 openelab.de
openelab.de
 openelab.com
openelab.com












































































































Kit de brazo robótico servo de bus en serie de alto torque y 5+1 DOF Waveshare
Shipping within 72 hours
*Excluding pre-order items
- • Entrega en la UE y EE. UU.: 10 días laborables
- • Otros países: 15 días laborables
¿Lo necesitas más rápido? Contáctanos vía teléfono o correo electrónico para entrega acelerada.
Kit de brazo robótico servo de bus en serie de alto torque y 5+1 DOF Waveshare
El RoArm-M3 es un kit de brazo robótico servo de bus en serie de alto torque 5 + 1 DOF, basado en ESP32. Cuenta con una articulación de muñeca de 2 DOF, soporta expansión flexible y desarrollo secundario, control inalámbrico, y es compatible con LeRobot para aplicaciones avanzadas de IA.

Introducción al producto
La serie RoArm-M3 es un brazo robótico inteligente de 5 + 1 DOF diseñado para aplicaciones innovadoras. Cuenta con una estructura ligera con una carga útil efectiva de 0.2kg@0.5m, permitiendo un montaje flexible en diversas plataformas móviles. Una base omnidireccional de 360° combinada con cinco articulaciones flexibles crea un espacio de trabajo con un diámetro de 1 metro.
Su diseño de accionamiento directo en las articulaciones mejora la precisión de reposicionamiento y la fiabilidad estructural, con tecnología innovadora de doble accionamiento que duplica el torque de la articulación del hombro. El módulo de control principal MCU ESP32 a bordo soporta múltiples modos de control inalámbrico, proporcionando amplias interfaces de control y protocolos de comunicación para una fácil conectividad de dispositivos.
Una aplicación WEB multiplataforma y fácil de usar ofrece un modo de control de coordenadas simple y visualizado para una fácil incorporación. Se proporcionan tutoriales gráficos y en video completos para un aprendizaje rápido. Compatible con ROS2 y varios ordenadores anfitriones, soporta múltiples modos de comunicación inalámbrica y por cable. Las placas de expansión permiten personalizar el EoAT (End of Arm Tooling) para satisfacer diversos requisitos de aplicación.
La serie RoArm-M3 también soporta el popular proyecto de brazo robótico AI LeRobot, integrando sus modelos preentrenados, conjuntos de datos con demostraciones y entornos de simulación. Esto proporciona un fuerte apoyo para la investigación en Deep Learning, Imitation Learning y Reinforcement Learning. Los desarrolladores pueden desplegar rápidamente algoritmos inteligentes en el RoArm-M3 usando las demos y bibliotecas de algoritmos de LeRobot, ampliando las posibilidades para aplicaciones innovadoras.
La serie RoArm-M3 logra un excelente equilibrio entre diseño liviano, facilidad de uso, expandibilidad e innovación abierta. Es un brazo robótico multifuncional ideal para aplicaciones que requieren flexibilidad, expandibilidad y facilidad de uso, integrando control inteligente, interacción hombre-máquina y desarrollo personalizable.
Opciones de versión
Elige entre RoArm-M3-S y RoArm-M3-Pro. El RoArm-M3-Pro cuenta con 5 servos de bus ST3235 totalmente metálicos, ofreciendo mayor durabilidad y un juego estable que no aumenta con el uso.

Comparación de parámetros
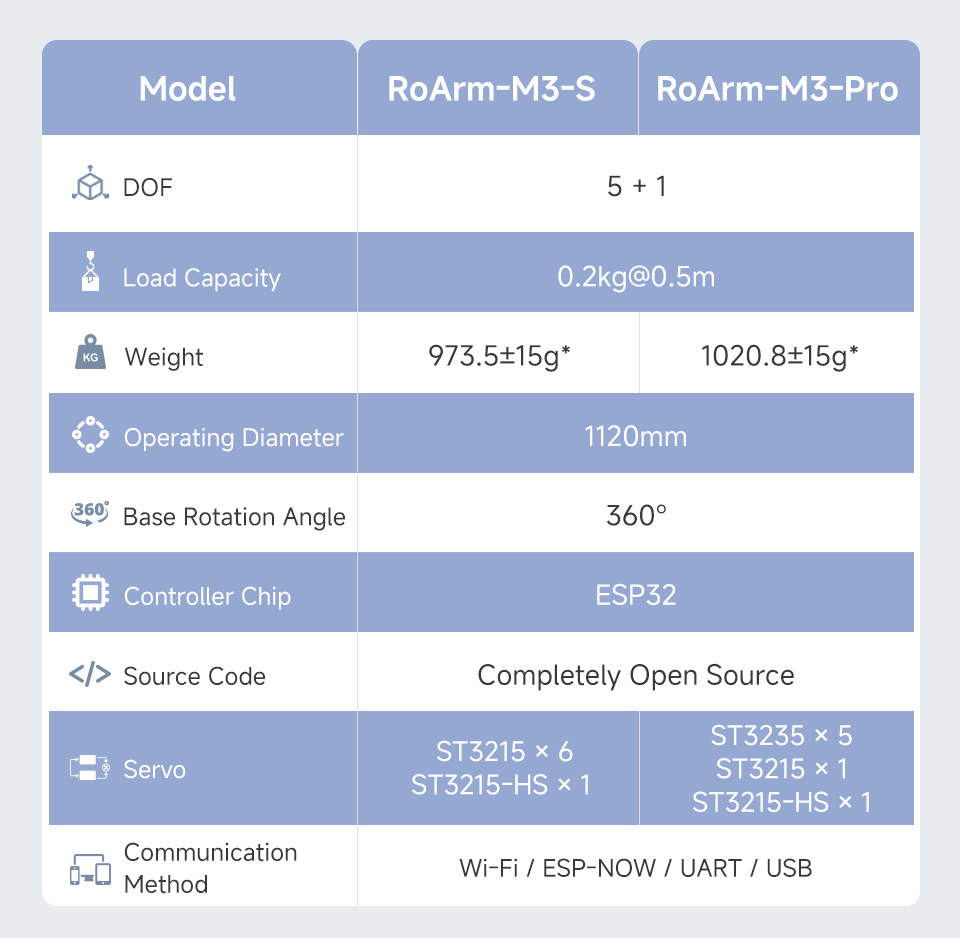
* No incluye el peso de la abrazadera de fijación al borde de la mesa (290±10g).
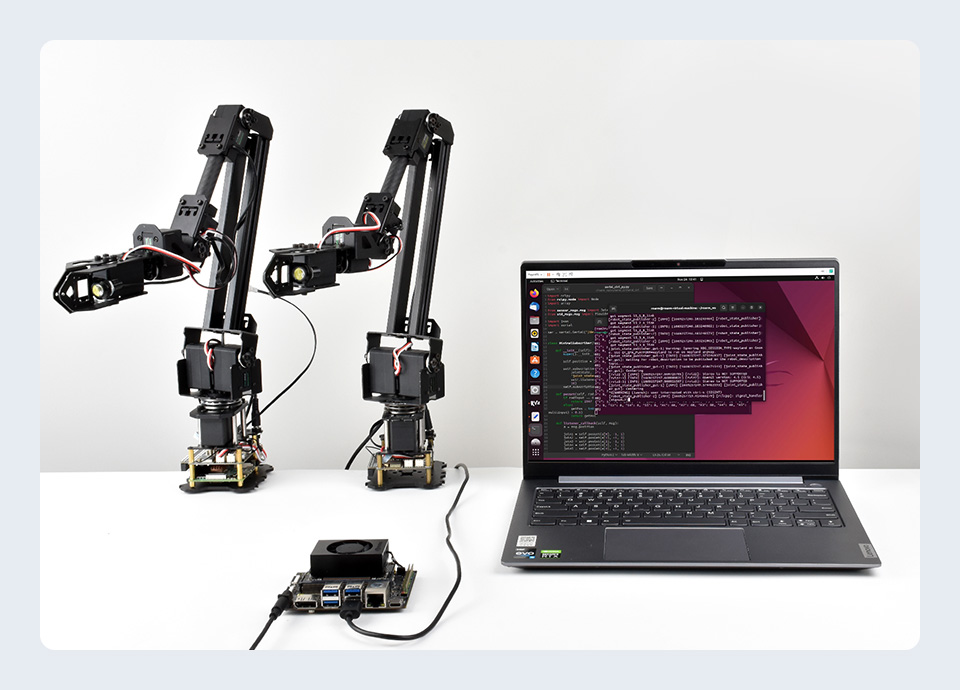
Compatible con el popular proyecto de brazo robótico AI - LeRobot
La serie de brazos robóticos RoArm-M3 se integra perfectamente con el framework de código abierto LeRobot en Hugging Face. Esto proporciona recursos centrales incluyendo modelos preentrenados, conjuntos de datos de demostraciones humanas y entornos de simulación. Al combinarse con una placa base N-VIDIA Jetson Orin NX o una PC con GPU discreta N-VIDIA, los usuarios pueden experimentar el proceso completo de proyectos de Aprendizaje por Imitación y Aprendizaje por Refuerzo.
