 openelab.de
openelab.de
 openelab.com
openelab.com












































































































Waveshare 5+1 DOF Hochdrehmoment Serieller Bus Servo Roboterarm Bausatz
Shipping within 72 hours
*Excluding pre-order items
- • EU- & US-Lieferung: 10 Arbeitstage
- • Andere Länder: 15 Arbeitstage
Brauchen Sie es schneller? Kontaktieren Sie uns per Telefon oder E-Mail für eine beschleunigte Lieferung.
Waveshare 5+1 DOF Hochdrehmoment Serieller Bus Servo Roboterarm Bausatz
Der RoArm-M3 ist ein 5 + 1 DOF Hochdrehmoment Serial-Bus Servo Roboterarm-Kit, basierend auf ESP32. Er verfügt über ein 2-DOF Handgelenkgelenk, unterstützt flexible Erweiterungen und Sekundärentwicklung, drahtlose Steuerung und ist kompatibel mit LeRobot für fortgeschrittene KI-Anwendungen.

Produktvorstellung
Die RoArm-M3 Serie ist ein 5 + 1 DOF intelligenter Roboterarm, der für innovative Anwendungen entwickelt wurde. Er verfügt über eine leichte Struktur mit einer effektiven Nutzlast von 0,2kg@0,5m, die eine flexible Montage auf verschiedenen mobilen Plattformen ermöglicht. Eine 360° omnidirektionale Basis kombiniert mit fünf flexiblen Gelenken schafft einen Arbeitsbereich mit einem Durchmesser von 1 Meter.
Das direkt angetriebene Gelenkdesign verbessert die Repositionsgenauigkeit und strukturelle Zuverlässigkeit, wobei die innovative Doppelantriebstechnologie das Drehmoment des Schultergelenks verdoppelt. Das an Bord befindliche ESP32 MCU Hauptsteuerungsmodul unterstützt mehrere drahtlose Steuerungsmodi und bietet umfangreiche Steuerungsinterfaces und Kommunikationsprotokolle für einfache Geräteanbindung.
Eine benutzerfreundliche, plattformübergreifende WEB-Anwendung bietet einen einfachen, visualisierten Koordinatensteuerungsmodus für einen leichten Einstieg. Umfassende Grafik- und Video-Tutorials ermöglichen schnelles Lernen. Kompatibel mit ROS2 und verschiedenen Host-Computern unterstützt sie mehrere drahtlose und kabelgebundene Kommunikationsmodi. Erweiterungsplatinen erlauben die Anpassung des EoAT (End of Arm Tooling) zur Erfüllung vielfältiger Anwendungsanforderungen.
Die RoArm-M3 Serie unterstützt auch das beliebte KI-Roboterarm-Projekt LeRobot, integriert dessen vortrainierte Modelle, Datensätze mit Demonstrationen und Simulationsumgebungen. Dies bietet starke Unterstützung für Forschung in Deep Learning, Imitationslernen und Verstärkungslernen. Entwickler können intelligente Algorithmen schnell mit LeRobots Demos und Algorithmusbibliotheken auf dem RoArm-M3 bereitstellen und so die Möglichkeiten für innovative Anwendungen erweitern.
Die RoArm-M3 Serie erreicht eine hervorragende Balance zwischen leichtem Design, Benutzerfreundlichkeit, Erweiterbarkeit und offener Innovation. Es ist ein multifunktionaler Roboterarm, ideal für Anwendungen, die Flexibilität, Erweiterbarkeit und einfache Bedienung erfordern, und integriert intelligente Steuerung, Mensch-Maschine-Interaktion und anpassbare Entwicklung.
Versionsoptionen
Wählen Sie zwischen dem RoArm-M3-S und RoArm-M3-Pro. Der RoArm-M3-Pro verfügt über 5 komplett metallene ST3235 Bus-Servos, die verbesserte Haltbarkeit und stabile Spielfreiheit bieten, die sich mit der Nutzung nicht erhöht.

Parametervergleich
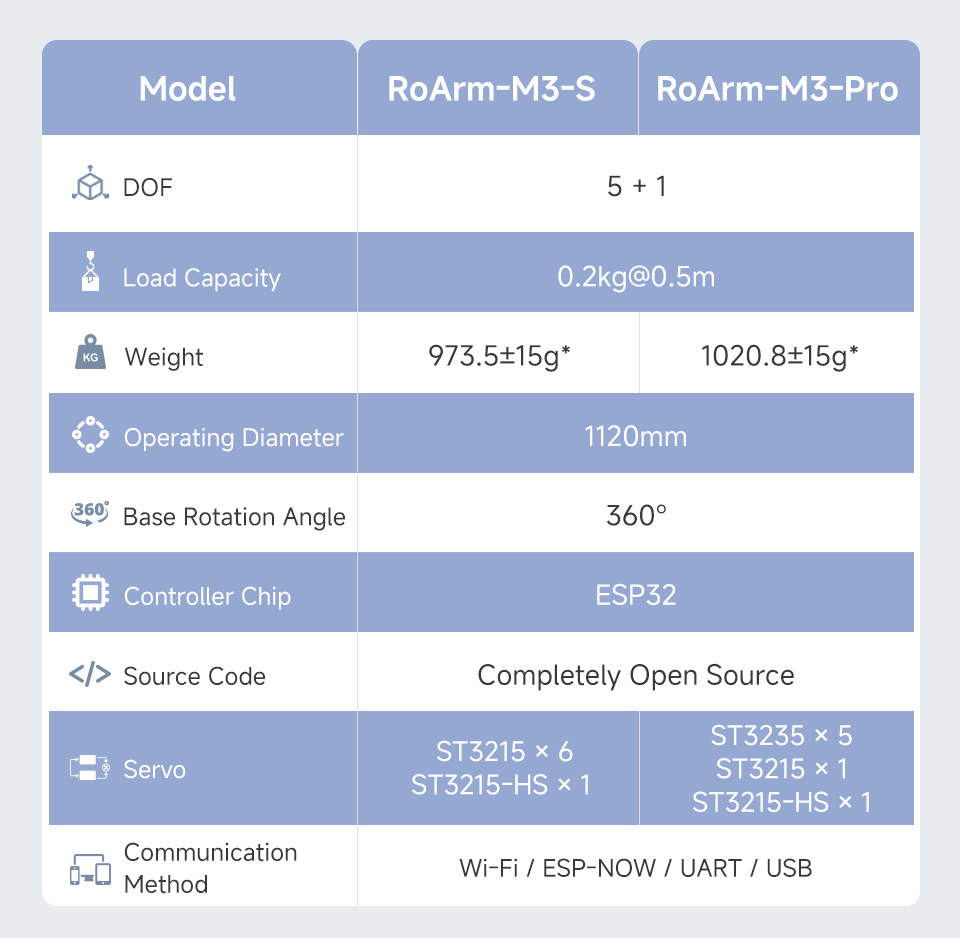
* Gewicht der Tischklemmenbefestigung (290±10g) nicht enthalten.
Kompatibel mit dem beliebten KI-Roboterarm-Projekt - LeRobot
Die RoArm-M3 Roboterarm-Serie integriert sich nahtlos in das Open-Source LeRobot Framework auf Hugging Face. Dies bietet Kernressourcen wie vortrainierte Modelle, Datensätze aus menschlichen Demonstrationen und Simulationsumgebungen. In Kombination mit einem N-VIDIA Jetson Orin NX Mainboard oder einem PC mit einer N-VIDIA diskreten GPU können Nutzer den kompletten Prozess von Imitationslernen und Verstärkungslernen erleben.
