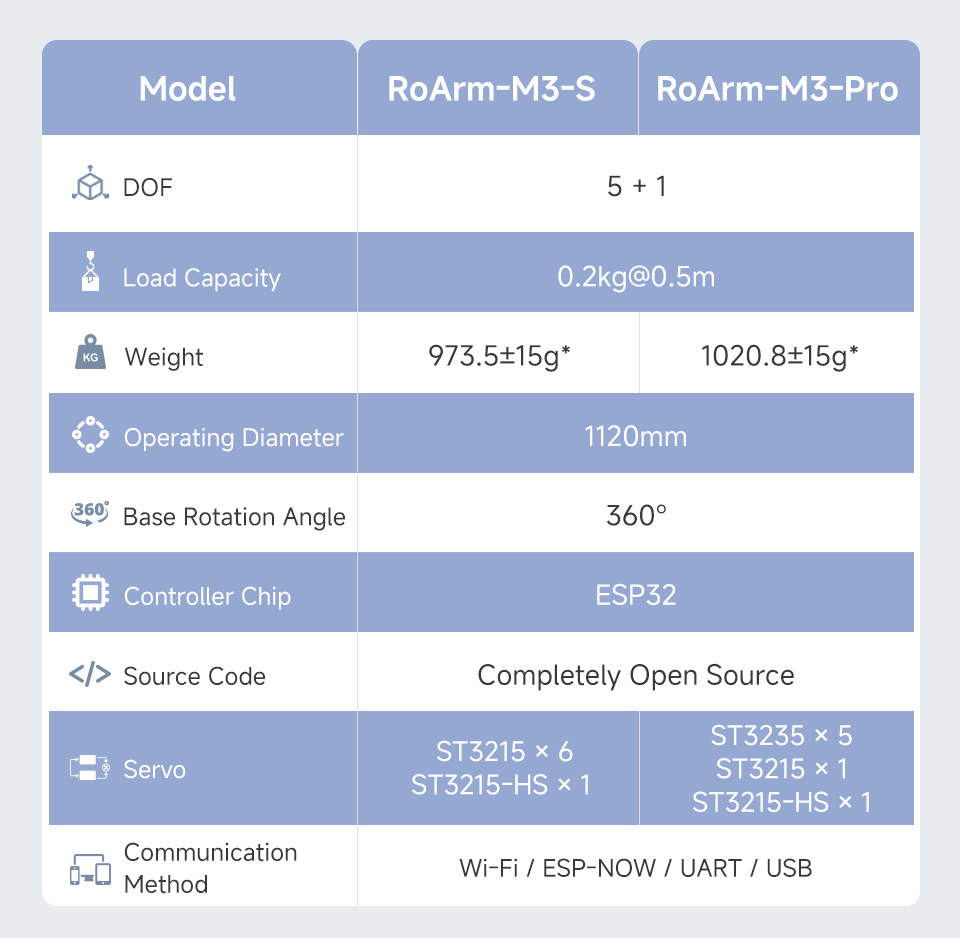
* Not including the weight of the table edge fixing clamp (290±10g).
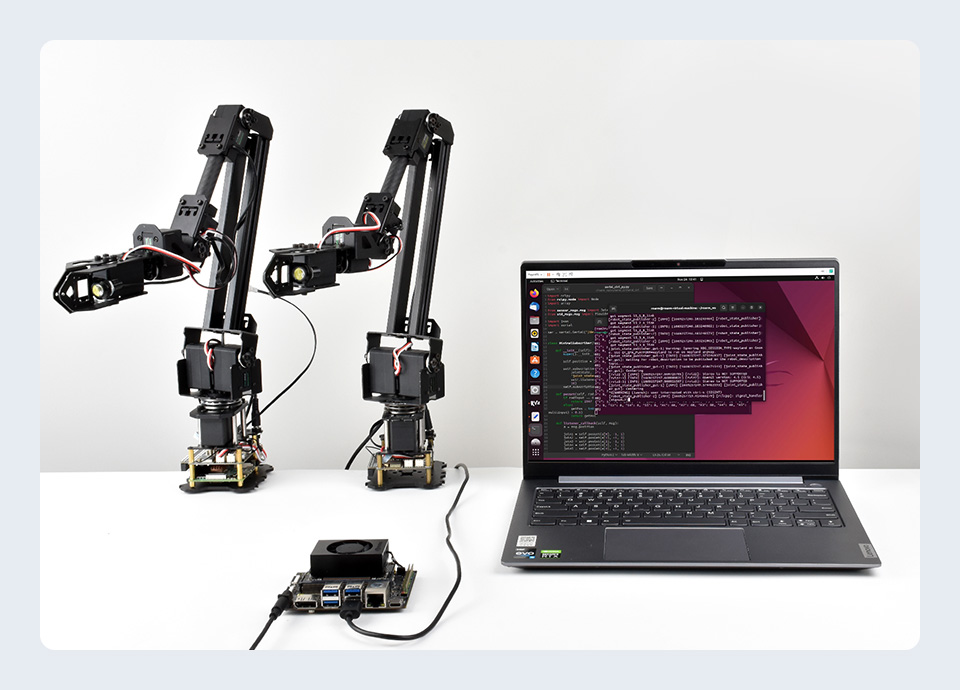
Compatible with the popular AI robotic arm project - LeRobot
The RoArm-M3 robotic arm series seamlessly integrates with the open-source LeRobot framework on Hugging Face. This provides core resources including pretrained models, datasets from human demonstrations, and simulation environments. When paired with an N-VIDIA Jetson Orin NX motherboard or a PC with an N-VIDIA discrete GPU, users can experience the complete process of Imitation Learning and Reinforcement Learning projects.
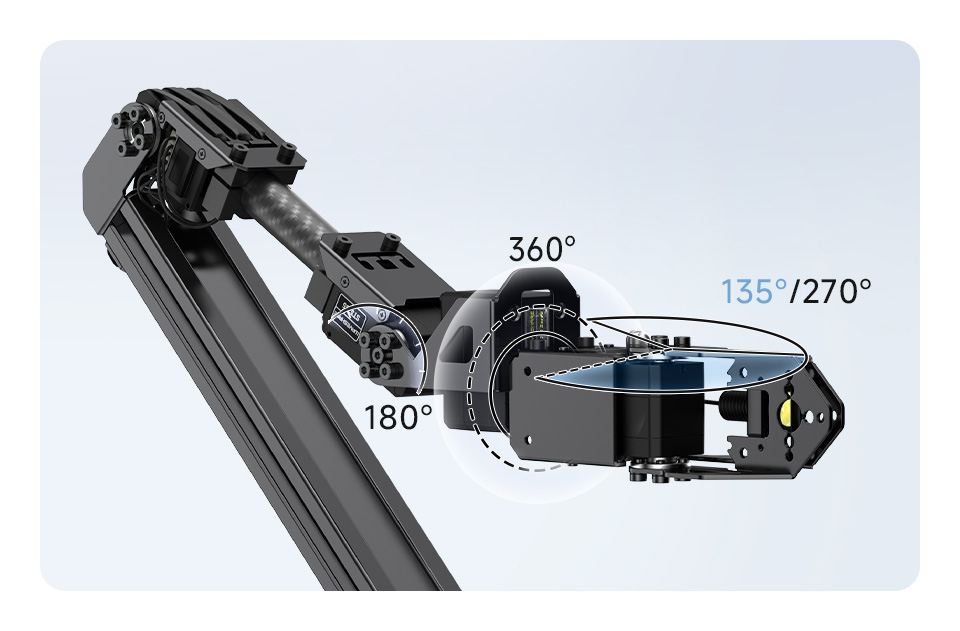
Flexible Joints & Omnidirectional Space
Featuring a 360° rotation base and flexible joints, the RoArm-M3 creates an omnidirectional operating space with a 1-meter diameter, enabling free movement in all directions.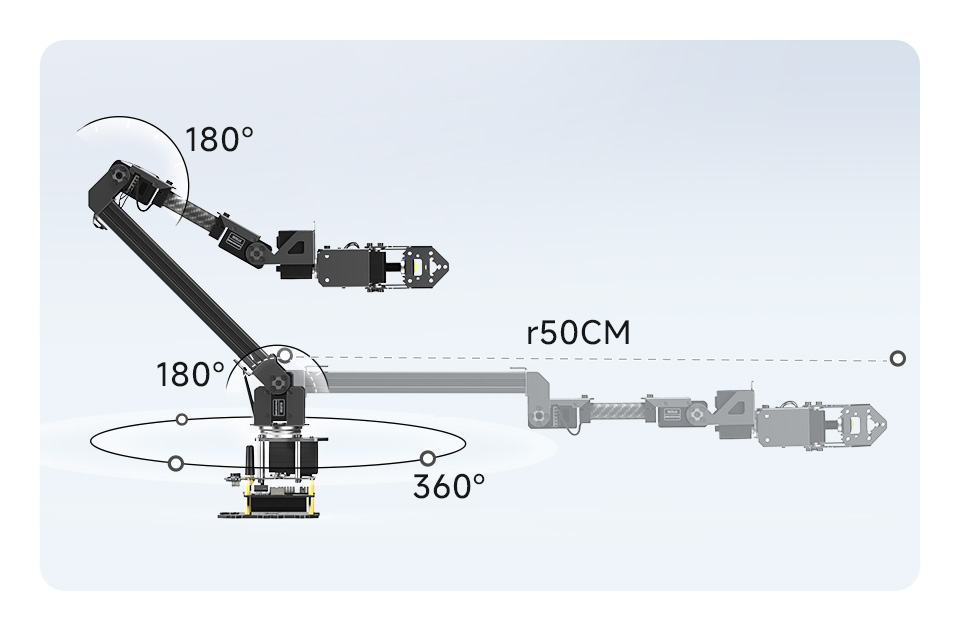
2 DOF Wrist Joint + EoAT for More Flexible Clamping
Equipped with a 2-DOF wrist joint offering pitch and horizontal rotation support, this robotic arm ensures seamless coordination with the End of Arm Tooling (EoAT) for multi-dimensional clamping and operation.