Articulaciones flexibles y espacio omnidireccional
Con una base de rotación de 360° y articulaciones flexibles, el RoArm-M3 crea un espacio operativo omnidireccional con un diámetro de 1 metro, permitiendo movimiento libre en todas las direcciones.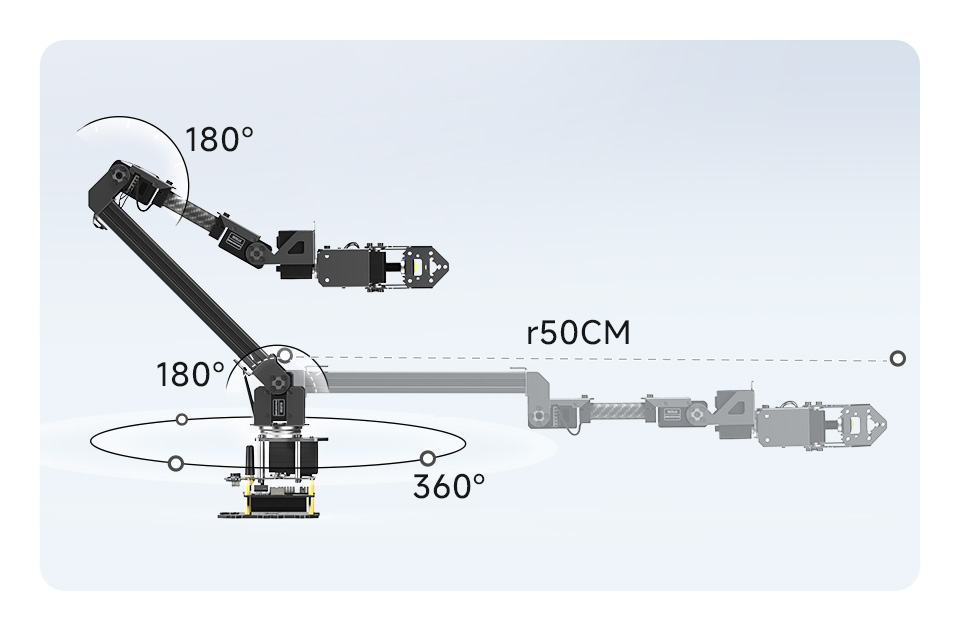
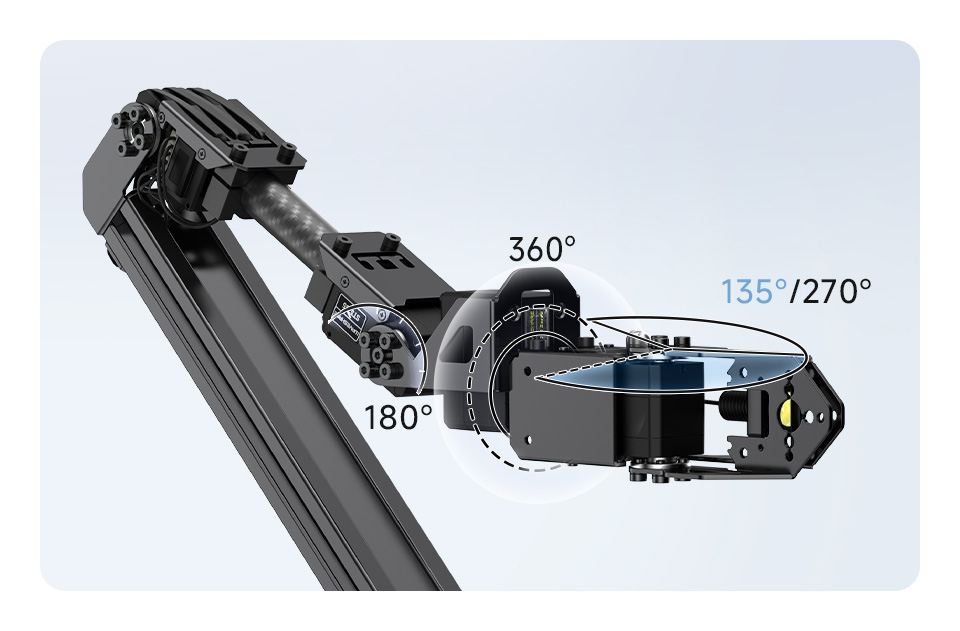
Articulación de muñeca de 2 DOF + EoAT para una sujeción más flexible
Equipado con una articulación de muñeca de 2 DOF que ofrece soporte de inclinación y rotación horizontal, este brazo robótico asegura una coordinación perfecta con la herramienta al final del brazo (EoAT) para sujeción y operación multidimensional.
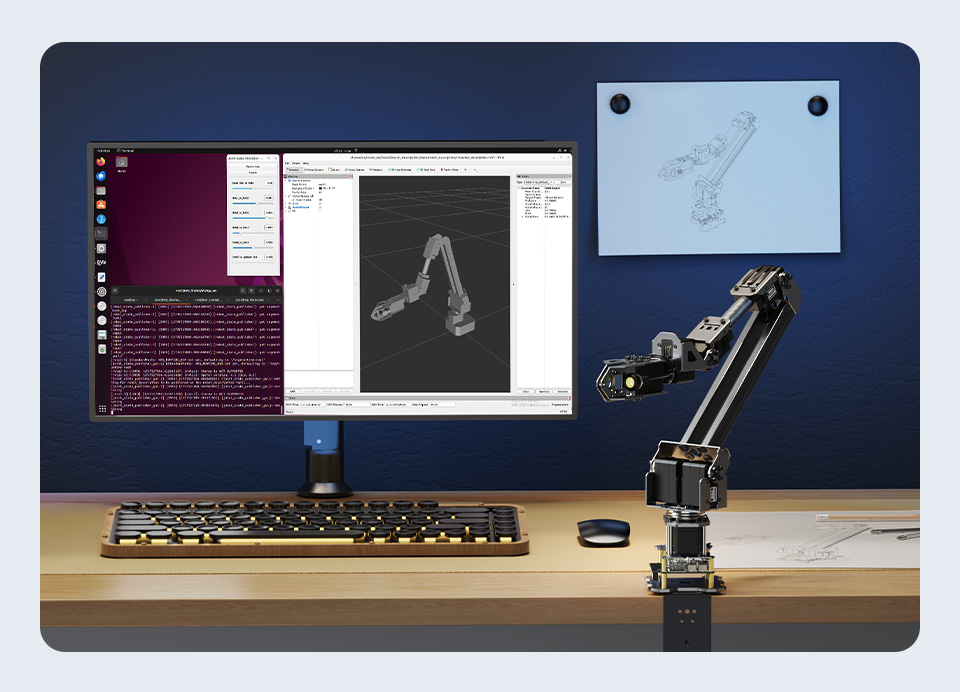
Fácil de controlar mediante aplicación web multiplataforma
No se requiere instalación de aplicación. Accede y controla el RoArm-M3 mediante una sencilla aplicación web en teléfonos móviles, tabletas o computadoras. Esta aplicación web de código abierto también soporta desarrollo secundario para interfaces de usuario personalizadas y nuevas funciones.

Completamente de código abierto para desarrollo secundario
Los códigos de control y los documentos de interfaz de comunicación para la serie RoArm-M3 son completamente de código abierto, soportando desarrollo secundario en múltiples idiomas y dispositivos. Se proporcionan demos y tutoriales modularizados para ayudar a los principiantes a comenzar fácilmente.