Flexible Gelenke & omnidirektionaler Raum
Mit einer 360°-Drehbasis und flexiblen Gelenken schafft der RoArm-M3 einen omnidirektionalen Arbeitsraum mit einem Durchmesser von 1 Meter, der freie Bewegungen in alle Richtungen ermöglicht.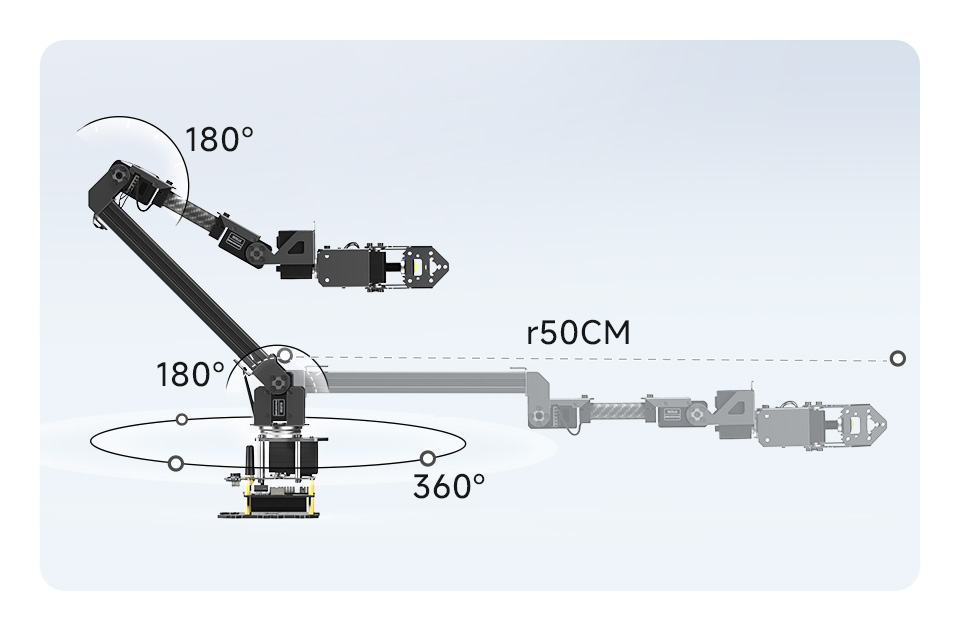
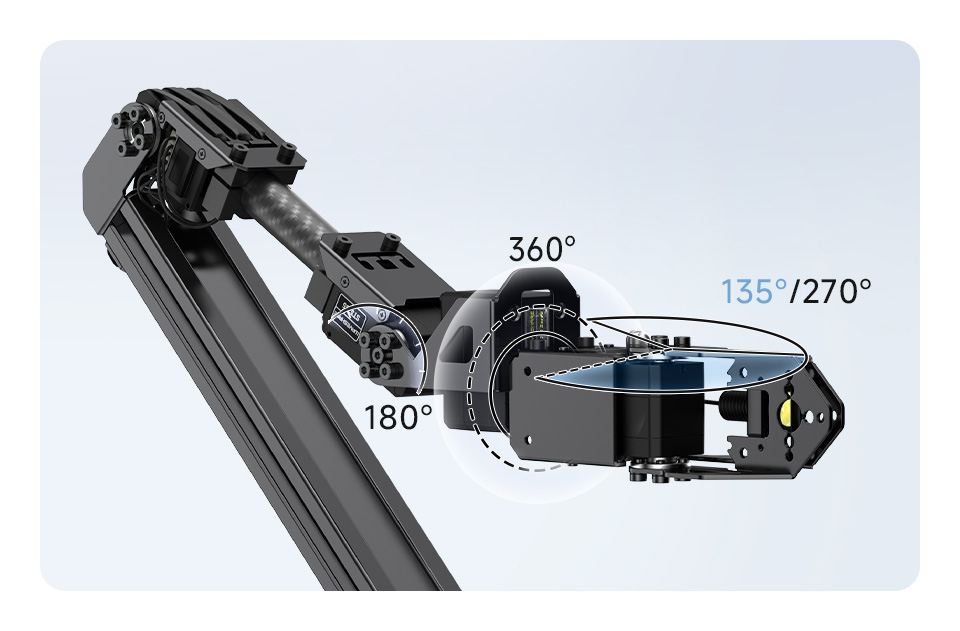
2 DOF Handgelenkgelenk + EoAT für flexibleres Klemmen
Ausgestattet mit einem 2-DOF-Handgelenkgelenk, das Neigungs- und horizontale Drehunterstützung bietet, gewährleistet dieser Roboterarm eine nahtlose Koordination mit dem End of Arm Tooling (EoAT) für multidimensionales Klemmen und Arbeiten.
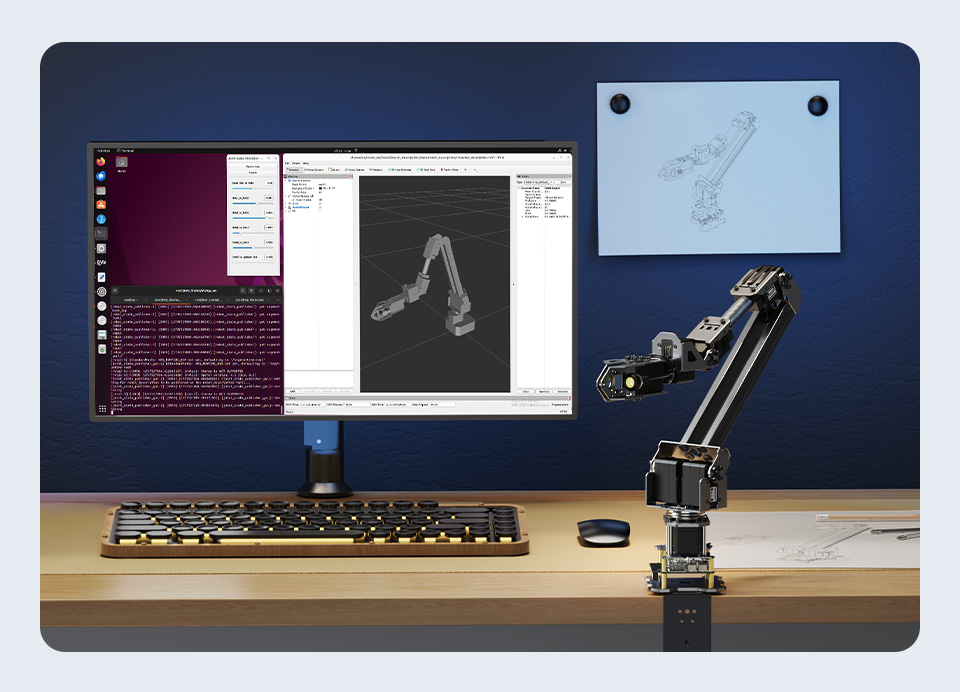
Einfache Steuerung über plattformübergreifende Webanwendung
Keine App-Installation erforderlich. Greifen Sie über eine einfache Webanwendung auf Mobiltelefonen, Tablets oder Computern auf den RoArm-M3 zu und steuern Sie ihn. Diese Open-Source-Web-App unterstützt auch die Sekundärentwicklung für benutzerdefinierte Benutzeroberflächen und neue Funktionen.

Vollständig Open Source für Sekundärentwicklung
Die Steuerungscodes und Kommunikationsschnittstellendokumente der RoArm-M3-Serie sind vollständig Open Source und unterstützen die Sekundärentwicklung in mehreren Sprachen und Geräten. Modularisierte Demos und Tutorials werden bereitgestellt, um Anfängern den Einstieg zu erleichtern.
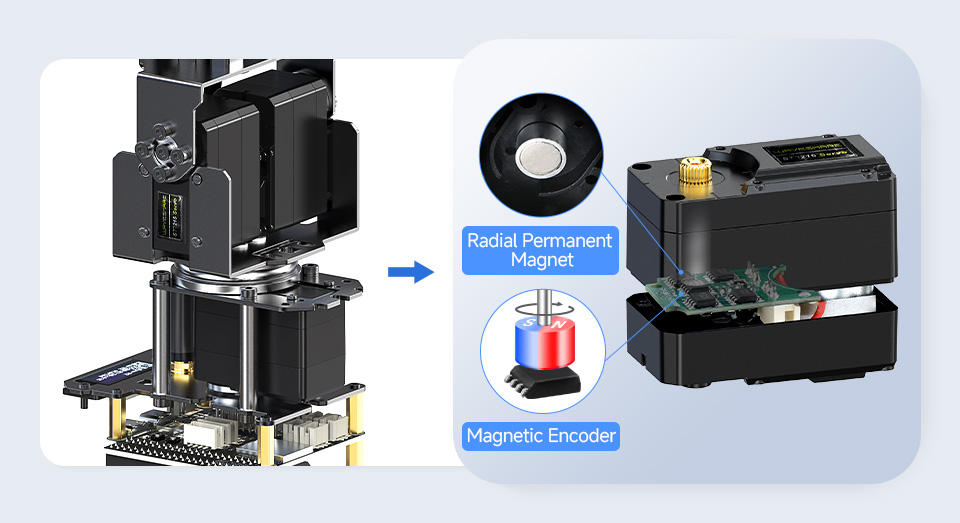
Direktantriebs-Gelenkdesign: Rückmeldegenauigkeit bis zu 0,088°
Erreichen Sie eine hochgenaue Gelenkwinkelrückmeldung direkt über einen 12-Bit hochpräzisen magnetischen Encoder, ohne Untersetzungsgruppen. Dies ermöglicht eine präzise Berechnung der tatsächlichen Position des aktuellen Zielpunkts basierend auf der Rückmeldung.