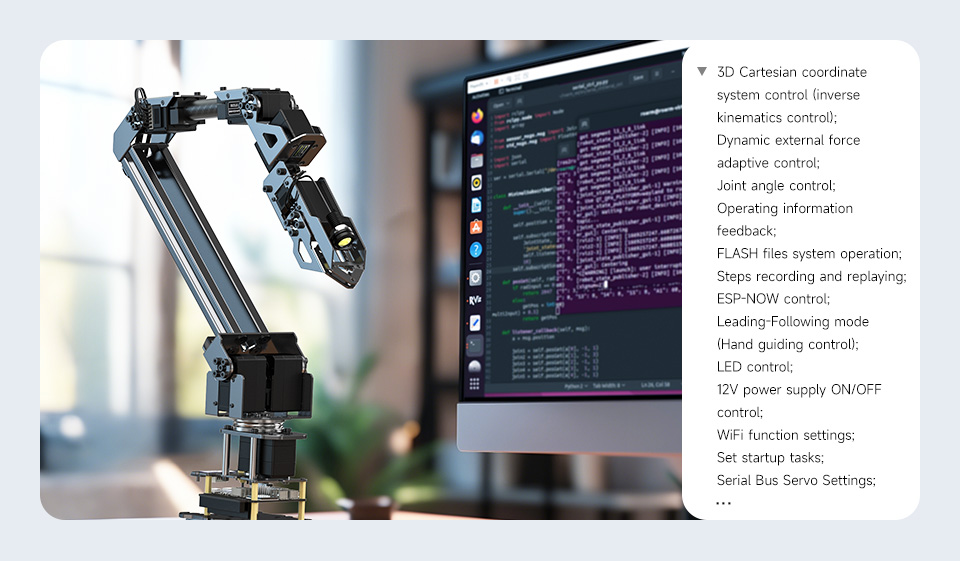
Easy to Control via Cross-platform Web Application
No app installation is required. Access and control the RoArm-M3 via a simple web application on mobile phones, tablets, or computers. This open-source Web App also supports secondary development for custom user interfaces and new functions.

Completely Open Source for Secondary Development
The control codes and communication interface documents for the RoArm-M3 series are fully open source, supporting secondary development across multiple languages and devices. Modularized demos and tutorials are provided to help beginners get started easily.
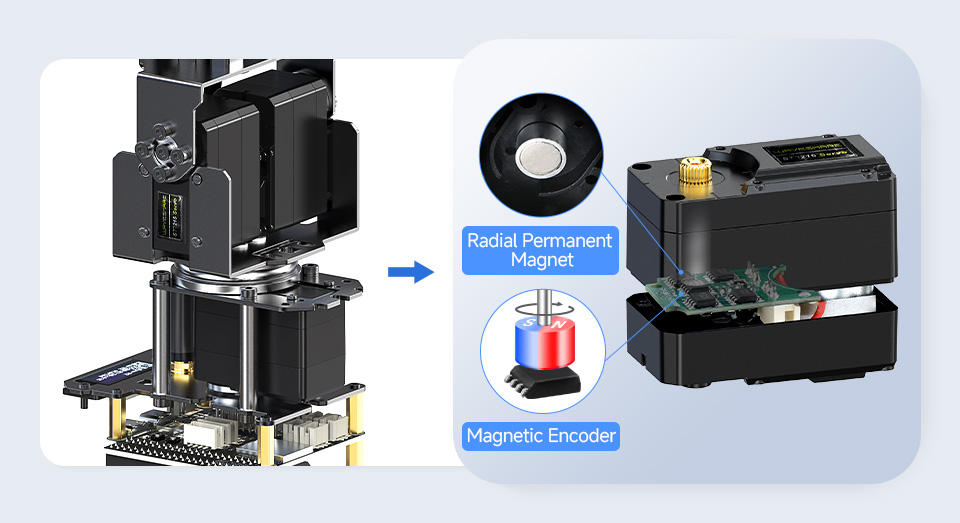
Joint Direct-Drive Design: Feedback Precision up to 0.088°
Achieve highly accurate joint angle feedback directly via a 12-bit high-precision magnetic encoder, without reduction groups. This allows for precise calculation of the actual position of the current target point based on feedback.
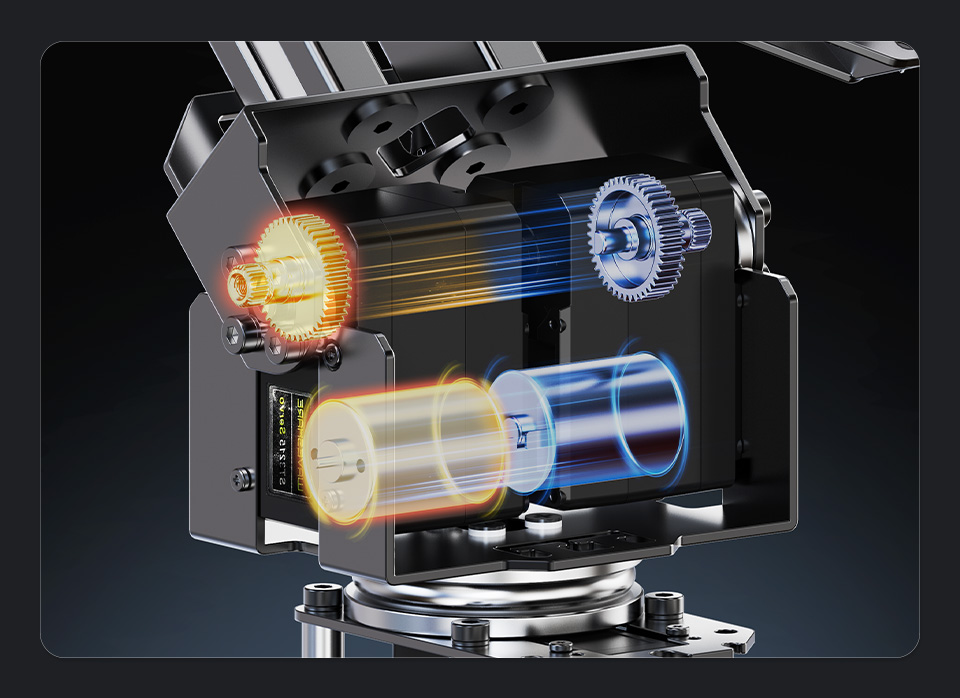
Innovative Dual-Drive Technology Doubles Shoulder Joint Torque
A specially developed dual-drive control algorithm enables two servos at the shoulder joint to coordinate their output torque effectively, significantly enhancing the power and overall load capacity of the RoArm-M3 Series.