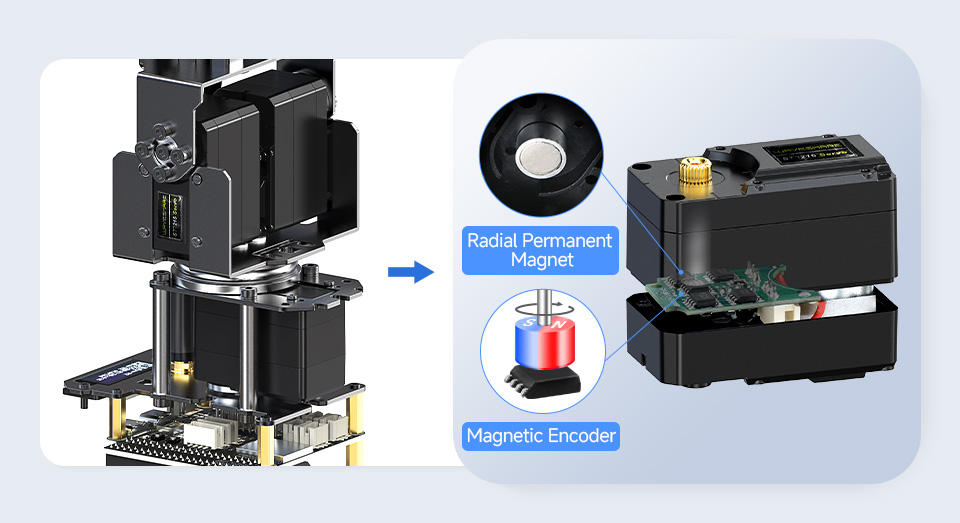
Diseño de accionamiento directo conjunto: Precisión de retroalimentación hasta 0.088°
Logre una retroalimentación de ángulo de articulación altamente precisa directamente mediante un codificador magnético de alta precisión de 12 bits, sin grupos reductores. Esto permite calcular con precisión la posición real del punto objetivo actual basado en la retroalimentación.
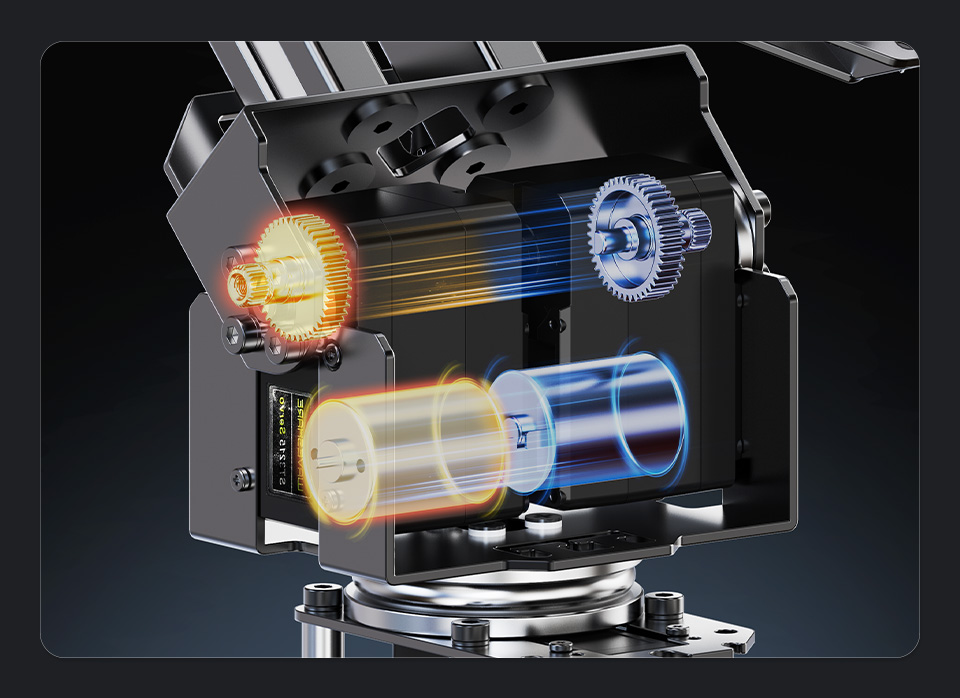
Tecnología innovadora de doble accionamiento duplica el torque de la articulación del hombro
Un algoritmo de control de doble accionamiento especialmente desarrollado permite que dos servos en la articulación del hombro coordinen eficazmente su torque de salida, mejorando significativamente la potencia y la capacidad de carga total de la serie RoArm-M3.
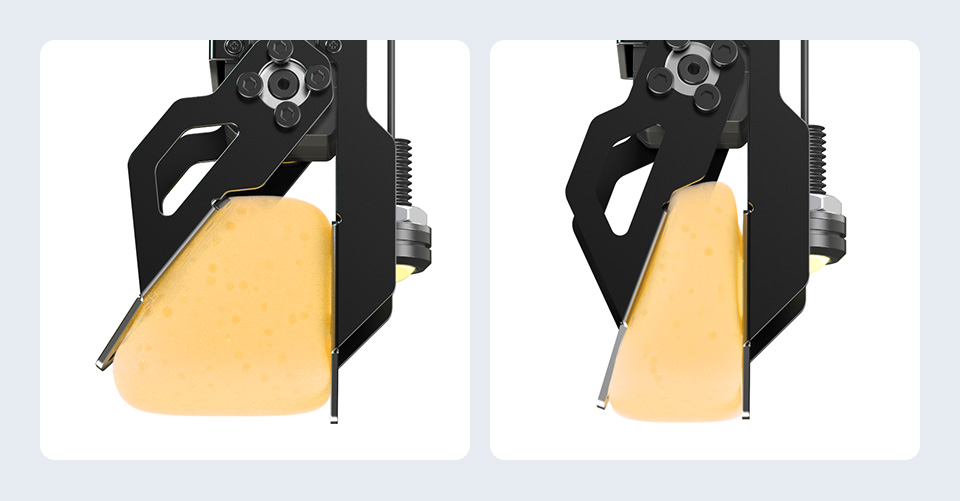
La pinza de accionamiento directo permite un control preciso de la fuerza
El diseño de pinza de accionamiento directo permite un control programático preciso de la fuerza de sujeción, ideal para manipular objetos delicados sin presión excesiva.
Control adaptativo de fuerza externa dinámica
Active esta función para limitar el torque máximo de cada articulación. Si la fuerza externa supera el umbral de torque configurable, el brazo robótico girará en respuesta, regresando a su posición especificada cuando la fuerza disminuya.

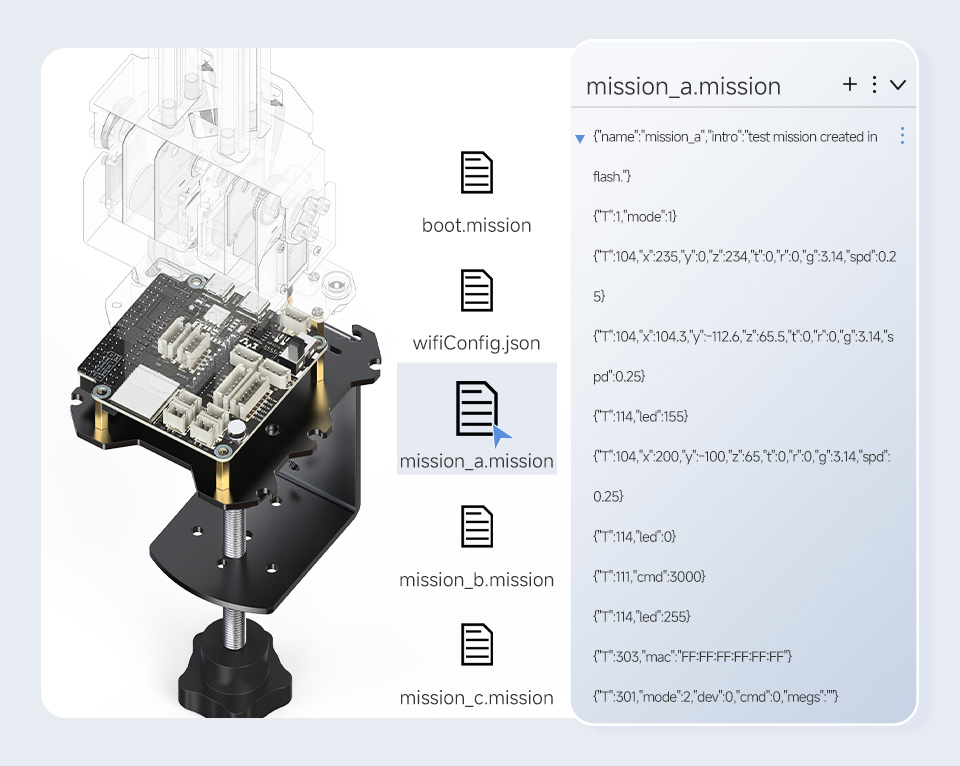
Grabación automática con un clic: fácil creación de acciones
El RoArm-M3 puede guardar instrucciones JSON para el control del robot como archivos de tareas directamente en la memoria Flash del ESP32, asegurando la retención de datos incluso sin energía. Estos archivos de tareas permiten que el brazo robótico realice operaciones complejas y repetitivas.