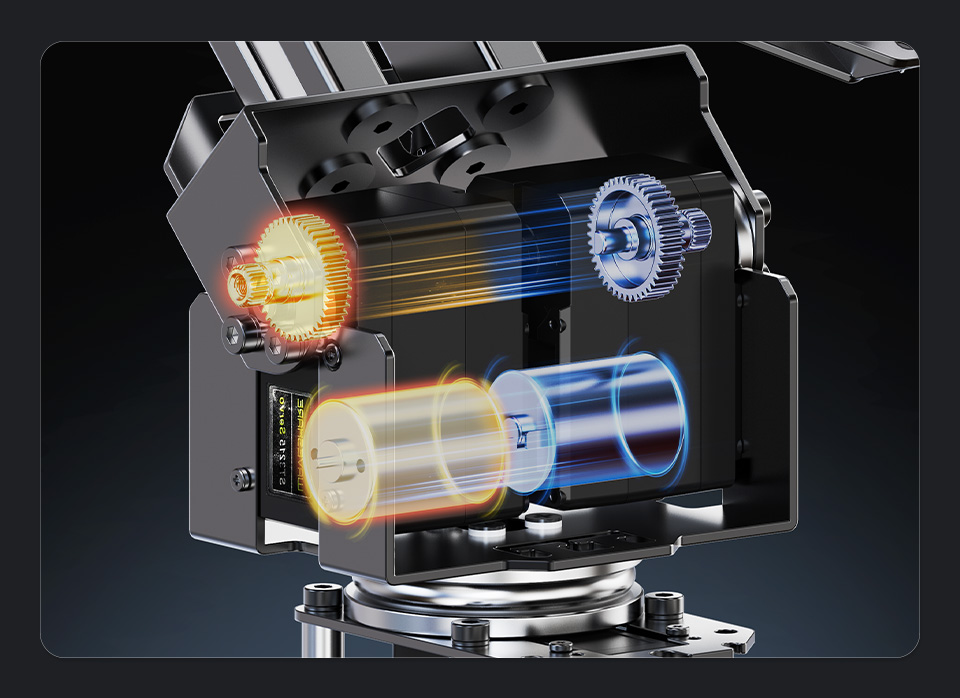
Innovative Dual-Drive-Technologie verdoppelt das Drehmoment des Schultergelenks
Ein speziell entwickelter Dual-Drive-Regelalgorithmus ermöglicht es zwei Servos am Schultergelenk, ihr Ausgangsdrehmoment effektiv zu koordinieren, was die Leistung und die Gesamtlastkapazität der RoArm-M3-Serie erheblich verbessert.
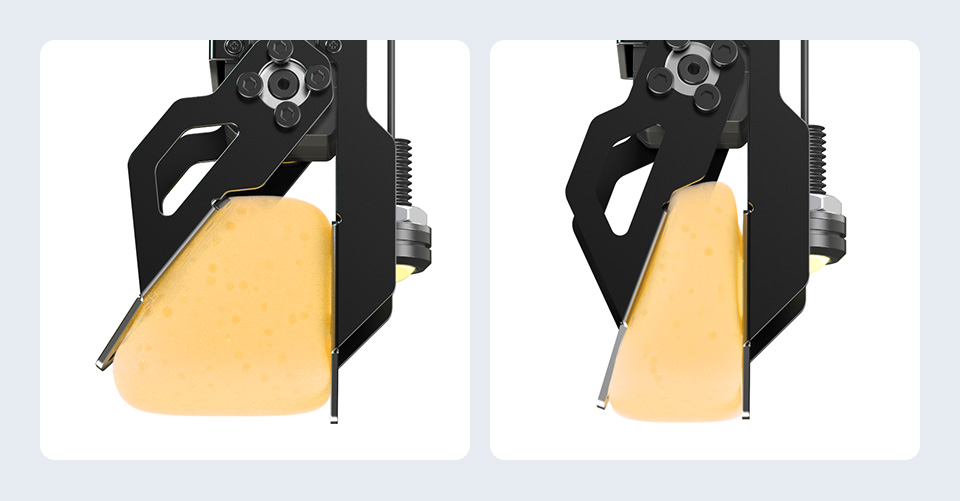
Direktantriebs-Klemme ermöglicht präzise Kraftsteuerung
Das Direktantriebs-Klemmendesign ermöglicht eine präzise programmatische Steuerung der Klemmkraft, was es ideal für den Umgang mit empfindlichen Objekten ohne übermäßigen Druck macht.
Dynamische adaptive Steuerung der äußeren Kraft
Aktivieren Sie diese Funktion, um das maximale Drehmoment für jedes Gelenk zu begrenzen. Wenn die äußere Kraft den konfigurierbaren Drehmomentgrenzwert überschreitet, dreht sich der Roboterarm als Reaktion darauf und kehrt bei Abnahme der Kraft in seine festgelegte Position zurück.

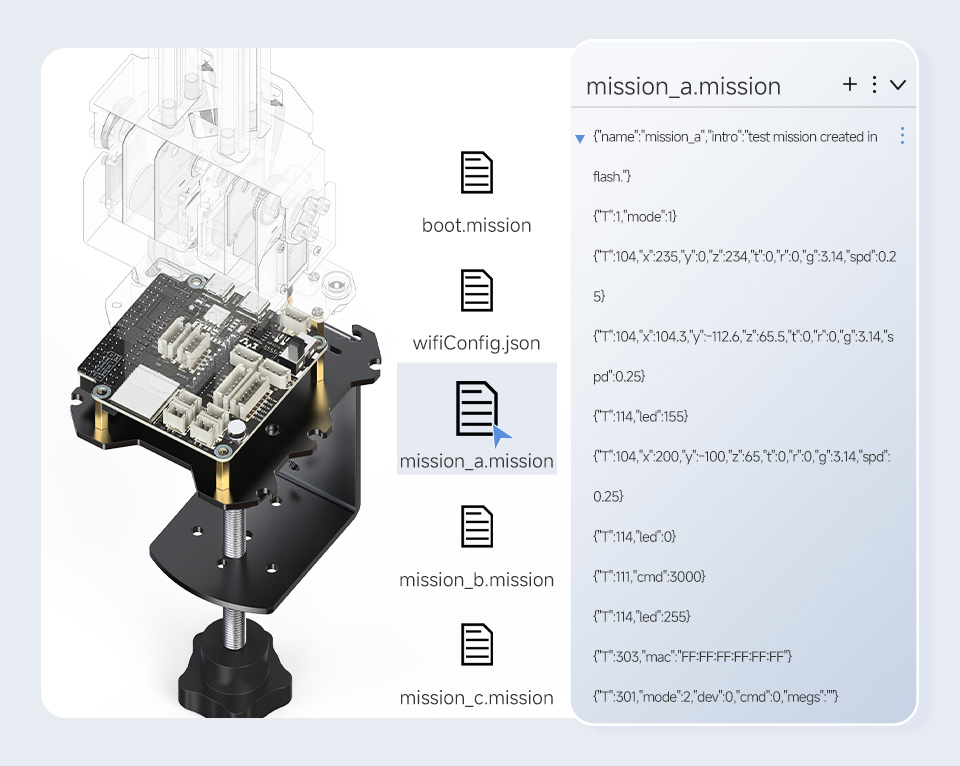
Ein-Klick-Automatische Aufzeichnung: Einfaches Erstellen von Aktionen
Der RoArm-M3 kann JSON-Anweisungen zur Robotersteuerung als Aufgaben-Dateien direkt im Flash-Speicher des ESP32 speichern, wodurch die Daten auch ohne Strom erhalten bleiben. Diese Aufgaben-Dateien ermöglichen es dem Roboterarm, komplexe und wiederholte Operationen auszuführen.
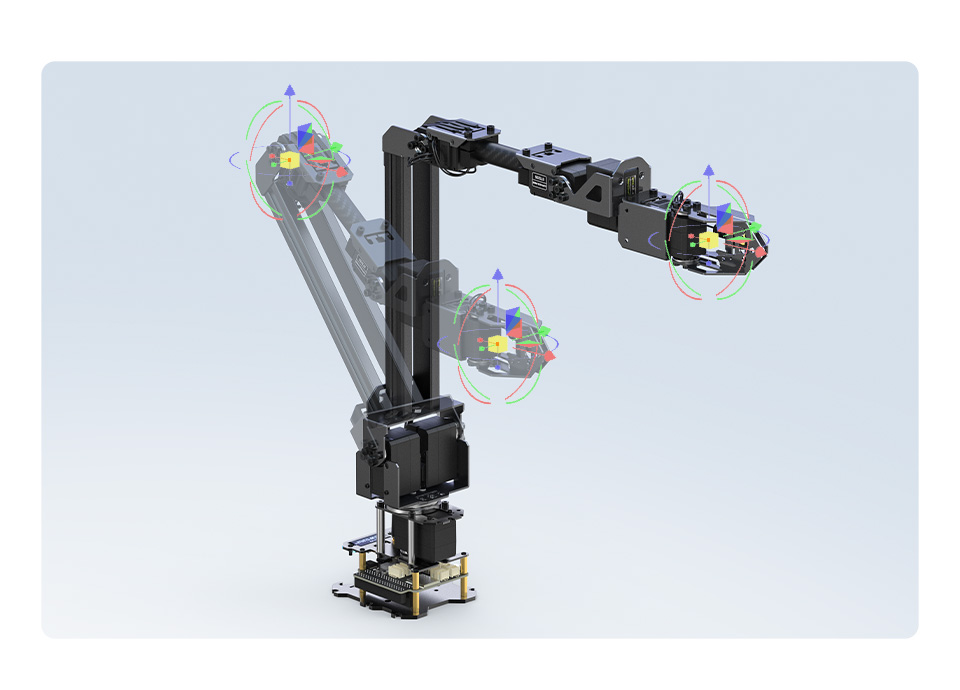
Zielgenaues Erreichen durch Eingabe von Koordinaten
Nutzen Sie den Open-Source-Algorithmus der inversen Kinematik im dreidimensionalen kartesischen Koordinatensystem. Durch Eingabe der Zielposition erreicht der Roboterarm den Punkt genau, indem er den Rotationswinkel jedes Gelenks berechnet.