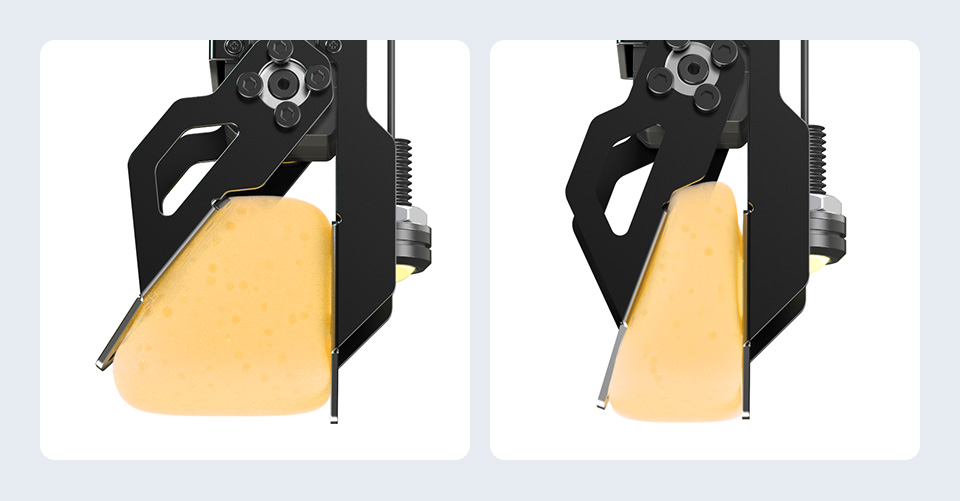
Direct-Drive Clamp Enables Precise Force Control
The direct-drive clamp design allows precise programmatic control of clamping force, making it ideal for handling delicate objects without excessive pressure.
Dynamic External Force Adaptive Control
Enable this function to limit the maximum torque for each joint. If external force exceeds the configurable torque threshold, the robotic arm will rotate in response, returning to its specified position when the force decreases.

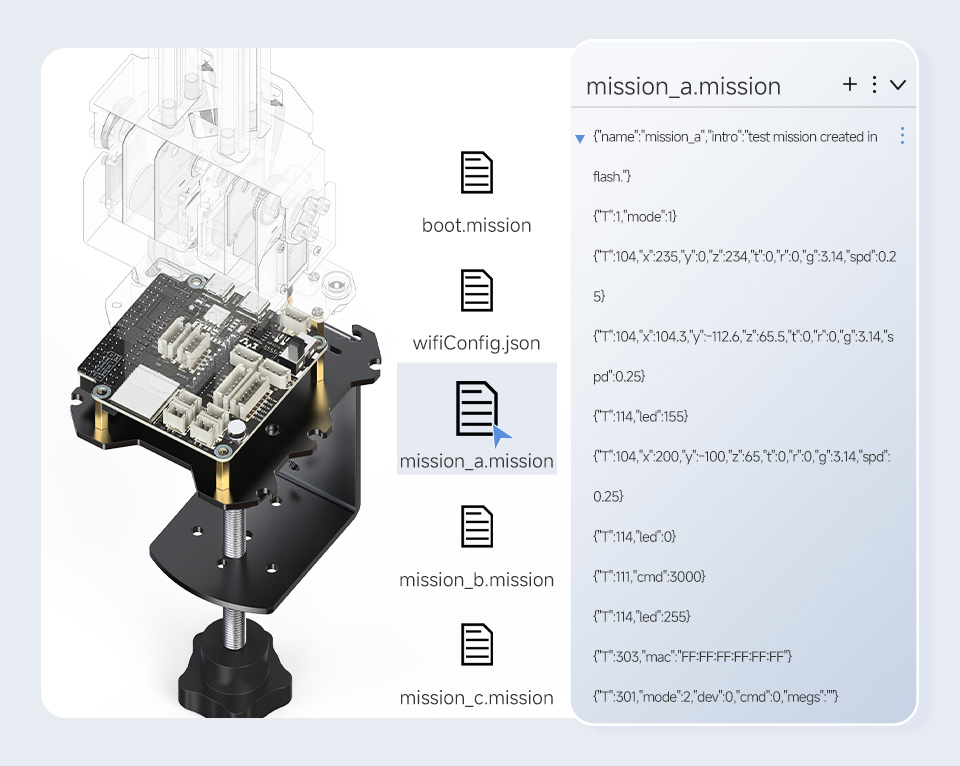
One-Click Automatic Recording: Easy to Create Actions
The RoArm-M3 can save JSON instructions for robot control as task files directly to the ESP32's Flash memory, ensuring data retention even without power. These task files allow the robotic arm to perform complex and repetitive operations.
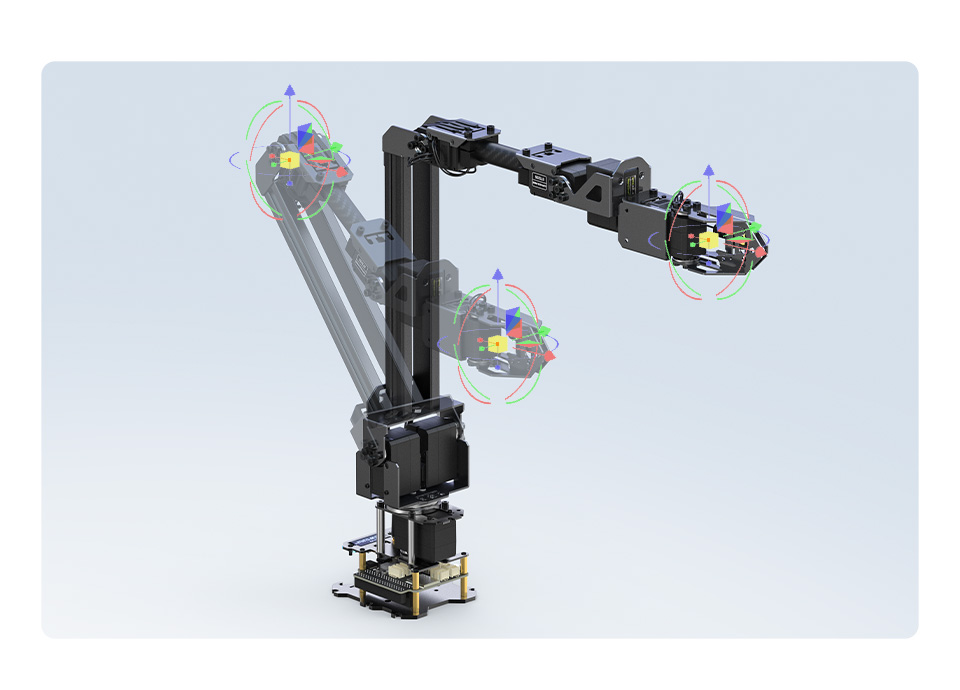
Accurately Reach the Target by Entering Coordinates
Utilize the open-source inverse kinematics control algorithm in the three-dimensional Cartesian coordinate system. By inputting the target position, the robot arm accurately reaches the point by calculating each joint's rotation angle.
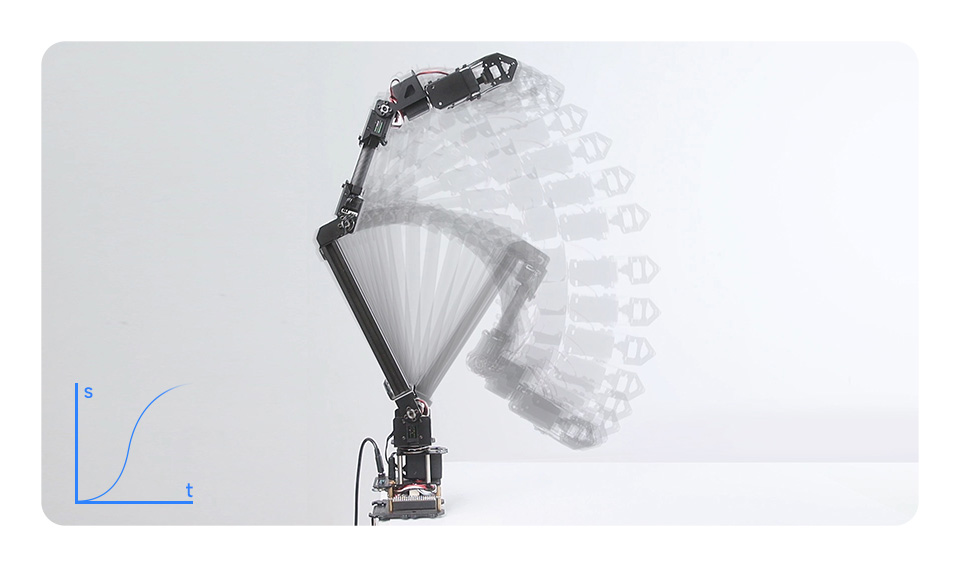
Curve Velocity Control for Smoother Movement
The curve velocity control algorithm ensures smoother and more natural robotic arm movement, eliminating oscillations during start and stop phases.