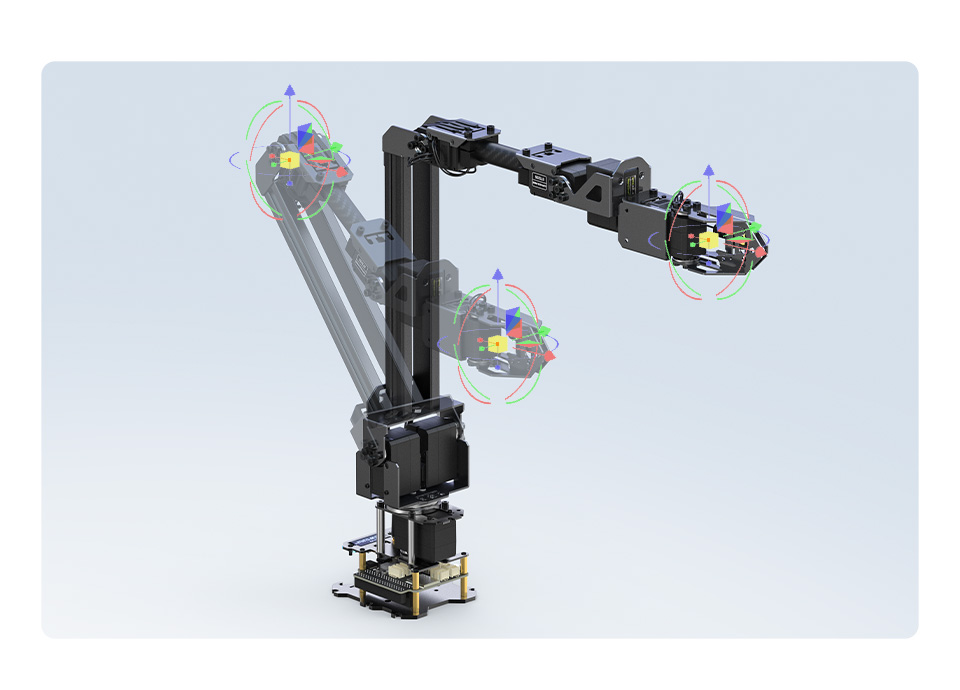
Alcance con precisión el objetivo ingresando coordenadas
Utilice el algoritmo de control de cinemática inversa de código abierto en el sistema de coordenadas cartesianas tridimensional. Al ingresar la posición objetivo, el brazo robótico alcanza con precisión el punto calculando el ángulo de rotación de cada articulación.
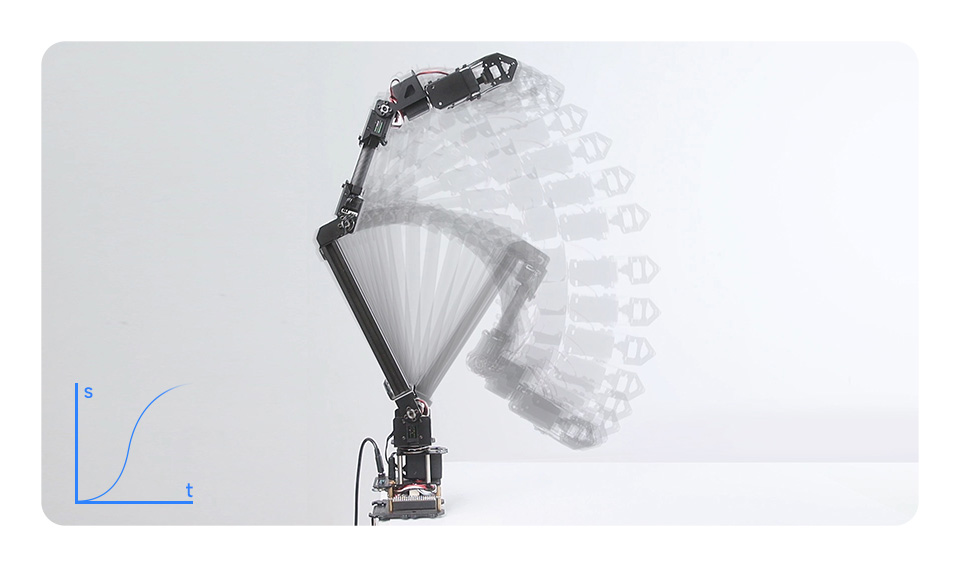
Control de velocidad curva para un movimiento más suave
El algoritmo de control de velocidad curva asegura un movimiento más suave y natural del brazo robótico, eliminando oscilaciones durante las fases de inicio y parada.
Control inalámbrico ESP-NOW: colaboración remota de baja latencia
ESP-NOW es un protocolo de comunicación inalámbrica ad hoc de baja latencia que funciona sin infraestructura de red. Controle múltiples brazos robóticos inalámbricamente con métodos de control por difusión, grupo o uno a uno.
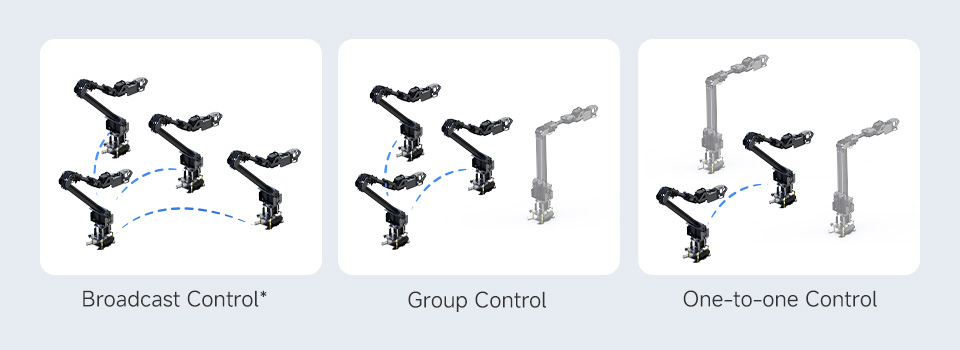
* Nota: El control por difusión no tiene limitaciones de dispositivos, mientras que el control en grupo soporta hasta 20 dispositivos. Consulte el WIKI para más detalles.
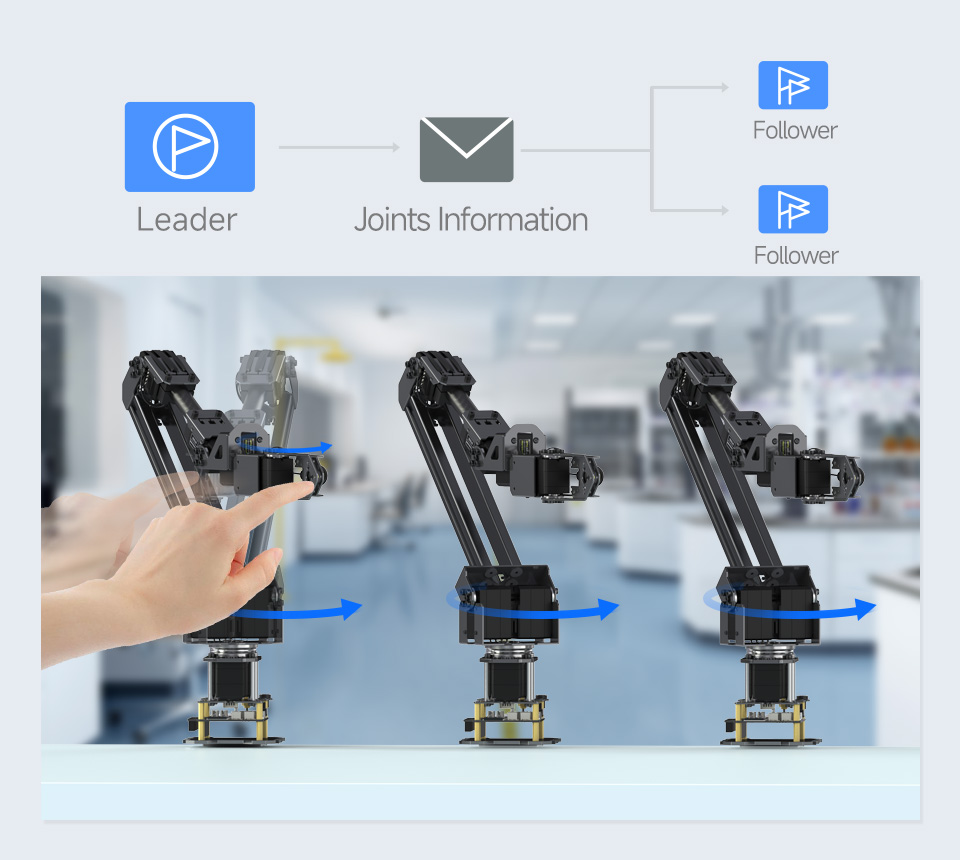
Compatible con modo de control líder-seguidor basado en ESP-NOW
En el modo de control líder-seguidor, el brazo robótico líder transmite su información de ángulo de articulación vía ESP-NOW. Los brazos seguidores imitan estas acciones con precisión en tiempo real.