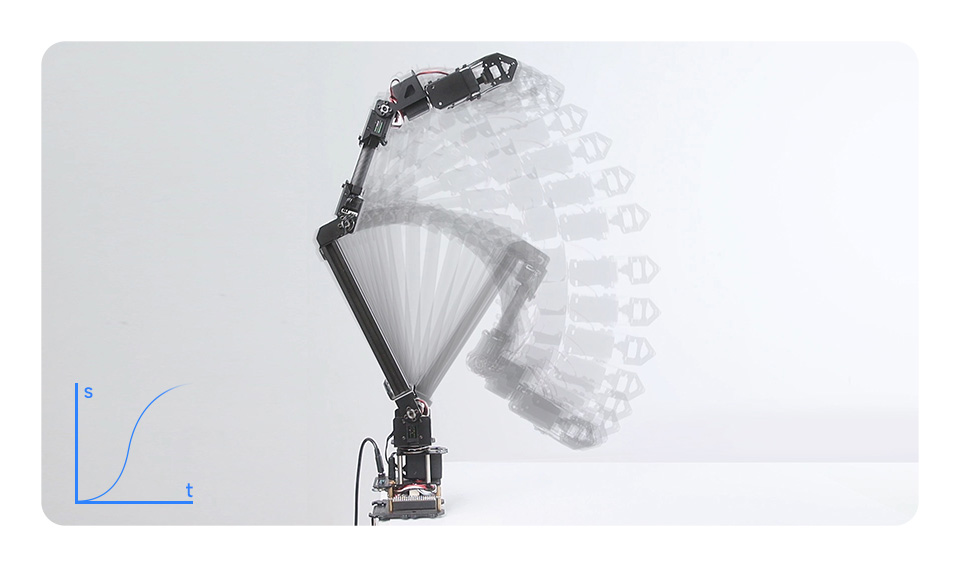
Kurvengeschwindigkeitsregelung für sanftere Bewegungen
Der Kurvengeschwindigkeitsregelungsalgorithmus sorgt für eine sanftere und natürlichere Bewegung des Roboterarms und eliminiert Oszillationen während Start- und Stoppphasen.
ESP-NOW Kabellose Steuerung: Verzögerungsarme Fernzusammenarbeit
ESP-NOW ist ein verzögerungsarmes Ad-hoc-Wireless-Kommunikationsprotokoll, das ohne Netzwerkinfrastruktur arbeitet. Steuern Sie mehrere Roboterarme drahtlos mit Broadcast-, Gruppen- oder Eins-zu-eins-Steuerungsmethoden.
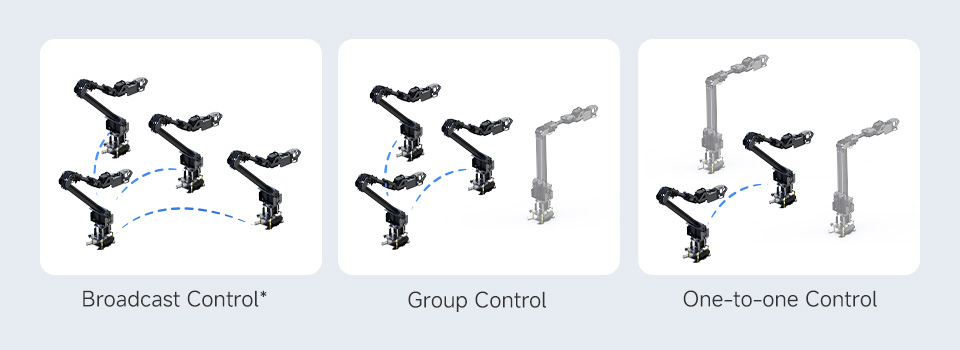
* Hinweis: Broadcast-Steuerung hat keine Gerätebeschränkungen, während die Gruppensteuerung bis zu 20 Geräte unterstützt. Details siehe WIKI.
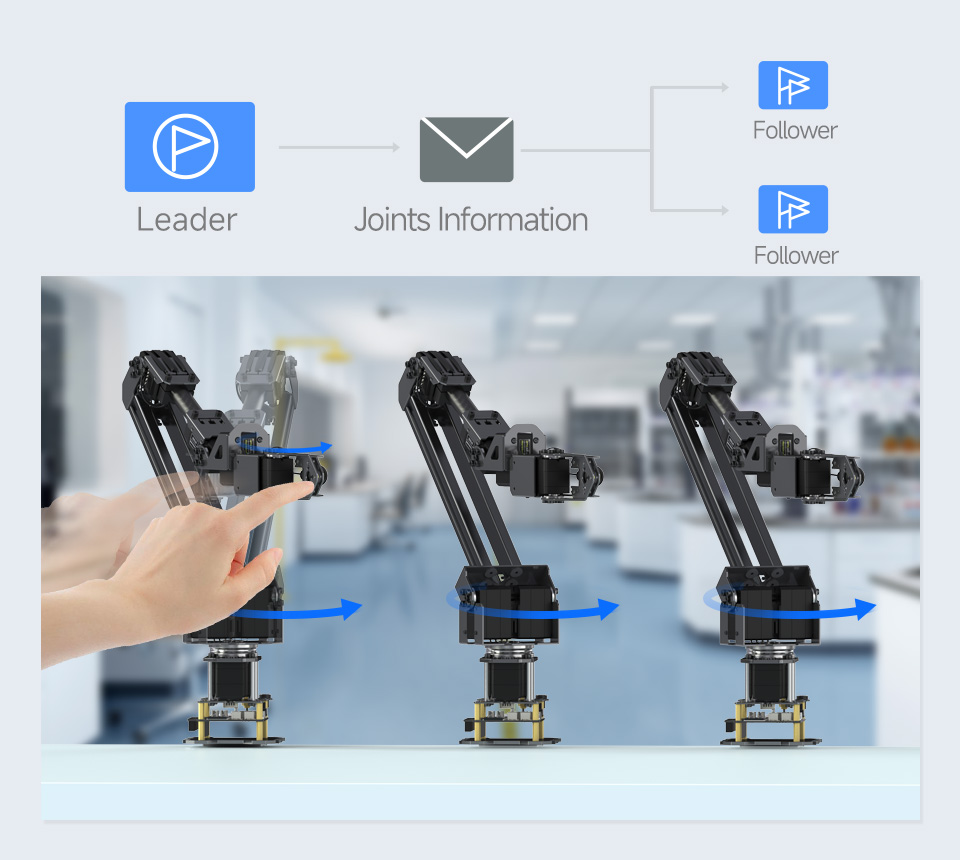
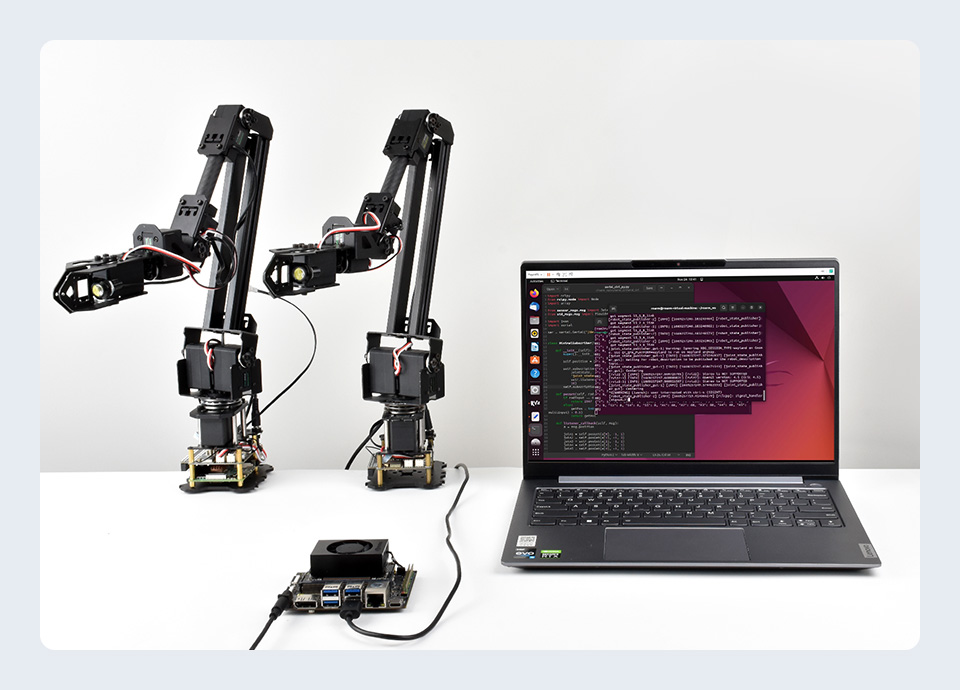
Unterstützt Führer-Nachfolger-Steuermodus basierend auf ESP-NOW
Im Führer-Nachfolger-Steuermodus überträgt der Führer-Roboterarm seine Gelenkwinkelinformationen über ESP-NOW. Nachfolger-Roboterarme imitieren diese Bewegungen dann in Echtzeit präzise.