ESP-NOW Wireless Control: Low-Delay Remote Collaboration
ESP-NOW is a low-delay ad hoc wireless communication protocol that operates without network infrastructure. Control multiple robotic arms wirelessly with broadcast, group, or one-to-one control methods.
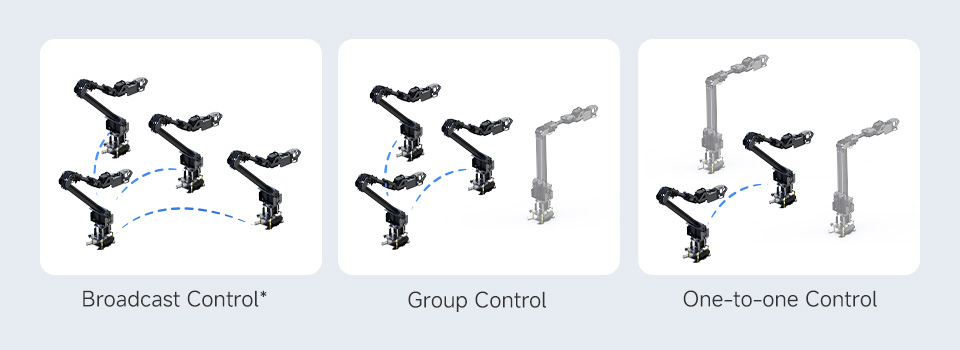
* Note: Broadcast control has no device limitations, while group control supports up to 20 devices. Refer to the WIKI for details.
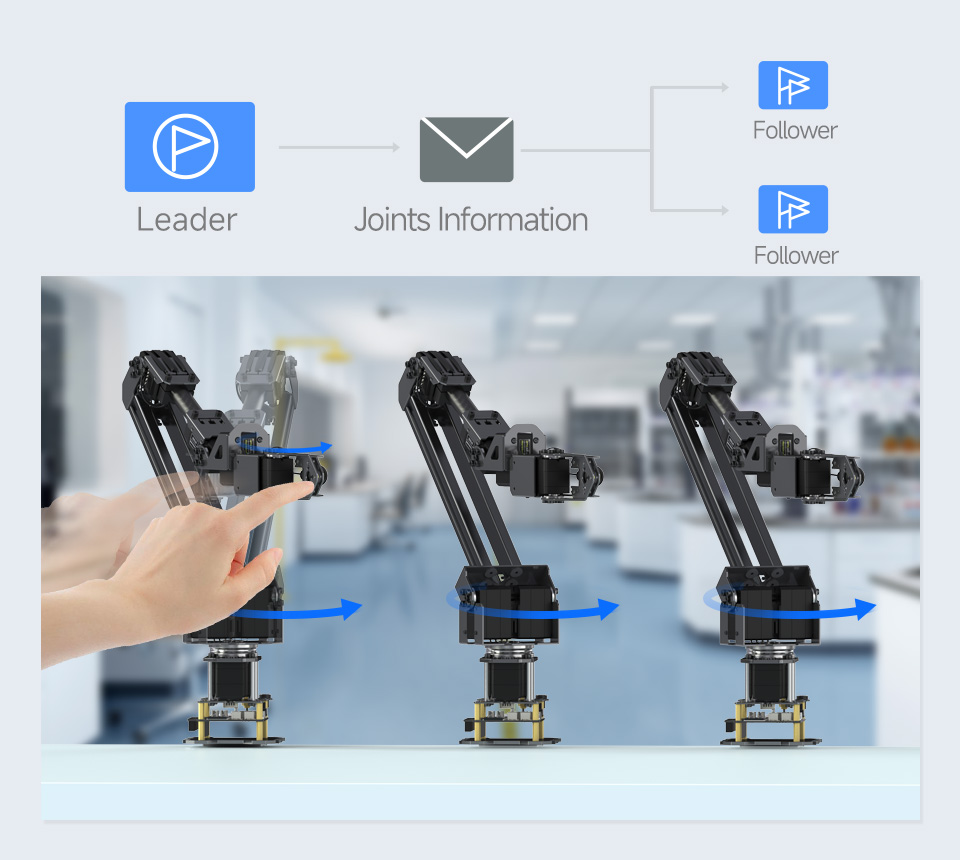
Supports Leading-Following Control Mode Based on ESP-NOW
In Leading-following control mode, the Leader robotic arm transmits its joint angle information via ESP-NOW. Follower robotic arms then precisely imitate these actions in real time.
Multiple Control Interfaces, Multi-Device and Language Support
Beyond the WEB application, the RoArm-M3 series can be controlled via HTTP protocol network requests, serial communication, or USB communication, sending JSON commands and receiving feedback from various controllers.
Multiple Installation Methods for Integrating into Your Application
Various installation schemes and secondary development resources are provided, allowing flexible integration into diverse projects and applications.

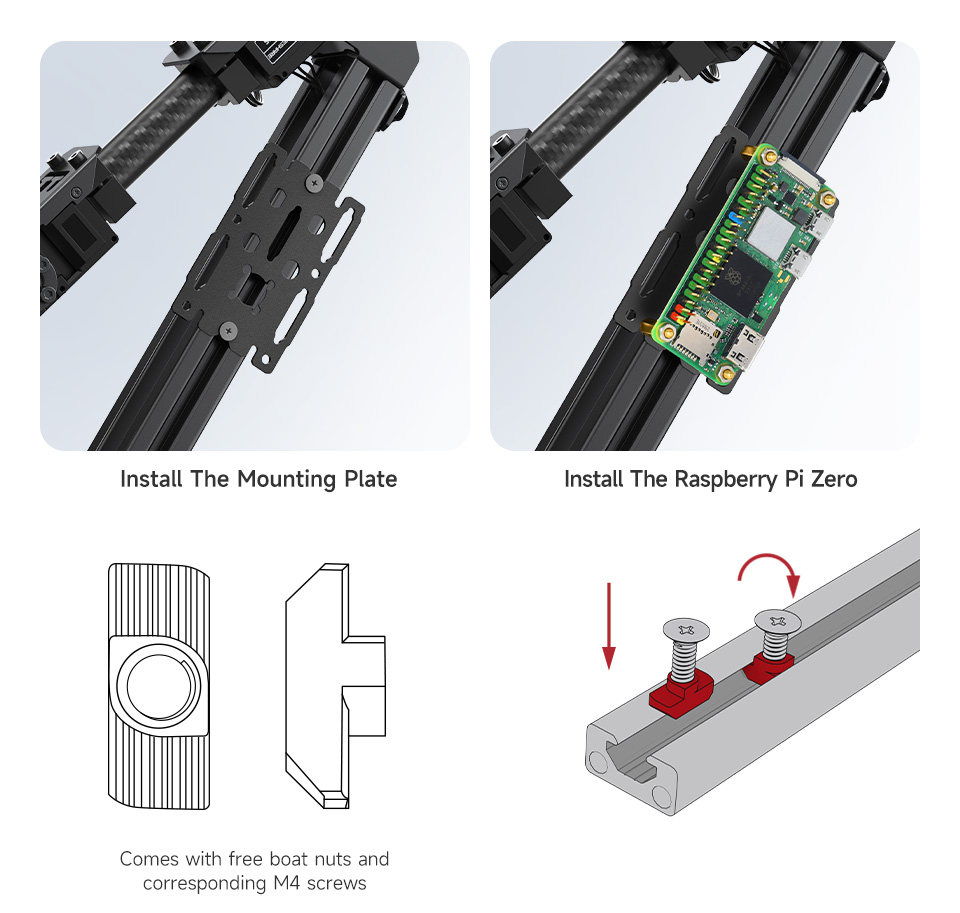
Easy to Install Different Peripherals
The upper arm's main structure features two 1020 European standard aluminum rails, enabling easy installation of additional peripherals with boat nuts and M4 screws to meet specific needs.