Múltiples interfaces de control, soporte para múltiples dispositivos e idiomas
Más allá de la aplicación WEB, la serie RoArm-M3 puede controlarse mediante solicitudes de red con protocolo HTTP, comunicación serial o comunicación USB, enviando comandos JSON y recibiendo retroalimentación de varios controladores.
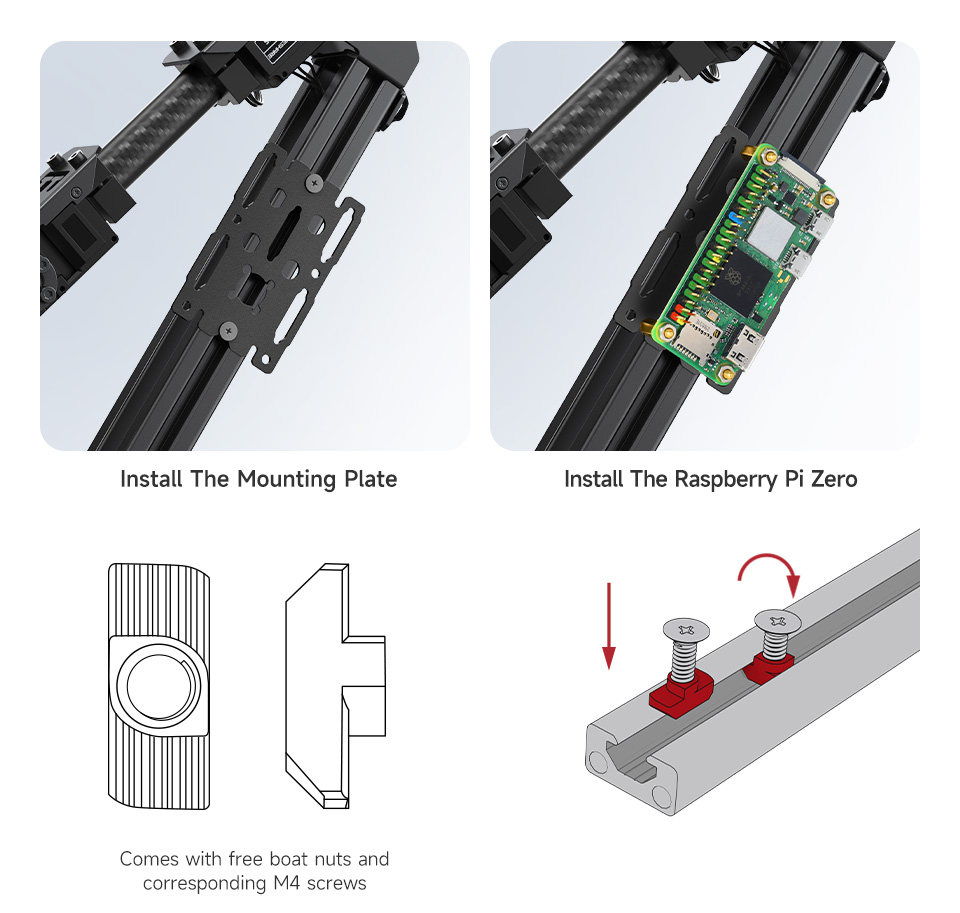
Múltiples métodos de instalación para integrar en su aplicación
Se proporcionan varios esquemas de instalación y recursos para desarrollo secundario, permitiendo una integración flexible en diversos proyectos y aplicaciones.

Fácil de instalar diferentes periféricos
La estructura principal del brazo superior cuenta con dos rieles de aluminio estándar europeo 1020, que permiten la fácil instalación de periféricos adicionales con tuercas tipo barco y tornillos M4 para satisfacer necesidades específicas.
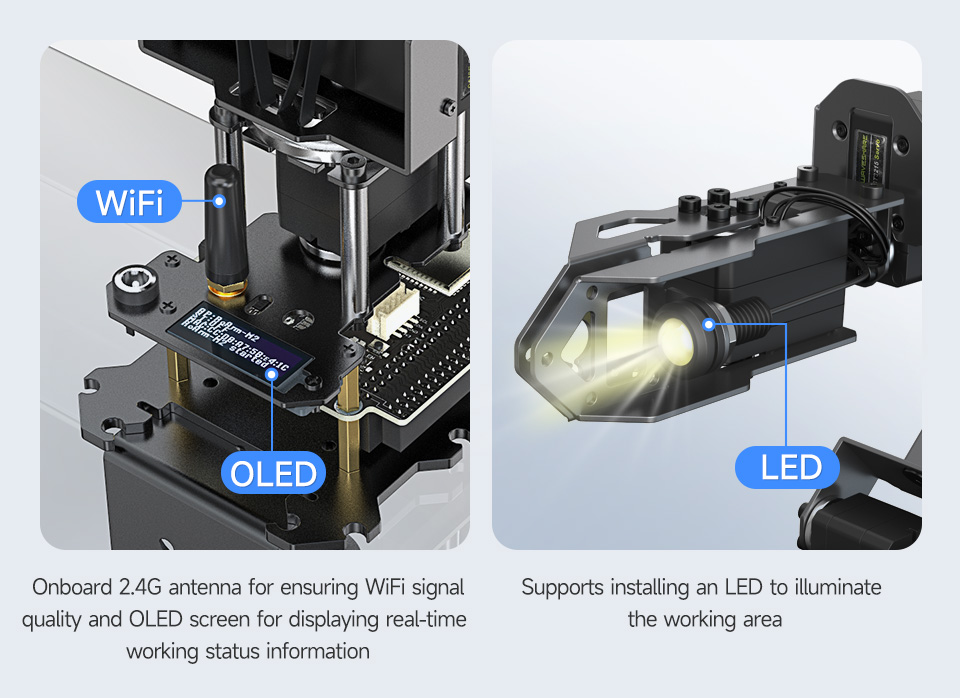
Compatible con la instalación de una cámara para ampliar aplicaciones visuales
Incluye un soporte para cámara y dibujos de código abierto. Instale directamente una cámara compatible o adapte otras para aplicaciones visuales avanzadas.
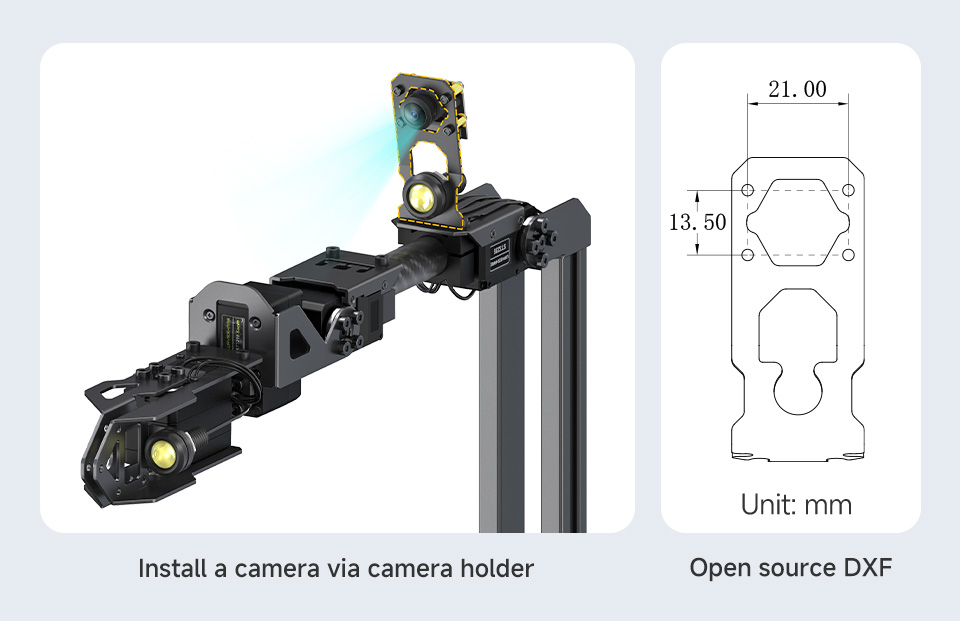
* solo para referencia, solo se incluye la luz LED.