Mehrere Steuerungsschnittstellen, Multi-Geräte- und Sprachunterstützung
Über die WEB-Anwendung hinaus kann die RoArm-M3-Serie über HTTP-Protokoll-Netzwerkanfragen, serielle Kommunikation oder USB-Kommunikation gesteuert werden, indem JSON-Befehle gesendet und Rückmeldungen von verschiedenen Controllern empfangen werden.
Mehrere Installationsmethoden zur Integration in Ihre Anwendung
Verschiedene Installationsschemata und Ressourcen für die Sekundärentwicklung werden bereitgestellt, die eine flexible Integration in diverse Projekte und Anwendungen ermöglichen.

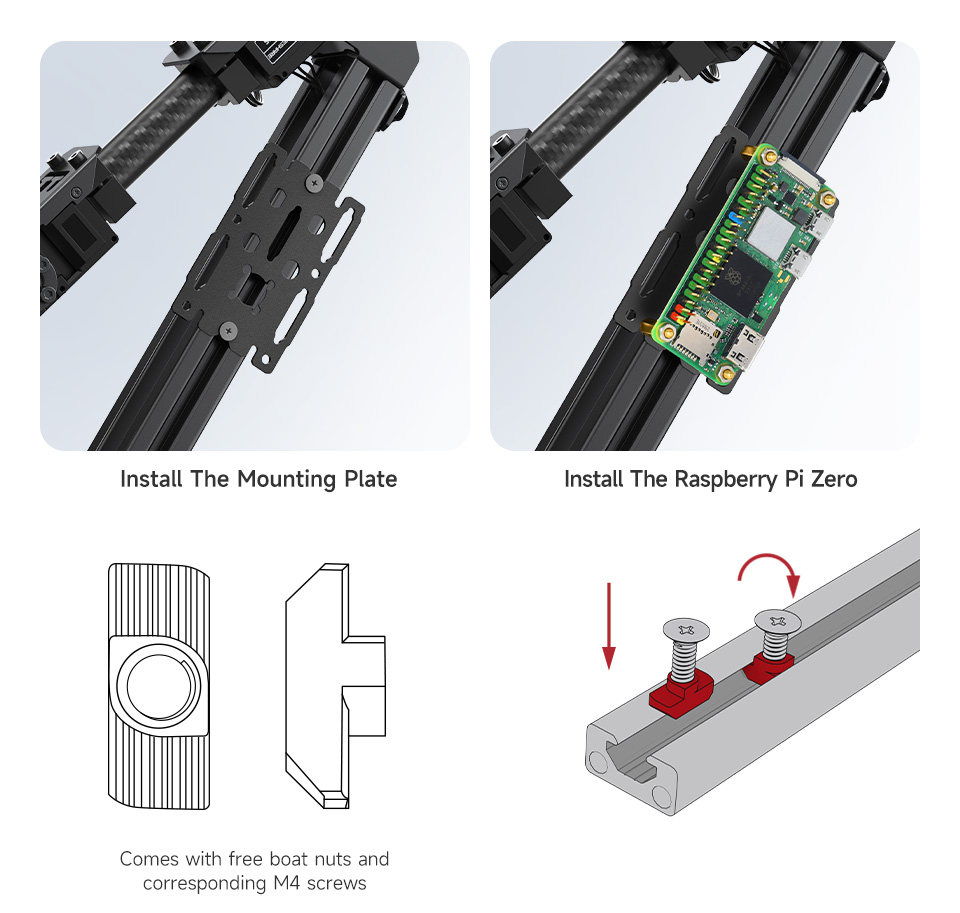
Einfache Installation verschiedener Peripheriegeräte
Die Hauptstruktur des Oberarms verfügt über zwei 1020 Aluminiumprofile nach europäischem Standard, die eine einfache Installation zusätzlicher Peripheriegeräte mit Bootmuttern und M4-Schrauben ermöglichen, um spezifische Anforderungen zu erfüllen.
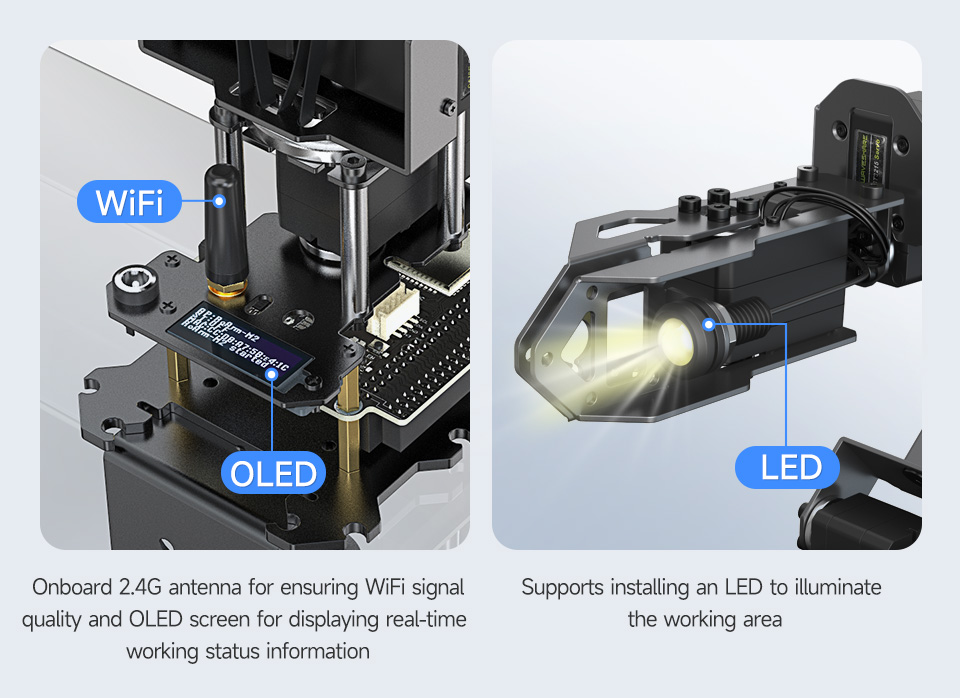
Unterstützt die Installation einer Kamera zur Erweiterung visueller Anwendungen
Enthält einen Kamerahalter und Open-Source-Zeichnungen. Direkt kompatible Kameras installieren oder andere für erweiterte visuelle Anwendungen anpassen.
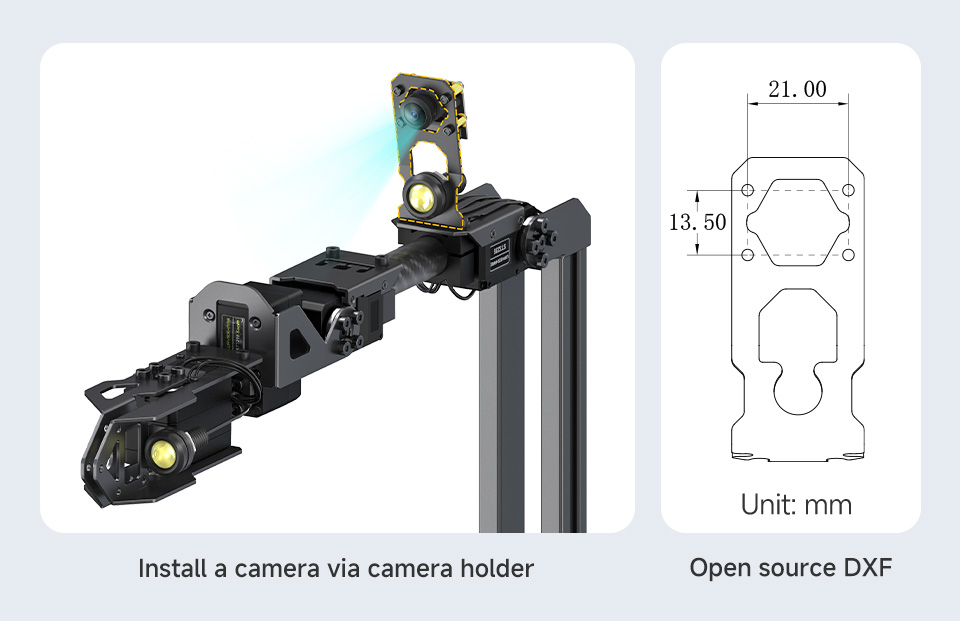
* nur als Referenz, nur die LED-Leuchte ist enthalten.
Onboard ESP32 Hauptsteuerplatine
Verfügt über einen leistungsstarken ESP32 Hauptsteuer-MCU, der mehrere drahtlose Kommunikationsprotokolle unterstützt, mit umfangreichen Open-Source-Ressourcen zur Erleichterung der Sekundärentwicklung innovativer Anwendungen.