Supports Installing a Camera to Extend Visual Applications
Includes a camera holder and open-source drawings. Directly install a compatible camera or adapt others for advanced visual applications.
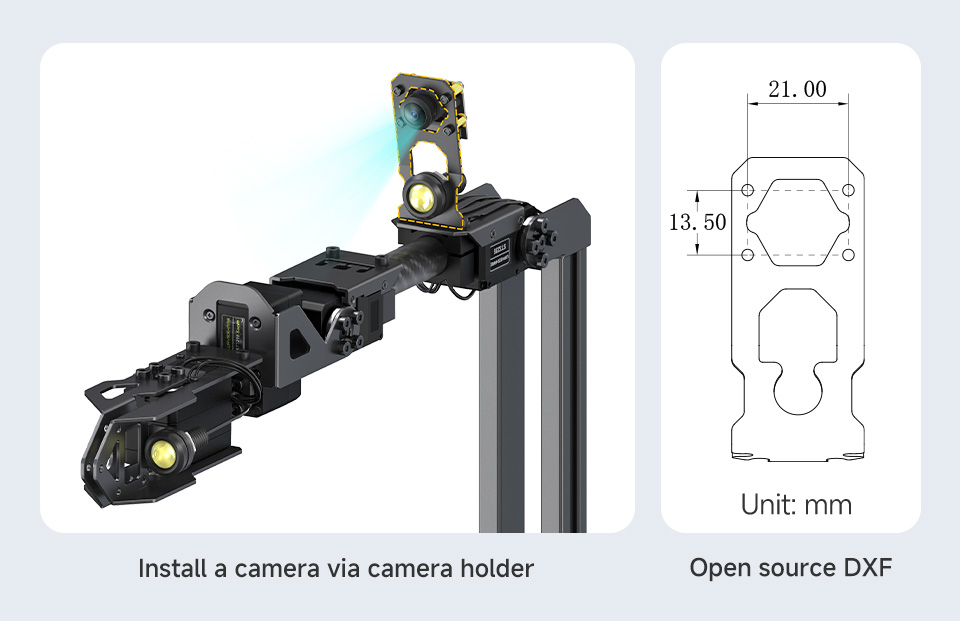
* for reference only, only the LED light is included.
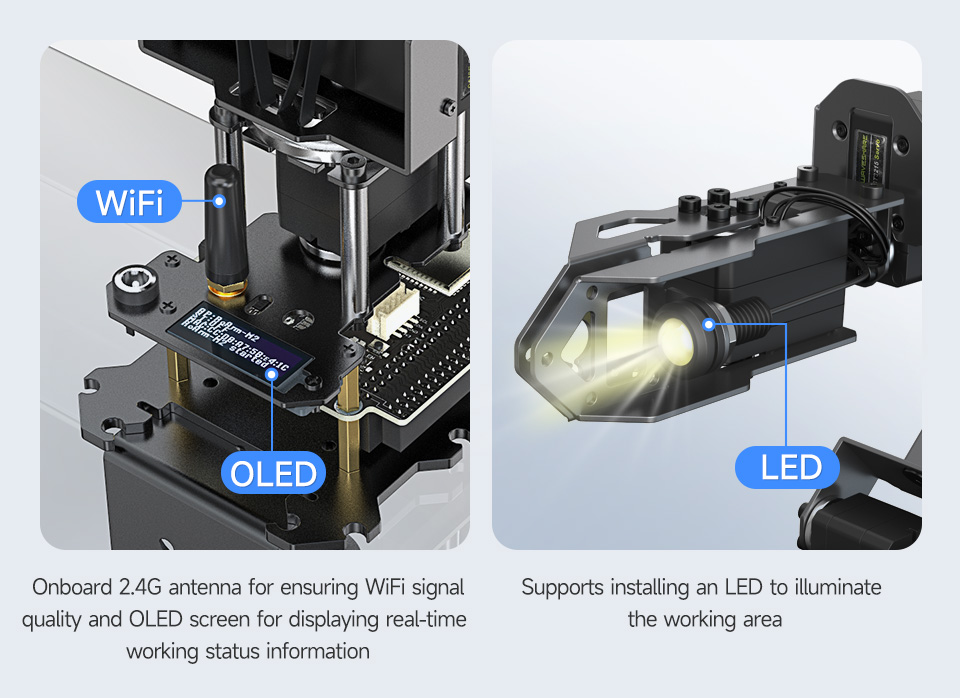
Onboard ESP32 Main Control Board
Features a powerful ESP32 main control MCU supporting multiple wireless communication protocols, with abundant open-source resources to facilitate secondary development of innovative applications.
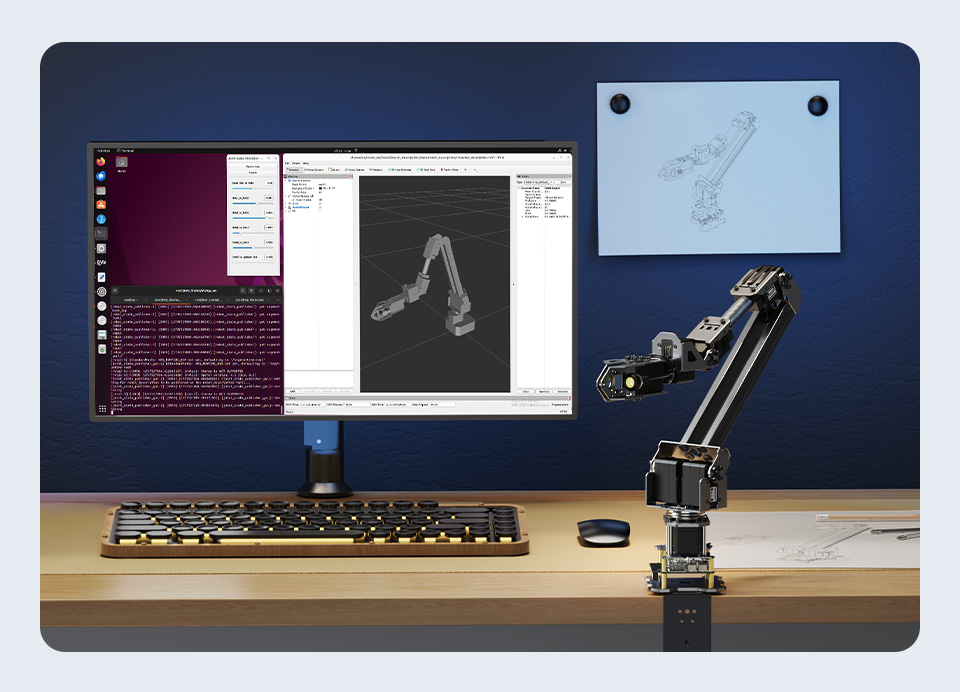
Compatible with ROS2: Provides Model Establishment File and Supports Multi-Device Cooperation
Offers ROS2 communication nodes, a URDF model description file, and a beginner-friendly ROS2 tutorial.