Placa de control principal ESP32 a bordo
Cuenta con un potente MCU de control principal ESP32 que soporta múltiples protocolos de comunicación inalámbrica, con abundantes recursos de código abierto para facilitar el desarrollo secundario de aplicaciones innovadoras.
Compatible con ROS2: Proporciona archivo de establecimiento de modelo y soporta cooperación multi-dispositivo
Ofrece nodos de comunicación ROS2, un archivo de descripción de modelo URDF y un tutorial ROS2 amigable para principiantes.
Ricos recursos tutoriales para desarrollo secundario
Se proporcionan tutoriales y casos completos que cubren diversas funciones y escenarios comunes de aplicación para ayudar a los usuarios a dominar rápidamente el desarrollo secundario.
Placa controladora general para robots
La placa controladora a bordo cuenta con interfaces y recursos ricos para desarrollo innovador y expansión funcional.
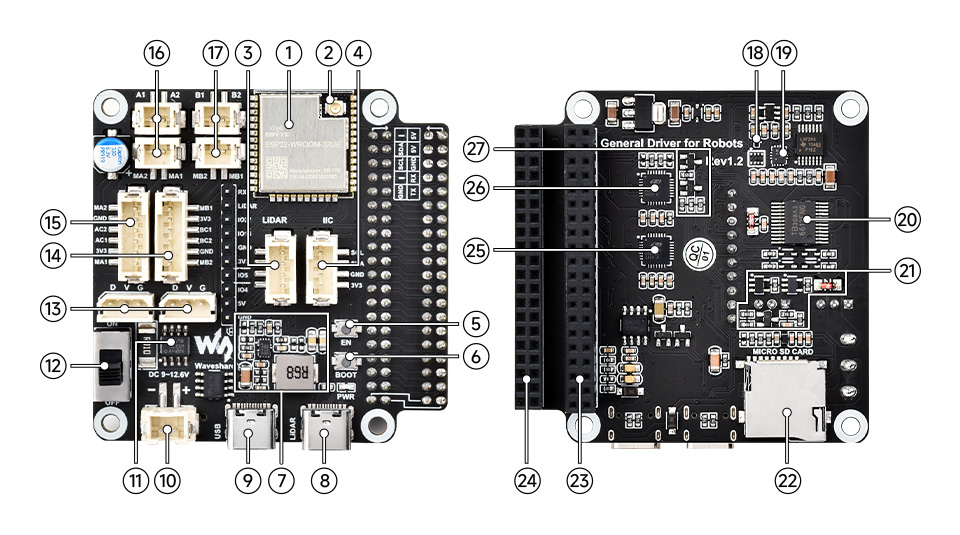
- Módulo controlador ESP32-WROOM-32: Puede desarrollarse usando Arduino IDE.
- Conector WIFI IPEX 1: Para conectar antena WIFI y aumentar la distancia de comunicación inalámbrica.
- Interfaz LIDAR: Función integrada de adaptador LIDAR.
- Interfaz de expansión periférica I2C: Para conectar con pantalla OLED u otros sensores I2C.
- Botón de reinicio: Presione y suelte para reiniciar el ESP32.
- Botón de descarga: Presione al encender para entrar en modo de descarga.
- Circuito regulador de voltaje DC-DC 5V: Proporciona alimentación para computadoras host como Raspberry Pi o Jetson Nano.
- Puerto Type-C (LADAR): Transmisión de datos LIDAR.
- Puerto Type-C (USB): Interfaz de comunicación ESP32, para cargar programas al ESP32.
- Puerto de alimentación XH2.54: Soporta entrada DC 7~13V, puede alimentar directamente servos y motores por bus serial.
- INA219: Chip de monitoreo de voltaje/corriente.
- Encendido/Apagado: Encendido/Apagado de fuente de alimentación externa.
- Interfaz de servo por bus serial serie ST: Para conectar con servo por bus serial ST3215 / ST3235.
- Interfaz de motor PH2.0 6P: Interfaz del grupo B para motor con codificador.
- Interfaz de motor PH2.0 6P: Interfaz del grupo A para motor con codificador.
- Interfaz de motor PH2.0 2P: Interfaz del grupo A para motor sin codificador.
- Interfaz de motor PH2.0 2P: Interfaz del grupo B para motor sin codificador.
- AK09918C: Brújula electrónica de 3 ejes.
- QMI8658C: Sensor de movimiento de 6 ejes.
- TB6612FNG: Chip de control de motor.
- Circuito de control de servos por bus serial: Para controlar múltiples servos ST3215 por bus serial y obtener retroalimentación de los servos.
- Ranura para tarjeta TF: Puede usarse para almacenar registros o configuraciones WIFI.
- Conector GPIO de 40 pines: Para conectar con Raspberry Pi u otras placas anfitrionas.
- Conector extendido de 40 pines: Fácil uso de los pines GPIO de Raspberry Pi u otras placas anfitrionas.
- CP-2102: UART a USB, para transmisión de datos LIDAR.
- CP-2102: UART a USB, para comunicación con ESP32.
- Circuito de descarga automática: Para cargar programas al ESP32 sin presionar los botones EN y BOOT.
Recursos a bordo diversificados apoyan la expansión de funciones
Integrado con monitoreo de voltaje de batería INA219 y sensor IMU de 9 ejes, permitiendo una amplia expansión de funciones e innovación.