Kompatibel mit ROS2: Bietet Modell-Erstellungsdatei und unterstützt Multi-Geräte-Kooperation
Bietet ROS2-Kommunikationsknoten, eine URDF-Modellbeschreibungsdatei und ein anfängerfreundliches ROS2-Tutorial.
Reiche Tutorial-Ressourcen für die Sekundärentwicklung
Umfassende Einheiten-Tutorials und Beispiele zu verschiedenen Funktionen und gängigen Anwendungsszenarien helfen Benutzern, die Sekundärentwicklung schnell zu beherrschen.
Allgemeine Treiberplatine für Roboter
Das Onboard-Treiberboard verfügt über reichhaltige Schnittstellen und Ressourcen für innovative Entwicklung und Funktionserweiterung.
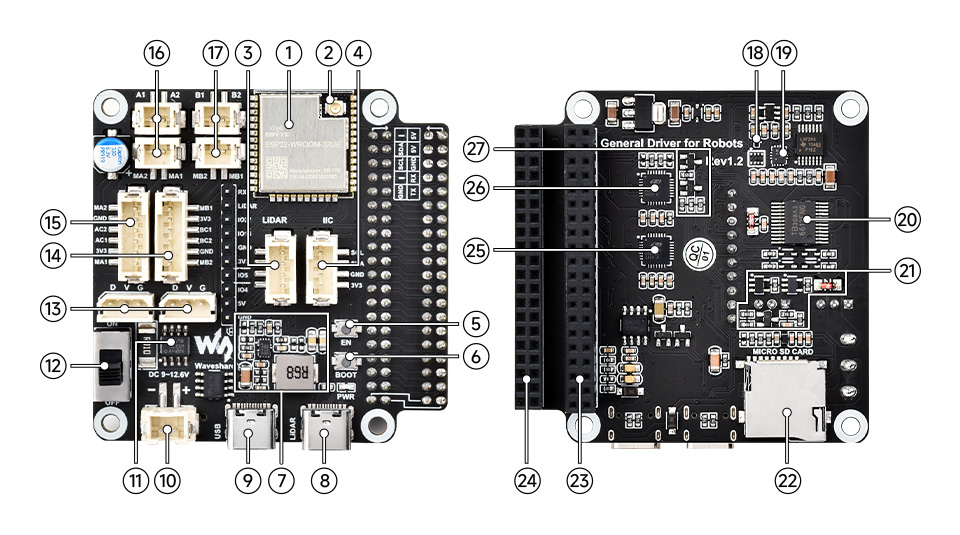
- ESP32-WROOM-32 Steuerungsmodul: Kann mit der Arduino IDE entwickelt werden.
- IPEX 1 WIFI Anschluss: Zum Anschluss einer WIFI-Antenne zur Erhöhung der drahtlosen Kommunikationsreichweite.
- LIDAR Schnittstelle: Integrierte LIDAR Adapterfunktion.
- I2C Peripherie-Erweiterungsschnittstelle: Zum Anschluss von OLED-Bildschirm oder anderen I2C-Sensoren.
- Reset-Taste: Drücken und loslassen, um den ESP32 neu zu starten.
- Download-Taste: Beim Einschalten drücken, um in den Download-Modus zu gelangen.
- DC-DC 5V Spannungsregler-Schaltung: Versorgt Host-Computer wie Raspberry Pi oder Jetson Nano mit Strom.
- Type-C Anschluss (LADAR): LIDAR Datenübertragung.
- Type-C Anschluss (USB): ESP32 Kommunikationsschnittstelle, zum Hochladen von Programmen auf den ESP32.
- XH2.54 Stromanschluss: Unterstützt DC 7~13V Eingang, kann die Serien-Bus Servos und Motoren direkt mit Strom versorgen.
- INA219: Spannungs-/Stromüberwachungs-Chip.
- Strom EIN/AUS: Externe Stromversorgung EIN/AUS.
- ST Serien-Bus Servo Schnittstelle: Zum Anschluss an ST3215 / ST3235 Serien-Bus Servos.
- Motoranschluss PH2.0 6P: Gruppe B Schnittstelle für Motor mit Encoder.
- Motoranschluss PH2.0 6P: Gruppe A Schnittstelle für Motor mit Encoder.
- Motoranschluss PH2.0 2P: Gruppe A Schnittstelle für Motor ohne Encoder.
- Motoranschluss PH2.0 2P: Gruppe B Schnittstelle für Motor ohne Encoder.
- AK09918C: 3-Achsen elektronischer Kompass.
- QMI8658C: 6-Achsen-Bewegungssensor.
- TB6612FNG: Motorsteuerungs-Chip.
- Serial-Bus-Servo-Steuerschaltkreis: Zur Steuerung mehrerer ST3215 Serial-Bus-Servos und zum Erhalten von Servorückmeldungen.
- TF-Kartensteckplatz: Kann zum Speichern von Protokollen oder WIFI-Konfigurationen verwendet werden.
- 40PIN GPIO-Header: Zum Anschluss an Raspberry Pi oder andere Host-Boards.
- 40PIN Erweiterungsheader: Einfacher Zugriff auf die GPIO-Pins des Raspberry Pi oder anderer Host-Boards.
- CP-2102: UART zu USB, für LIDAR-Datenübertragung.
- CP-2102: UART zu USB, für ESP32-Kommunikation.
- Automatischer Download-Schaltkreis: Zum Hochladen von Programmen auf den ESP32 ohne Drücken der EN- und BOOT-Tasten.
Vielfältige Onboard-Ressourcen unterstützen Funktionserweiterungen
Integriert mit INA219 Batterienspannungsüberwachung und einem 9-Achsen IMU-Sensor, was umfangreiche Funktionserweiterungen und Innovationen ermöglicht.

Maus Drag-and-Drop-Interaktion