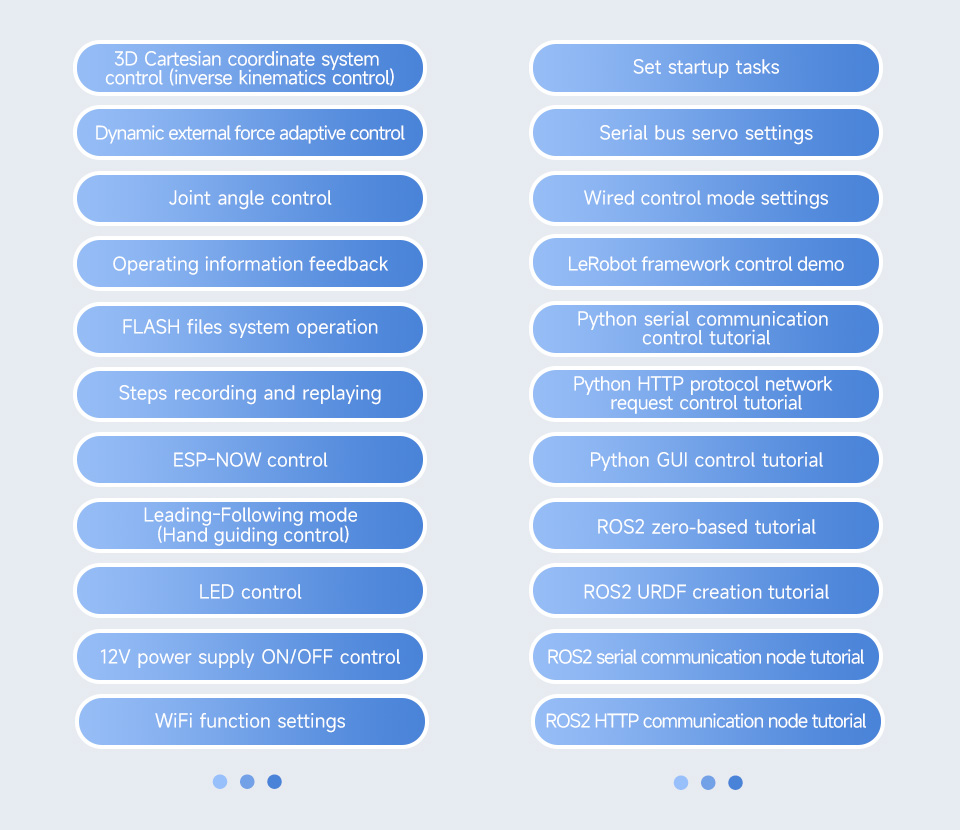
Rich Tutorial Resources for Secondary Development
Comprehensive unit tutorials and cases covering various functions and common application scenarios are provided to help users quickly master secondary development.
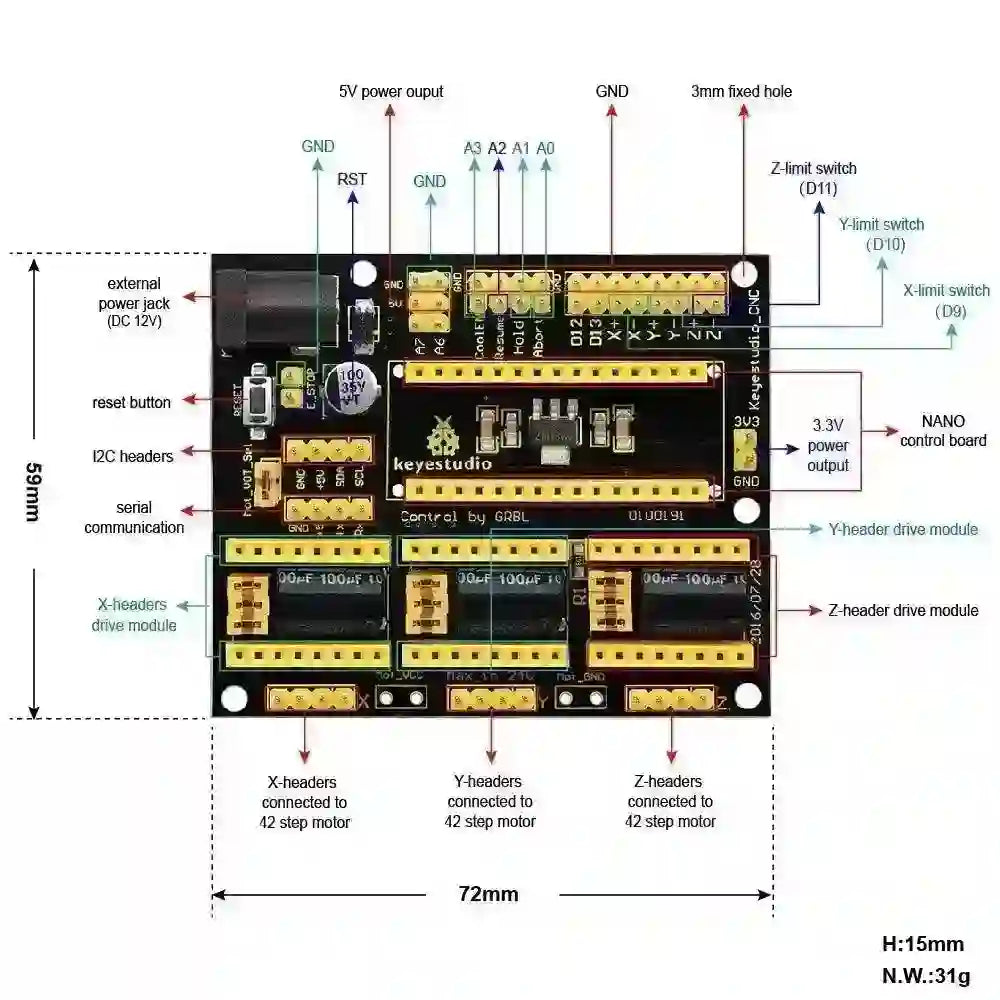
General Driver Board for Robots
The onboard driver board features rich interfaces and resources for innovative development and functional expansion.
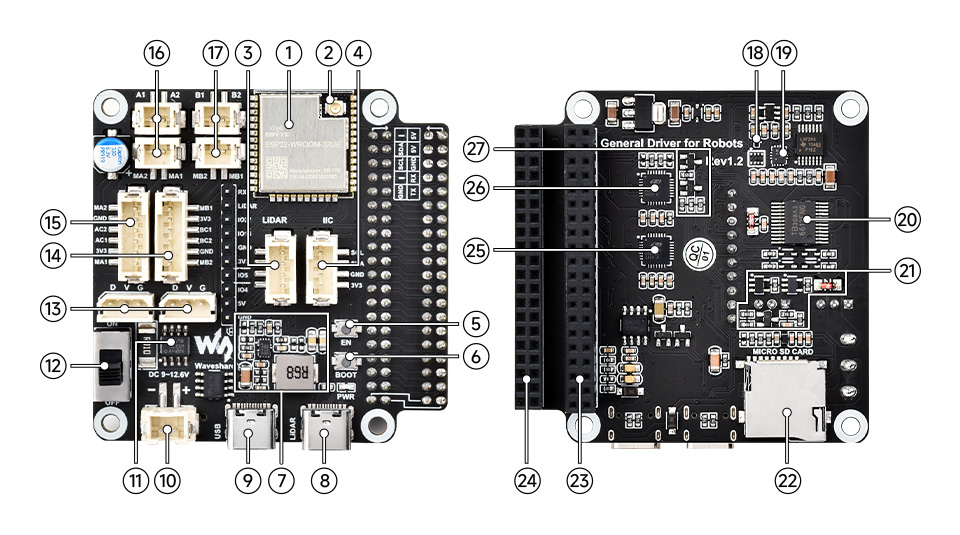
- ESP32-WROOM-32 controller module: Can be developed using Arduino IDE.
- IPEX 1 WIFI connector: For connecting WIFI antenna to increase wireless communication distance.
- LIDAR interface: Integrated LIDAR adapter function.
- I2C peripheral expansion interface: For connecting with OLED screen or other I2C sensors.
- Reset Button: Press and release to reboot the ESP32.
- Download button: Press when powering on to enter download mode.
- DC-DC 5V voltage regulator circuit: Provides power supply for host computers such as Raspberry Pi or Jetson Nano.
- Type-C port (LADAR): LIDAR data transmission.
- Type-C port (USB): ESP32 communication interface, for uploading programs to ESP32.
- XH2.54 power port: Supports DC 7~13V input, can directly power the serial bus servos and motors.
- INA219: Voltage/current monitoring chip.
- Power ON/OFF: External power supply ON/OFF.
- ST series serial bus servo interface: For connecting with ST3215 / ST3235 serial bus servo.
- Motor interface PH2.0 6P: Group B interface for motor with encoder.
- Motor interface PH2.0 6P: Group A interface for motor with encoder.
- Motor interface PH2.0 2P: Group A interface for motor without encoder.
- Motor interface PH2.0 2P: Group B interface for motor without encoder.
- AK09918C: 3-axis electronic compass.
- QMI8658C: 6-axis motion sensor.
- TB6612FNG: Motor Control Chip.
- Serial bus servo control circuit: For controlling multiple ST3215 serial bus servos and obtaining servos feedback.
- TF card slot: Can be used to store logs or WIFI configurations.
- 40PIN GPIO header: For connecting with Raspberry Pi or other host boards.