Interacción de arrastrar y soltar con ratón
Utilice aplicaciones web y software de escritorio (programas Python de código abierto) para establecer instrucciones de acción con pulsaciones y liberaciones del ratón, proporcionando un control flexible sobre el brazo robótico.

Especificaciones
| Característica | Detalle |
|---|---|
| GDL | 5 + 1 |
| Espacio de trabajo | Diámetro horizontal: 1120mm (máx., omnidireccional 360°), Vertical: 798mm (máx.) |
| Voltaje de funcionamiento | Fuente de alimentación 12V 5A, compatible con baterías de litio 3S (NO incluidas) |
| Capacidad de carga | 0.2kg@0.5m |
| Precisión de reposicionamiento | ~ 5mm |
| Velocidad de rotación del servo | 40rpm (sin carga, sin límite de torque) |
| Rango de operación | BASE-360°, HOMBRO-180°, CODO-225°, MANO-135°/270° |
| Tipo de accionamiento | Servo de bus en serie TTL, articulación de accionamiento directo |
| Número de servos | 7 |
| Sensor de ángulo de la articulación | Codificador magnético de 12 bits y 360° |
| Torque del servo | 30KG.CM @12V, 20KG·CM @ 12V (EoAT) |
| Información de retroalimentación de la articulación | estado del servo, ángulo de la articulación, velocidad de rotación, carga de la articulación, voltaje del servo, corriente del servo, temperatura del servo y modo de trabajo del servo |
| Control principal | ESP32-WROOM-32 |
| Características del módulo de control principal | WiFi, BT, Doble núcleo, 240MHz |
| Modo de control inalámbrico | 2.4G-WiFi, ESP-NOW |
| Modo de control por cable | USB, UART |
| Modo de operación manual | Interfaz de control WEB |
| Modo de operación del host | Comandos UART / USB / WEB en formato de datos JSON |
| Soporte de host | Dispositivos de conexión USB como Raspberry Pi, Jetson Orin Nano y PC. |
| Función EoAT | Función de abrazadera por defecto, puede cambiarse como un grado adicional de libertad |
| Potencia LED | ≤1.5W |
| Tamaño de pantalla OLED | 0.91inch |
| Otras funciones | Interruptor de fuente de alimentación de 2 canales de 12V, IMU de 9 DOF |
| Peso del brazo robótico | RoArm-M3-S: 973.5±15g RoArm-M3-Pro: 1020.8g±15g (No incluye el peso de la abrazadera de fijación del borde de la mesa) |
| Peso de la abrazadera de fijación del borde de la mesa | 290±10g |
| Espesor del borde de la mesa soportado por la abrazadera | 72mm |
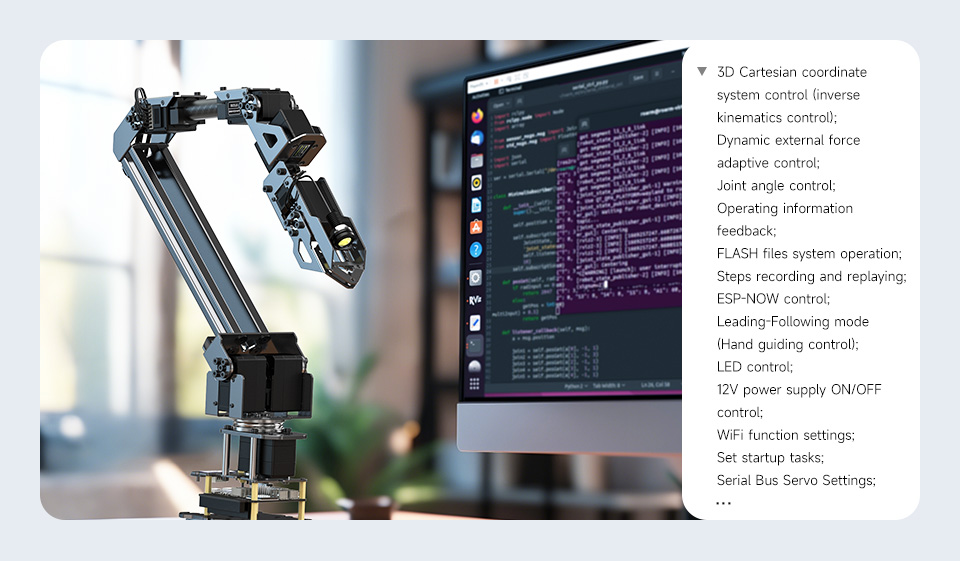
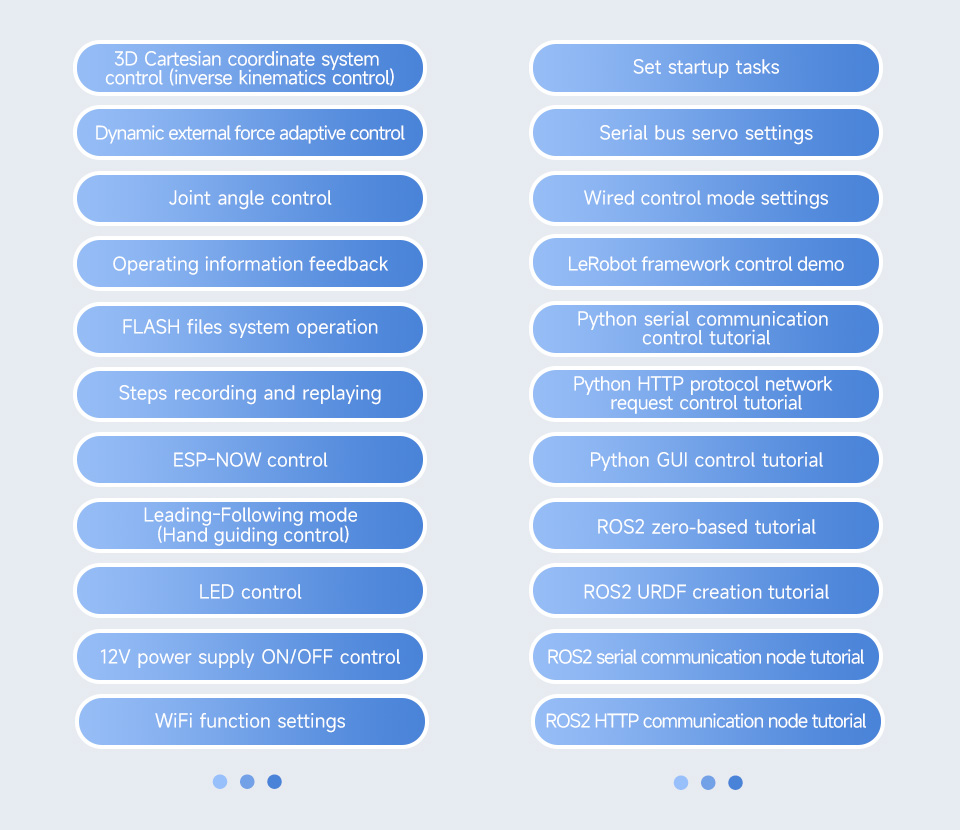
| Demostración | Control del sistema de coordenadas cartesianas 3D (control de cinemática inversa); Control adaptativo de fuerza externa dinámica; Control del ángulo de las articulaciones; Retroalimentación de información operativa; Operación del sistema de archivos FLASH; Grabación y reproducción de pasos; Control ESP-NOW; Modo líder-seguidor (control guiado a mano); Control LED; Control de encendido/apagado de fuente de alimentación de 12V; Configuración de funciones WiFi; Establecer tareas de inicio; Configuración del servo de bus en serie; Configuración del modo de retroalimentación, etc. (Nota: Por favor consulte el WIKI para más detalles) |
Exhibición de Producto y Empaque

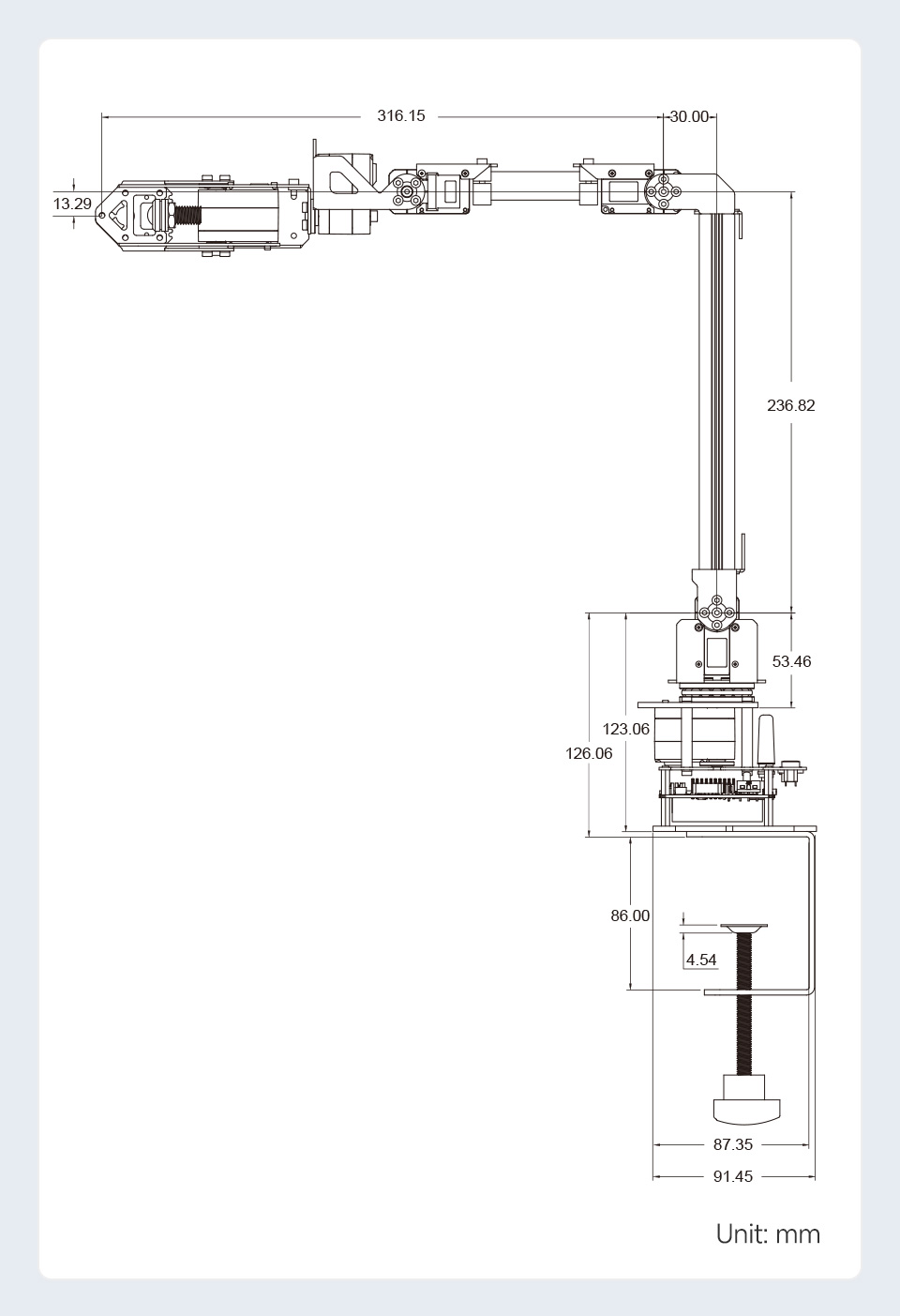
Dimensiones
1. Información general de envío
- Ofrecemos métodos de envío premium con un número de seguimiento para cada pedido.