Verwenden Sie Webanwendungen und Desktop-Software (Open-Source-Python-Programme), um Aktionsanweisungen mit Mausklicks und -loslassen festzulegen und so eine flexible Steuerung des Roboterarms zu ermöglichen.

Spezifikationen
| Funktion | Details |
|---|---|
| DOF | 5 + 1 |
| Arbeitsbereich | Horizontaler Durchmesser: 1120mm (Max, 360° omnidirektional), Vertikal: 798mm (Max) |
| Betriebsspannung | 12V 5A Netzteil, unterstützt 3S Lithiumbatterien (NICHT enthalten) |
| Tragfähigkeit | 0.2kg@0.5m |
| Rückstellgenauigkeit | ~ 5mm |
| Servodrehgeschwindigkeit | 40 U/min (Leerlauf, keine Drehmomentbegrenzung) |
| Arbeitsbereich | BASIS-360°, SCHULTER-180°, ELLBOGEN-225°, HAND-135°/270° |
| Antriebstyp | TTL Serieller Busservo, Direktantriebsgelenk |
| Servonummern | 7 |
| Gelenkwinkelsensor | 12-Bit 360° Magnetencoder |
| Servodrehmoment | 30KG.CM @12V, 20KG·CM @ 12V (EoAT) |
| Gelenkrückmeldungsinformationen | Servostatus, Gelenkwinkel, Drehgeschwindigkeit, Gelenkbelastung, Servospannung, Servostrom, Servotemperatur und Servoarbeitsmodus |
| Hauptsteuerung | ESP32-WROOM-32 |
| Hauptsteuerungsmodul Funktionen | WiFi, BT, Dual Core, 240MHz |
| Drahtloser Steuerungsmodus | 2,4G-WiFi, ESP-NOW |
| Kabelgebundener Steuerungsmodus | USB, UART |
| Manueller Betriebsmodus | WEB-Steueroberfläche |
| Host-Betriebsmodus | UART / USB / WEB-Befehle im JSON-Datenformat |
| Host-Unterstützung | USB-Verbindungsgeräte wie Raspberry Pi, Jetson Orin Nano und PC. |
| EoAT-Funktion | Standardmäßig Klemmenfunktion, kann als zusätzlicher Freiheitsgrad geändert werden |
| LED-Leistung | ≤1,5W |
| OLED-Bildschirmgröße | 0.91inch |
| Weitere Funktionen | 2-Kanal 12V Stromversorgungsschalter, 9-DOF IMU |
| Gewicht des Roboterarms | RoArm-M3-S: 973,5±15g RoArm-M3-Pro: 1020,8g±15g (Ohne das Gewicht der Tischkantenbefestigungsklammer) |
| Gewicht der Tischkantenbefestigungsklammer | 290±10g |
| Unterstützte Tischkantenstärke der Klemme | 72mm |
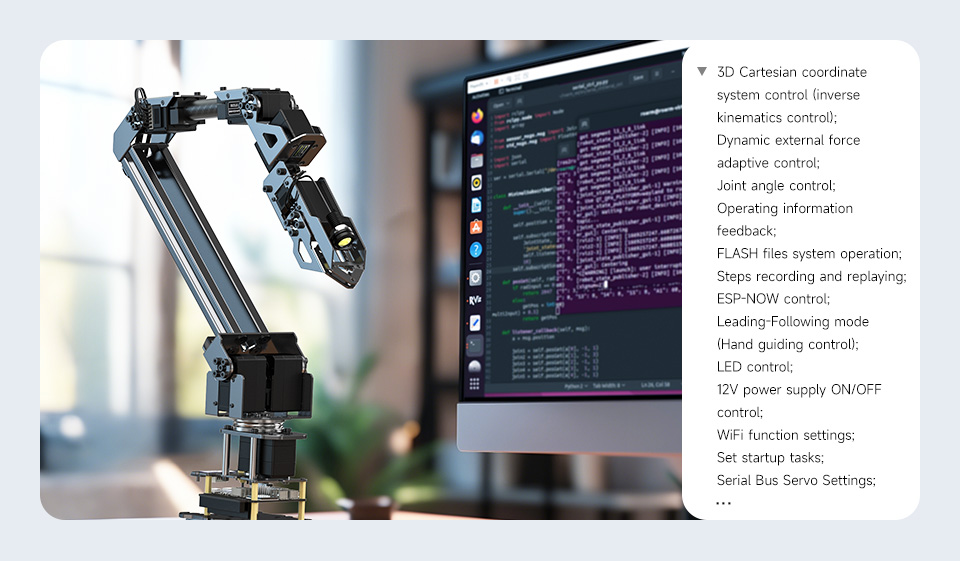
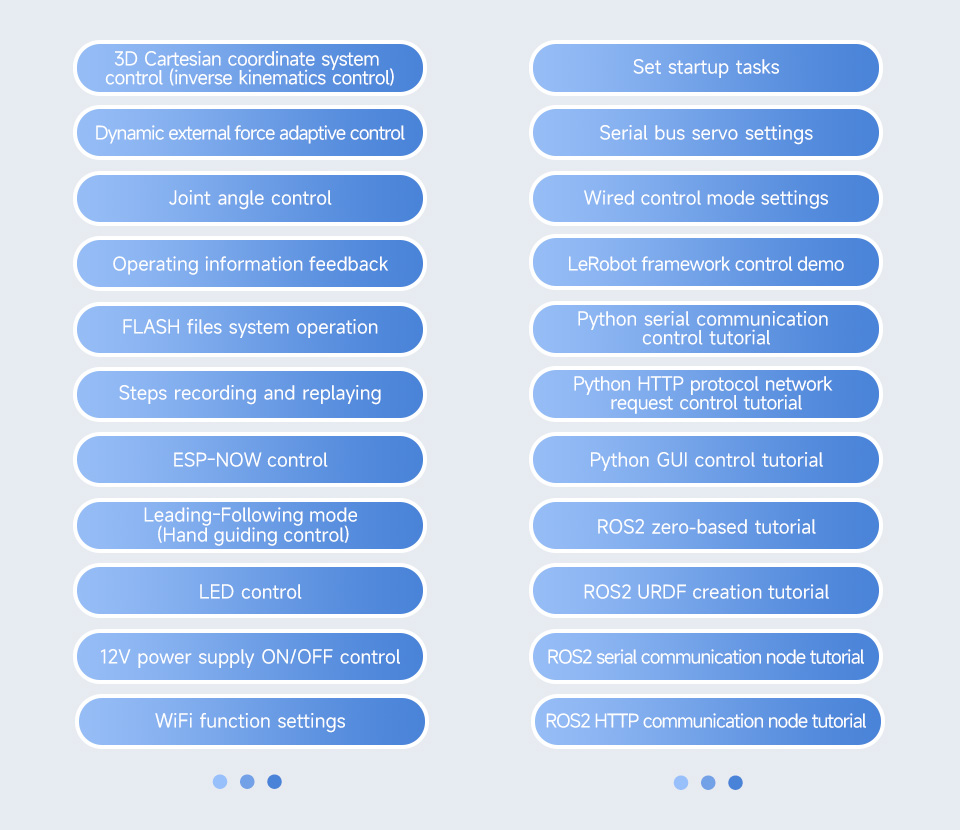
| Demo | 3D-Kartesisches Koordinatensystemsteuerung (Inverse Kinematik Steuerung); Dynamische externe Kraft adaptive Steuerung; Gelenkwinkelsteuerung; Betriebsinformationsrückmeldung; FLASH-Dateisystembetrieb; Schrittaufzeichnung und Wiedergabe; ESP-NOW Steuerung; Führer-Folger-Modus (Handführungssteuerung); LED-Steuerung; 12V Stromversorgung EIN/AUS Steuerung; WiFi-Funktionseinstellungen; Startaufgaben festlegen; Serial-Bus-Servo-Einstellungen; Rückmeldemodus-Einstellung usw. (Hinweis: Bitte beachten Sie das WIKI für weitere Details) |
Produkt- & Verpackungsausstellung

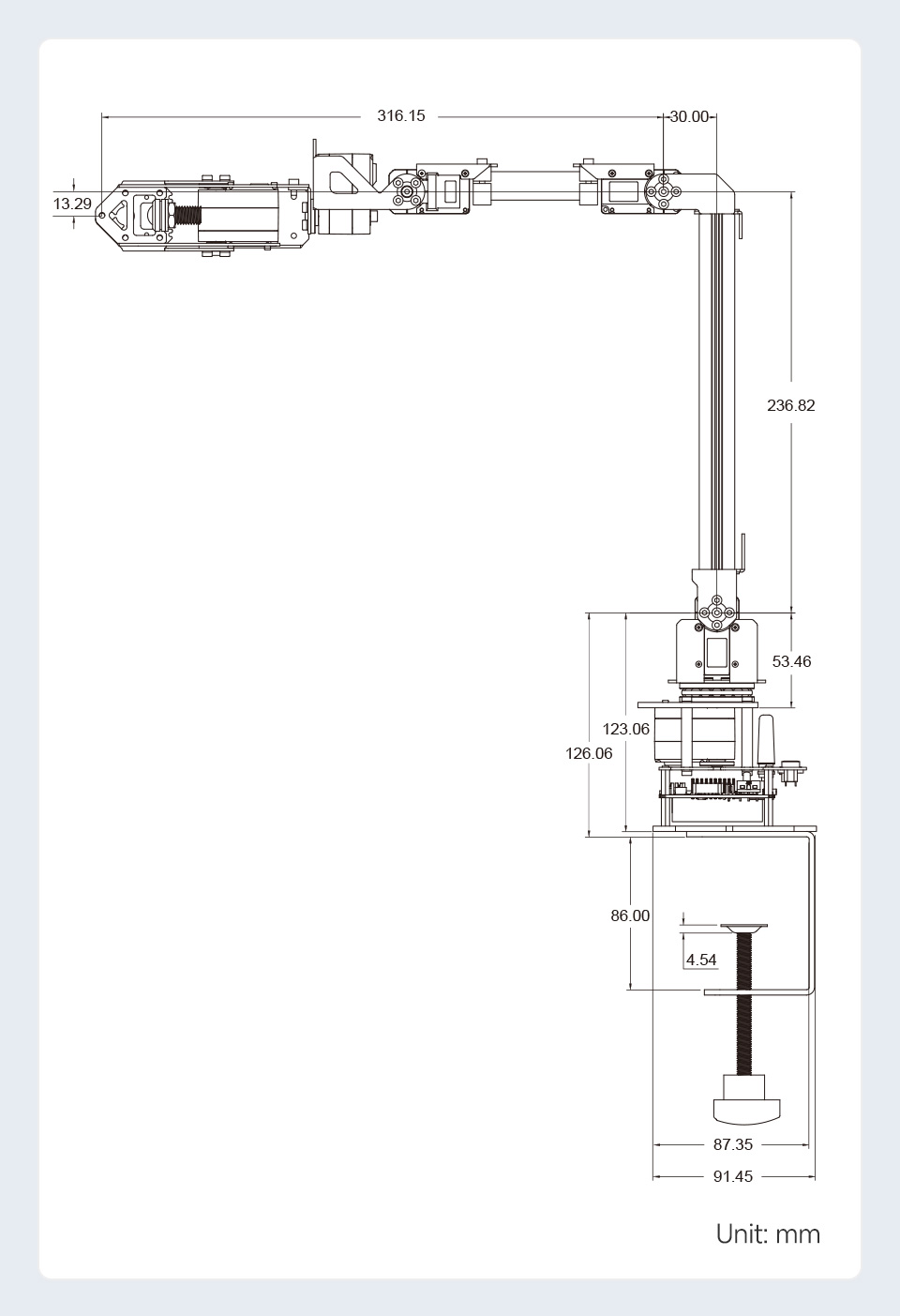
Abmessungen
1. Allgemeine Versandinformationen
- Wir bieten Premium-Versandmethoden mit Sendungsverfolgungsnummer für jede Bestellung an.
- Versandadressen müssen auf Englisch ohne Sonderzeichen eingegeben werden, damit das Kurierunternehmen Ihre Adresse im System erkennen kann. Wir versenden strikt nach der von Ihnen angegebenen Versandadresse. Bitte informieren Sie uns über Adressänderungen, bevor Ihre Bestellung den Status „Versandt“ erhält, um Paketverlust zu vermeiden.