- 40PIN extended header: Easy to use the GPIO pins of Raspberry Pi or other host boards.
- CP-2102: UART to USB, for LIDAR data transmission.
- CP-2102: UART to USB, for ESP32 communication.
- Automatic download circuit: For uploading programs to the ESP32 without pressing the EN and BOOT buttons.
Diversified Onboard Resources Supports Function Expansion
Integrated with INA219 battery voltage monitoring and a 9-axis IMU sensor, enabling extensive function expansion and innovation.

Mouse Drag-and-Drop Interaction
Utilize Web applications and desktop software (open-source Python programs) to set action instructions with mouse presses and releases, providing flexible control over the robotic arm.

Specifications
| Feature | Detail |
|---|---|
| DOF | 5 + 1 |
| Work space | Horizontal diameter: 1120mm (Max, 360° omnidirectional), Vertical: 798mm (Max) |
| Operating voltage | 12V 5A power supply, supports 3S Lithium batteries (NOT included) |
| Load capacity | 0.2kg@0.5m |
| Repositioning precision | ~ 5mm |
| Servo rotation speed | 40rpm (no-load, no torque limit) |
| Operating range | BASE-360°, SHOULDER-180°, ELBOW-225°, HAND-135°/270° |
| Drive type | TTL Serial bus servo, direct-drive joint |
| Servo numbers | 7 |
| Joint angle sensor | 12-bit 360° magnetic encoder |
| Servo torque | 30KG.CM @12V, 20KG·CM @ 12V (EoAT) |
| Joint feedback information | servo status, joint angle, rotation speed, joint load, servo voltage, servo current, servo temperature and servo working mode |
| Main control | ESP32-WROOM-32 |
| Main control module features | WiFi, BT, Dual Core, 240MHz |
| Wireless control mode | 2.4G-WiFi, ESP-NOW |
| Wired control mode | USB, UART |
| Manual operation mode | WEB control interface |
| Host operation mode | UART / USB / WEB commands in JSON data format |
| Host support | USB connection devices such as Raspberry Pi, Jetson Orin Nano, and PC. |
| EoAT function | clamp function by default, can be changed as an additional degree of freedom |
| LED power | ≤1.5W |
| OLED screen size | 0.91inch |
| Other functions | 2-ch 12V power supply switch, 9-DOF IMU |
| Robotic arm weight | RoArm-M3-S: 973.5±15g RoArm-M3-Pro: 1020.8g±15g (Not including the weight of the table edge fixing clamp) |
| Table edge fixing clamp weight | 290±10g |
| Supported table edge thickness of the clamp | 72mm |
| Demo | 3D Cartesian coordinate system control (inverse kinematics control); Dynamic external force adaptive control; Joint angle control; Operating information feedback; FLASH files system operation; Steps recording and replaying; ESP-NOW control; Leading-Following mode (Hand guiding control); LED control; 12V power supply ON/OFF control; WiFi function settings; Set startup tasks; Serial bus servo settings; Feedback mode setting, etc. (Note: Please refer to the WIKI for more details) |
Product & Packaging Show

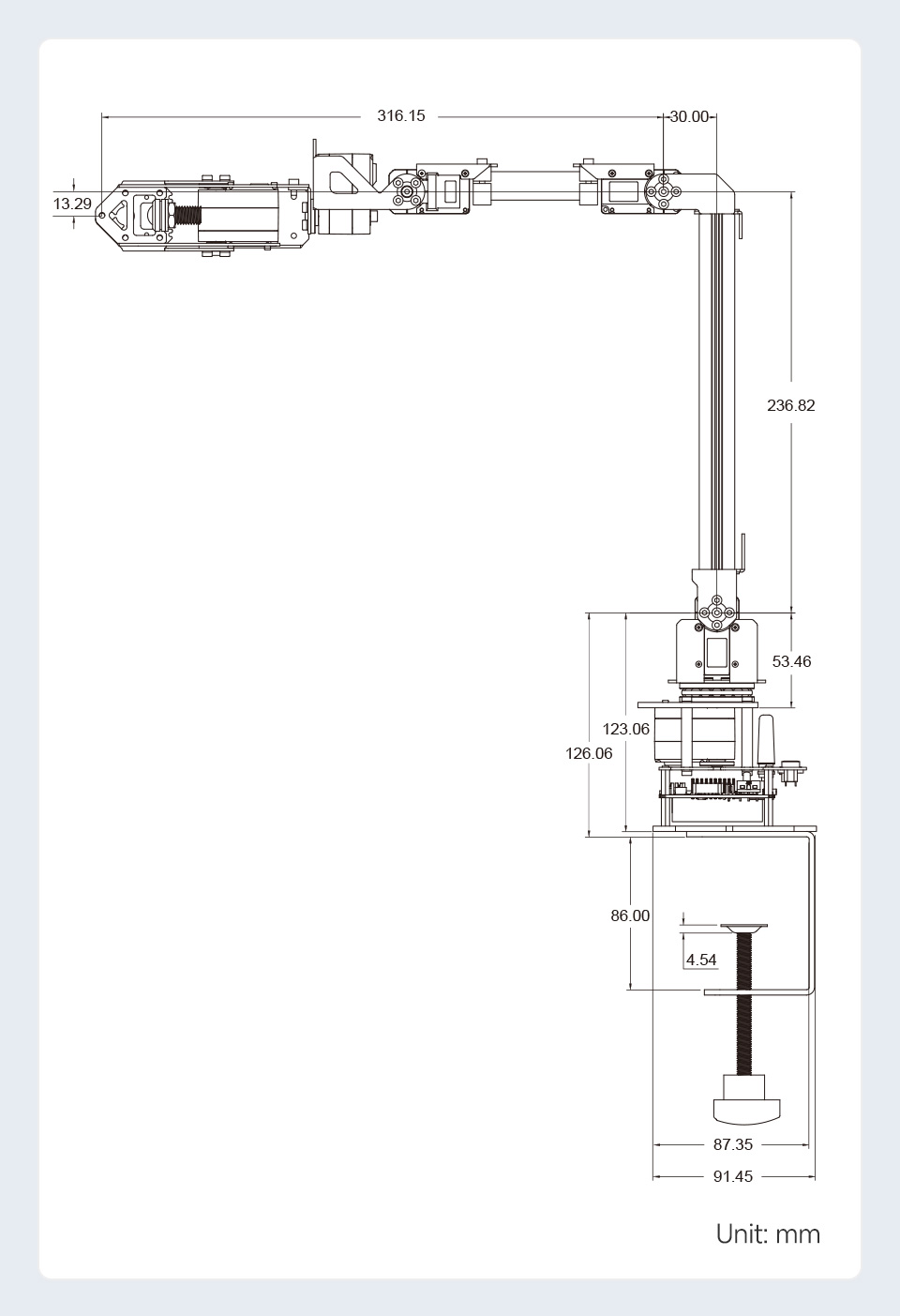
Dimensions
1. Allgemeine Versandinformationen
- Wir bieten Premium-Versandmethoden mit einer Sendungsverfolgungsnummer für jede Bestellung an.
-
Die Versandadresse sollte auf Englisch ohne Sonderzeichen eingegeben werden, damit das Kurierunternehmen Ihre Adresse im System erkennen kann. Wir versenden gemäß der von Ihnen angegebenen Versandadresse. Bitte informieren Sie uns über Adressänderungen, bevor Ihre Bestellung den Status "Versandt" erhält, um Paketverlust zu vermeiden.
-
Bitte kontaktieren Sie umgehend unseren Kundenservice, wenn Sie eine Bestellung stornieren oder ändern müssen. Sobald Ihre Bestellung den Status "Versandt" erreicht hat, kann sie nicht mehr storniert oder geändert werden. Um Komplikationen zu vermeiden, überprüfen Sie bitte Ihren Warenkorb vor dem Checkout erneut.
-
Wir können alle vorrätigen Bestellungen innerhalb eines Werktages versenden, sobald Ihre Bestellung bestätigt wurde.
-
Alle Artikel werden vor dem Versand geprüft und sorgfältig von Hand verpackt.
-
Bei Standard-Kurierdiensten müssen Sie den Inhalt des Pakets vor der Annahme prüfen. Andernfalls übernehmen wir keine Haftung für eventuelle Transportschäden.