- Las direcciones de envío deben ingresarse en inglés sin símbolos especiales para ayudar a la empresa de mensajería a reconocer su dirección en el sistema. Enviaremos estrictamente según la dirección de envío que usted proporcionó. Por favor, notifíquenos cualquier cambio de dirección antes de que su pedido sea marcado como "Enviado" para evitar la pérdida del paquete.
- Por favor, contacte a nuestro personal de servicio al cliente inmediatamente si necesita cancelar o cambiar un pedido. Una vez que su pedido haya alcanzado el estado "Enviado", ya no podrá ser cancelado ni modificado de ninguna manera. Para evitar complicaciones, revise su carrito de compras antes de finalizar la compra.
- Podemos enviar todos los pedidos en stock dentro de 1 día hábil después de que su pedido haya sido confirmado.
- Todos los artículos son inspeccionados antes del envío y cuidadosamente empaquetados a mano.
- Con la práctica estándar de mensajería, debe revisar el contenido del paquete antes de firmar la recepción de sus productos. De lo contrario, no nos haremos responsables de cualquier daño que pueda haber ocurrido durante el transporte.
🚀 ¿Necesita envío más rápido?
Si necesita envío urgente (Exprés), por favor contacte a nuestro equipo de atención al cliente en info@openelab.io para una cotización personalizada adaptada a su ubicación.
2. Tarifas y opciones de envío
Nuestras tarifas de envío se calculan según el valor del pedido y el destino. Por favor, consulte las tablas a continuación para más detalles.
2.1 Alemania (Nacional)
| Método de Envío | Valor del Pedido | Costo | Entrega estimada |
|---|---|---|---|
| Deutsche Post | €0 - €50.00 | €4.95 | 2-4 Días laborables |
| Deutsche Post | Más de 50,00 € | Gratis | 2-4 Días laborables |
|
Paquete DHL (Entrega más rápida) |
€0 - €50.00 | €6.95 | 1-3 Días laborables |
|
Paquete DHL (Entrega más rápida) |
€50.00 - €100.00 | €2.00 | 1-3 Días laborables |
|
Paquete DHL (Entrega más rápida) |
Más de 100,00 € | Gratis | 1-3 Días laborables |
2.2 Unión Europea (UE)*
*Incluyendo:
| Método de Envío | Valor del Pedido | Costo | Entrega estimada |
|---|---|---|---|
| Deutsche Post | €0 - €100.00 | €7.95 | 5-9 días hábiles |
| Deutsche Post | Más de 100,00 € | Gratis | 5-9 días hábiles |
|
Paquete DHL (Entrega más rápida) |
€0 - €100.00 | €15.95 | 3-7 Días Hábiles |
|
Paquete DHL (Entrega más rápida) |
€100.00 - €250.00 | €7.95 | 3-7 Días Hábiles |
|
Paquete DHL (Entrega más rápida) |
Más de 250,00 € | Gratis | 3-7 Días Hábiles |
2.3 Estados Unidos
| Región | Método de Envío | Valor del Pedido | Costo | Entrega estimada |
|---|---|---|---|---|
|
EE.UU. Continental (50 Estados) |
USPS Ground Advantage | €0 - €45.00 | €5.95 | 3-7 Días Hábiles |
| USPS Ground Advantage | Más de €45.00 | Gratis | 3-7 Días Hábiles | |
| Correo Prioritario USPS | €0 - €45.00 | €16.95 | 1-4 Días Hábiles | |
| Correo Prioritario USPS | Más de €45.00 | €14.95 | 1-4 Días Hábiles | |
|
EE.UU. No Continental (AK, HI, PR, etc.) |
USPS Ground Advantage | €0 - €60.00 | €6.95 | 5-9 días hábiles |
| USPS Ground Advantage | Más de €60.00 | Gratis | 5-9 días hábiles |
* Las regiones en los EE.UU. No Continentales incluyen: Alaska, Samoa Americana, Guam, Hawái, Islas Marshall, Islas Marianas del Norte, Palaos, Puerto Rico, Islas Vírgenes de EE.UU. y todas las direcciones de las Fuerzas Armadas de EE.UU. El envío y la entrega a estas áreas están sujetos a las reglas de envío de EE.UU. No Continentales.
2.4 Internacional (Fuera de la UE)
Para destinos internacionales específicos, incluyendo Suiza, Reino Unido y Noruega.
| Monto del Pedido | Costo de envío |
|---|---|
| €0 - €300.00 | €19.95 |
| Más de €300.00 | Gratis |
Aviso Importante:
- Estado de Inventario: Por favor, verifica el estado del inventario en la página del producto. Nuestro sistema muestra el stock en tiempo real para nuestros almacenes de Múnich y Long Beach. Si un artículo está agotado en estas ubicaciones, se marcará como "Pre-pedido". Aún puedes realizar un pedido para estos artículos.
- Cumplimiento de Pre-pedido: Para los artículos de "Pre-pedido", organizamos la solución logística más eficiente para asegurarnos de que recibas tus productos lo antes posible. Tu paquete puede ser enviado directamente desde nuestro almacén de Shenzhen. Alternativamente, como parte de nuestro proceso estándar de reposición, podemos transportar los productos primero a nuestro almacén de Múnich o Long Beach (normalmente tomando 5-10 días hábiles) antes de despacharlos a ti.
- Envíos Divididos: Si tu pedido contiene artículos en stock y de Pre-pedido, daremos prioridad al envío inmediato de los artículos en stock desde el almacén local. Los artículos de Pre-pedido restantes se enviarán en un envío separado una vez que estén listos.
3. Almacén Internacional
Nuestros productos se almacenan en nuestros almacenes de Múnich, Long Beach y Shenzhen para ofrecer soluciones logísticas más flexibles adaptadas a diferentes regiones y necesidades de los clientes. En la página de descripción de cada producto, indicamos la ubicación específica del almacén para ayudarte a planificar mejor tu compra y el calendario de entrega.
3.1 Almacén en Alemania
Para productos almacenados en nuestro almacén en Múnich, utilizamos Deutsche Post o DHL para el envío, dependiendo del tamaño del paquete. La logística dentro de Alemania es muy eficiente, con un tiempo estimado de entrega de 2-4 días hábiles, asegurando que reciba su pedido rápida y cómodamente. Para países del oeste de la UE, el tiempo estimado de entrega es de 4-6 días hábiles. Para países del este de la UE, el tiempo estimado de entrega es de 6-8 días hábiles.
3.2 Almacén en EE. UU.
Para productos almacenados en nuestro almacén en Long Beach, utilizamos USPS o UPS para el envío, dependiendo del tamaño del paquete. La logística dentro de EE. UU. es muy eficiente, con un tiempo estimado de entrega de 3-7 días hábiles, asegurando que reciba su pedido rápida y cómodamente.
3.3 Almacén en China
Para artículos en preventa o pedidos cumplidos directamente desde nuestro almacén en Shenzhen, utilizamos YunExpress para un envío internacional confiable. Dadas las complejidades del envío internacional, el tiempo estimado de entrega para estos paquetes es de alrededor de 10 días hábiles, aunque puede variar ligeramente debido a procesos aduaneros u otros factores fuera de nuestro control. De lo contrario, los productos serán reabastecidos en nuestros almacenes de Múnich o EE. UU. antes de la entrega final, como se detalla en el "Aviso importante" arriba.
4. Aduanas e impuestos
4.1 ¿Cómo maneja OpenELAB las aduanas para importación o exportación?
Para los Estados miembros de la UE: Ya sea enviado desde Alemania o China, cubrimos todos los derechos e impuestos de importación (DDP), asegurando que reciba su paquete sin costos adicionales ni complicaciones con la aduana.
Para países fuera de la Unión Europea, como Suiza y Noruega, puede estar sujeto a derechos de importación, impuestos y/o tarifas aduaneras cobradas en la entrega. Estas tarifas varían de un país a otro y son responsabilidad exclusiva del destinatario.
⚠️ Rechazo de la entrega: Si se niega a pagar estas tarifas al momento de la entrega y el paquete nos es devuelto, el importe del reembolso se calculará después de deducir los costos originales de envío, los costos de envío de devolución y cualquier tarifa aduanera o de almacenamiento aplicable.
4.2 ¿Cómo se cobra el IVA cuando el Cliente realiza un pedido en OpenELAB?
De acuerdo con las nuevas reglas de IVA para comercio electrónico en la UE, OpenELAB tendrá el derecho de cobrar el importe del IVA en el momento del pago. La tasa estándar del IVA aplicado está sujeta a las regulaciones del país de destino. No se cobrará IVA adicional en la entrega de estos pedidos.