- Bitte kontaktieren Sie umgehend unseren Kundenservice, wenn Sie eine Bestellung stornieren oder ändern möchten. Sobald Ihre Bestellung den Status „Versandt“ erreicht hat, kann sie nicht mehr storniert oder geändert werden. Um Komplikationen zu vermeiden, überprüfen Sie bitte Ihren Warenkorb vor dem Checkout erneut.
- Wir können alle vorrätigen Bestellungen innerhalb von 1 Werktag nach Bestätigung Ihrer Bestellung versenden.
- Alle Artikel werden vor dem Versand geprüft und sorgfältig von Hand verpackt.
- Bei der üblichen Kurierpraxis müssen Sie den Inhalt des Pakets vor der Annahme Ihrer Ware überprüfen. Andernfalls übernehmen wir keine Verantwortung für Schäden, die während des Transports entstanden sein könnten.
🚀 Brauchen Sie schnelleren Versand?
Wenn Sie eine beschleunigte Lieferung (Express) benötigen, kontaktieren Sie bitte unser Kundensupport-Team unter info@openelab.io für ein individuelles Angebot, das auf Ihren Standort zugeschnitten ist.
2. Versandkosten & Optionen
Unsere Versandkosten werden basierend auf dem Bestellwert und dem Zielort berechnet. Bitte entnehmen Sie die Details den untenstehenden Tabellen.
2.1 Deutschland (Inland)
| Versandart | Bestellwert | Kosten | Voraussichtliche Lieferung |
|---|---|---|---|
| Deutsche Post | €0 - €50.00 | €4.95 | 2-4 Werktage |
| Deutsche Post | Über 50,00 € | Kostenlos | 2-4 Werktage |
|
DHL Paket (Schnellere Lieferung) |
€0 - €50.00 | €6.95 | 1-3 Werktage |
|
DHL Paket (Schnellere Lieferung) |
€50.00 - €100.00 | €2.00 | 1-3 Werktage |
|
DHL Paket (Schnellere Lieferung) |
Über 100,00 € | Kostenlos | 1-3 Werktage |
2.2 Europäische Union (EU)*
*Einschließlich:
| Versandart | Bestellwert | Kosten | Voraussichtliche Lieferung |
|---|---|---|---|
| Deutsche Post | €0 - €100.00 | €7.95 | 5-9 Werktage |
| Deutsche Post | Über 100,00 € | Kostenlos | 5-9 Werktage |
|
DHL Paket (Schnellere Lieferung) |
€0 - €100.00 | €15.95 | 3-7 Werktage |
|
DHL Paket (Schnellere Lieferung) |
€100.00 - €250.00 | €7.95 | 3-7 Werktage |
|
DHL Paket (Schnellere Lieferung) |
Über 250,00 € | Kostenlos | 3-7 Werktage |
2.3 Vereinigte Staaten
| Region | Versandart | Bestellwert | Kosten | Voraussichtliche Lieferung |
|---|---|---|---|---|
|
Festland USA (50 Bundesstaaten) |
USPS Ground Advantage | €0 - €45.00 | €5.95 | 3-7 Werktage |
| USPS Ground Advantage | Über 45,00 € | Kostenlos | 3-7 Werktage | |
| USPS Priority Mail | €0 - €45.00 | €16.95 | 1-4 Werktage | |
| USPS Priority Mail | Über 45,00 € | €14.95 | 1-4 Werktage | |
|
Nicht-kontinentale USA (AK, HI, PR, etc.) |
USPS Ground Advantage | €0 - €60.00 | €6.95 | 5-9 Werktage |
| USPS Ground Advantage | Über 60,00 € | Kostenlos | 5-9 Werktage |
* Die Regionen in den nicht-kontinentalen USA umfassen: Alaska, Amerikanisch-Samoa, Guam, Hawaii, die Marshallinseln, die Nördlichen Marianen, Palau, Puerto Rico, die Amerikanischen Jungferninseln und alle Adressen der US-Streitkräfte. Der Versand und die Lieferung in diese Gebiete unterliegen den Versandregeln für die nicht-kontinentalen USA.
2.4 International (außerhalb der EU)
Für bestimmte internationale Ziele, einschließlich Schweiz, Vereinigtes Königreich und Norwegen.
| Bestellwert | Versandkosten |
|---|---|
| €0 - €300.00 | €19.95 |
| Über 300,00 € | Kostenlos |
Wichtiger Hinweis:
- Bestandsstatus: Bitte prüfen Sie den Bestandsstatus auf der Produktseite. Unser System zeigt den Echtzeitbestand für unsere Lager in München und Long Beach an. Wenn ein Artikel an diesen Standorten nicht vorrätig ist, wird er als "Vorbestell" gekennzeichnet. Sie können diese Artikel dennoch bestellen.
- Vorbestellabwicklung: Für "Vorbestell"-Artikel organisieren wir die effizienteste Logistiklösung, um sicherzustellen, dass Sie Ihre Ware so schnell wie möglich erhalten. Ihr Paket kann direkt aus unserem Lager in Shenzhen versendet werden. Alternativ transportieren wir die Ware im Rahmen unseres Standard-Nachfüllprozesses zunächst in unser Lager in München oder Long Beach (in der Regel 5-10 Werktage), bevor wir sie an Sie versenden.
- Geteilte Sendungen: Wenn Ihre Bestellung sowohl vorrätige als auch Vorbestellartikel enthält, versenden wir die vorrätigen Artikel aus dem lokalen Lager sofort. Die verbleibenden Vorbestellartikel werden Ihnen in einer separaten Sendung zugeschickt, sobald sie bereit sind.
3. Internationales Lager
Unsere Produkte werden in unseren Lagern in München, Long Beach und Shenzhen gelagert, um flexiblere Logistiklösungen anzubieten, die auf verschiedene Regionen und Kundenbedürfnisse zugeschnitten sind. Auf der Produktdetailseite geben wir den genauen Lagerstandort an, damit Sie Ihren Einkauf und Lieferplan besser planen können.
3.1 Deutsches Lager
Für Produkte, die in unserem Lager in München gelagert sind, verwenden wir je nach Paketgröße entweder Deutsche Post oder DHL für den Versand. Die Logistik innerhalb Deutschlands ist sehr effizient, mit einer geschätzten Lieferzeit von 2-4 Werktagen, sodass Sie Ihre Bestellung schnell und bequem erhalten. Für westeuropäische EU-Länder beträgt die geschätzte Lieferzeit 4-6 Werktage. Für osteuropäische EU-Länder beträgt die geschätzte Lieferzeit 6-8 Werktage.
3.2 US-Lager
Für Produkte, die in unserem Lager in Long Beach gelagert sind, verwenden wir je nach Paketgröße entweder USPS oder UPS für den Versand. Die Logistik innerhalb der USA ist sehr effizient, mit einer geschätzten Lieferzeit von 3-7 Werktagen, sodass Sie Ihre Bestellung schnell und bequem erhalten.
3.3 Chinesisches Lager
Für Vorbestellartikel oder Bestellungen, die direkt aus unserem Shenzhen-Lager versendet werden, nutzen wir YunExpress für zuverlässigen internationalen Versand. Aufgrund der Komplexität des internationalen Versands beträgt die geschätzte Lieferzeit für diese Pakete etwa 10 Werktage, kann jedoch aufgrund von Zollprozessen oder anderen unkontrollierbaren Faktoren leicht variieren. Andernfalls werden Produkte vor der endgültigen Lieferung in unseren Lagern in München oder den USA nachbestückt, wie im oben genannten "Wichtigen Hinweis" beschrieben.
4. Zoll und Steuern
4.1 Wie werden Zollformalitäten von OpenELAB für Import oder Export gehandhabt?
Für EU-Mitgliedstaaten: Ob Versand aus Deutschland oder China, wir übernehmen alle Einfuhrzölle und Steuern (DDP), sodass Sie Ihr Paket ohne zusätzliche Kosten oder Probleme mit dem Zoll erhalten.
Für Länder außerhalb der Europäischen Union, wie Schweiz und Norwegen, können bei der Lieferung Einfuhrzölle, Steuern und/oder Zollgebühren anfallen. Diese Gebühren variieren von Land zu Land und liegen in der alleinigen Verantwortung des Empfängers.
⚠️ Lieferverweigerung: Wenn Sie sich weigern, diese Gebühren bei Lieferung zu zahlen und das Paket an uns zurückgesendet wird, wird der Rückerstattungsbetrag nach Abzug der ursprünglichen Versandkosten, Rücksendekosten sowie etwaiger Zoll- oder Lagergebühren berechnet.
4.2 Wie wird die Mehrwertsteuer berechnet, wenn der Kunde eine Bestellung bei OpenELAB aufgibt?
Gemäß den neuesten Mehrwertsteuer-E-Commerce-Regeln in der EU hat OpenELAB das Recht, den Mehrwertsteuerbetrag beim Checkout zu berechnen. Der angewandte Standard-Mehrwertsteuersatz richtet sich nach den Vorschriften des Ziellandes. Für diese Bestellungen wird bei der Lieferung keine zusätzliche Mehrwertsteuer berechnet.