2. Versandoptionen für Deutschland, EU*-Länder und USA
(Für Produkte im Lager München, Lager Long Beach)
2.1 Versandoptionen für einen Bestellwert bis zu 30 € innerhalb Deutschlands, 50 € innerhalb der EU* oder 45 € in den USA:
Versandoptionen:
| Versandoptionen | Deutschland | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Ankunft in 3-4 Werktagen |
€6 Ankunft in 5-9 Werktagen |
|
DHL Paket |
€6 Ankunft in 2-3 Werktagen |
€15 Ankunft in 3-7 Werktagen |
|
DHL Express |
€14 Ankunft in 1-2 Werktagen |
€65 Ankunft in 2-3 Werktagen |
| Versandoptionen | Kontinentale USA | Nicht-kontinentale USA |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Ankunft in 3-7 Werktagen |
€6.95 Ankunft in 5-9 Werktagen |
|
UPS Express |
€11.95 Ankunft in 2-4 Werktagen |
€13.95 Ankunft in 3-7 Werktagen |
2.2 Kostenlose Versandoptionen für einen Bestellwert über 30 € innerhalb Deutschlands, 50 € innerhalb der EU* oder 45 € in den USA:
| Kostenlose Versandoptionen | Deutschland | EU* |
|---|---|---|
|
Deutsche Post |
Kostenlos ab €30 | Kostenlos ab €50 |
|
DHL Paket |
+ €2 für über €30 / Kostenlos ab €60 | + €8 für über €50 / Kostenlos ab €80 |
|
DHL Express |
+ €10 für über €30 | + €60 für über €50 |
| Kostenlose Versandoptionen | Kontinentale USA | Nicht-kontinentale USA |
|---|---|---|
|
USPS Ground Advantage |
Kostenlos ab 45 € | Kostenlos ab 60 € |
|
UPS Express |
+ 8,95 € für über 45 € | + 11,95 € für über 45 € |
-
Bestimmte EU-Länder sind nicht in unserer EU-Zonendefinition enthalten: Vereinigtes Königreich (ohne Irland), Schweiz, Liechtenstein, Vatikanstadt, Albanien, Belarus, Norwegen, Ukraine und Island. Für die oben genannten Länder gilt die Internationale Versandregel.
- Die Regionen in den Nicht-kontinentale USA beinhalten: Alaska, Amerikanisch-Samoa, Guam, Hawaii, der Marshallinseln, der Nördliche Marianen, Palau, Puerto Rico, der US-Jungferninseln, der Streitkräfte Amerikas, der Streitkräfte in Europa, der Streitkräfte im Pazifik, und das US-Außengebiete. Der Versand und die Lieferung in diese Gebiete unterliegen den Versandregeln für nicht-kontinentale USA.
2.3 Versandoptionen für internationale Länder:
(über Deutsche Post oder YunExpress)
| Bestellbetrag | International |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| €50 und mehr | €4 |
Wichtiger Hinweis:
- Bitte überprüfen Sie den Lagerort auf der Produktseite, bevor Sie Ihre Bestellung aufgeben, um die Lieferzeiten zu bestätigen.
- FFür Produkte im Shenzhen-Lager versenden wir die Produkte in der Regel zuerst vom Shenzhen-Lager zu unserem Münchner Lager oder Long Beach Lager, was etwa 1,5 Wochen dauert. Nachdem wir die Sendung in München/Long Beach erhalten haben, senden wir die Artikel an Sie. Wir arrangieren den YunExpress-Versand aus Shenzhen nur für Bestellungen mit Produkten im Shenzhen-Lager im Wert von mehr als 50 €.
- Wenn Wenn Sie eine Bestellung mit Produkten aus den Lagern in München und Shenzhen aufgeben, versenden wir zunächst die Produkte aus dem Münchner Lager und senden Ihnen die restlichen Produkte, sobald wir sie aus Shenzhen erhalten.
3. Internationales Lager
3.1 Deutsches Lager
3.2 US-Lager
3.3 Chinesisches Lager
4. Zoll und Steuern
4.1 Wie werden Zollformalitäten von OpenELAB bei Import oder Export gehandhabt?
4.2 Wie wird die Mehrwertsteuer berechnet, wenn der Kunde eine Bestellung bei OpenELAB aufgibt?
4.3 Welche Gebühren werden außer der Mehrwertsteuer erhoben?
Gültigkeitsdatum: 7. August 2025
Bei OpenELAB verpflichten wir uns, genaue Produktbeschreibungen zu liefern und hochwertige Produkte bereitzustellen. Sollten Sie Probleme mit Ihrem Kauf haben, benachrichtigen Sie uns bitte innerhalb von 30 Tagen nach Versanddatum.
1. Garantieausschluss
Sofern nicht ausdrücklich in einer spezifischen Vereinbarung oder Bestellung angegeben, übernimmt OpenELAB keine ausdrücklichen oder stillschweigenden Garantien hinsichtlich der Eignung, Zweckmäßigkeit oder Marktgängigkeit eines Produkts für einen bestimmten Zweck oder eine spezielle Verwendung.
2. Garantiepolitik
Garantiezeitraum
Die Standardgarantiezeit für von OpenELAB verkaufte Produkte beträgt 12 Monate ab Lieferdatum.
Im Rahmen dieser Garantie wird OpenELAB angemessene Anstrengungen unternehmen, um Produkte kostenlos zu reparieren oder zu ersetzen, wenn Mängel auf Probleme mit Rohmaterialien, Design oder Herstellung zurückzuführen sind.
Wenn der Mangel unter diese Richtlinie fällt, aber außerhalb des abgedeckten Umfangs liegt, können angemessene Kosten für Reparatur oder Ersatz anfallen.
Nach Ablauf der Garantiezeit kann Support gegen eine angemessene Gebühr weiterhin verfügbar sein.
Garantieausschlüsse
Die Garantie gilt nicht in folgenden Fällen:
- Das Produkt liegt außerhalb der 12-monatigen Garantiezeit.
- Schäden durch unsachgemäße Verwendung, falsche Wartung oder Lagerung oder Nichtbeachtung der Bedienungsanleitung.
- Probleme, die durch höhere Gewalt verursacht werden (z. B. Naturkatastrophen, Krieg, gesetzliche Änderungen usw.).
- Unbefugte Reparaturversuche durch den Kunden.
- Das Produkt ist nicht defekt, wurde jedoch geöffnet und ist laut Richtlinie nicht rückgabefähig.
3. Rücksendungen & Rückerstattungen
Wenn Sie mit Ihrem Kauf nicht zufrieden sind, können Sie für eine Rückgabe oder einen Umtausch berechtigt sein:
- Rückgabe zur Rückerstattung: Innerhalb von 15 Tagen nach Erhalt (ungeöffnet).
- Rückgabe zum Austausch: Innerhalb von 30 Tagen nach Erhalt (beschädigt oder defekt).
- Umtauschfrist: Bis zu 30 Tage ab Erhalt.
Bitte senden Sie uns eine E-Mail an info@openelab.io für eine Rücksendeautorisierung, bevor Sie etwas zurücksenden.
Rückgabebedingungen
- Artikel müssen sich in originalem, sauberem und einwandfreiem Zustand mit intakter Verpackung befinden.
- Rücksendungen von beschädigten, gebrauchten, zerkratzten, modifizierten oder programmierten Artikeln werden nicht akzeptiert.
- Fügen Sie den Beleg, eine kurze Notiz mit Ihrem Namen, der Bestellnummer und dem Rücksendegrund bei.
Versand & Gebühren
- Kunden sind für die Rücksendung an unsere Lager in Europa, den USA oder China verantwortlich.
- Wenn eine Rücksendung aus Kundenanliegen (z. B. Meinungsänderung, falsche Bestellung usw.) beantragt wird, werden sowohl die ursprünglichen Versandkosten als auch die Rücksendekosten vom Rückerstattungsbetrag abgezogen.
- Bei Rücksendungen aus Kundenanliegen erstellen und stellen wir ein Rücksendeetikett zur Verfügung.
Zahlungsplattformgebühren
Für alle Rückerstattungen, die aus Kundenanliegen beantragt werden, wird eine Standard-Servicegebühr vom Rückerstattungsbetrag abgezogen, die von den Zahlungsplattformen erhoben wird. Die spezifischen Gebühren sind wie folgt:
Shopify Payments: 1,8% + 0,3 €
PayPal: 4,4%
