



















































































































Kit de brazo robótico de escritorio RoArm-M2 con servo de bus en serie de alto torque Waveshare
Pre-order
¡Envío gratis desde 30€ en Alemania, 50€ en la UE!
- Los pedidos anticipados se enviarán en 5 días laborables.
- Tiempo de entrega para países de la UE y EE. UU.: 10 días laborables.
- Tiempo de entrega para otros países: 15 días laborables.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Kit de brazo robótico de escritorio RoArm-M2 con servo de bus en serie de alto torque Waveshare
RoArm-M2
Brazo Robótico Servo de Bus en Serie de Alto Torque y 4-DOF
Soporta expansión flexible y desarrollo secundario

Características de un vistazo
La serie RoArm-M2 es un brazo robótico inteligente de 4DOF diseñado para aplicaciones innovadoras. Adopta un diseño estructural ligero con un peso total de menos de 900g y una carga útil efectiva de [email protected], puede montarse de forma flexible en varias plataformas móviles. Adopta una base omnidireccional de 360° combinada con tres articulaciones flexibles para crear un espacio de trabajo con un diámetro de 1 metro.
El diseño de accionamiento directo en la articulación mejora la precisión de reposicionamiento y también aumenta la fiabilidad estructural, con tecnología innovadora de doble accionamiento que duplica el torque de la articulación del hombro. El módulo de control principal MCU ESP32 a bordo soporta múltiples modos de control inalámbrico, proporciona interfaces de control y protocolos de comunicación ricos para conectar fácilmente con varios dispositivos.
Proporciona una aplicación WEB fácil de usar y multiplataforma que integra un modo de control de coordenadas simple y visual, facilitando el inicio. Viene con tutoriales gráficos y en video ricos para ayudarte a aprender y usarlo rápidamente. Compatible con ROS2 y varios ordenadores anfitriones, soporta diversos modos de comunicación inalámbrica y por cable. Incluye una placa de expansión, soporta la personalización del EoAT (End of Arm Tooling) para cumplir con los requisitos innovadores de aplicación.
La serie RoArm-M2 logra un excelente equilibrio entre ligereza, facilidad de uso, expandibilidad e innovación abierta, es un brazo robótico multifuncional que integra control inteligente, interacción hombre-máquina y desarrollo personalizable. Ideal para aplicaciones que requieren una combinación de flexibilidad, expandibilidad y facilidad de uso.
Opciones de versión
Ofrece opciones para RoArm-M2-S / RoArm-M2-Pro. La versión mejorada RoArm-M2-Pro está equipada con servos de bus ST3235 totalmente metálicos, ofreciendo un cuerpo más robusto y un juego estable que no aumenta con el uso, mejorando la durabilidad del producto.

Comparación de parámetros
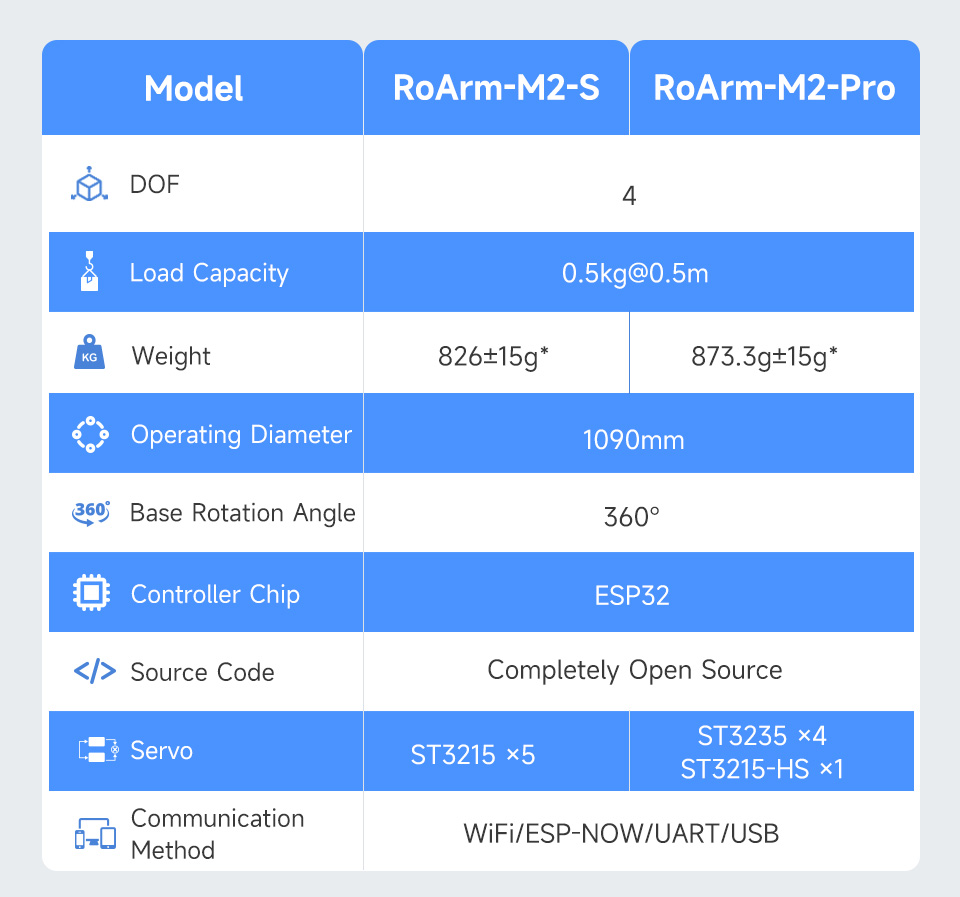
* No incluye el peso de la abrazadera de fijación al borde de la mesa (290g).
Múltiples métodos de montaje del EoAT
El EoAT soporta varios métodos de montaje, puede usarse como una pinza o como el cuarto grado de libertad. Proporciona modelos DXF y 3D de código abierto para bricolaje y desarrollo secundario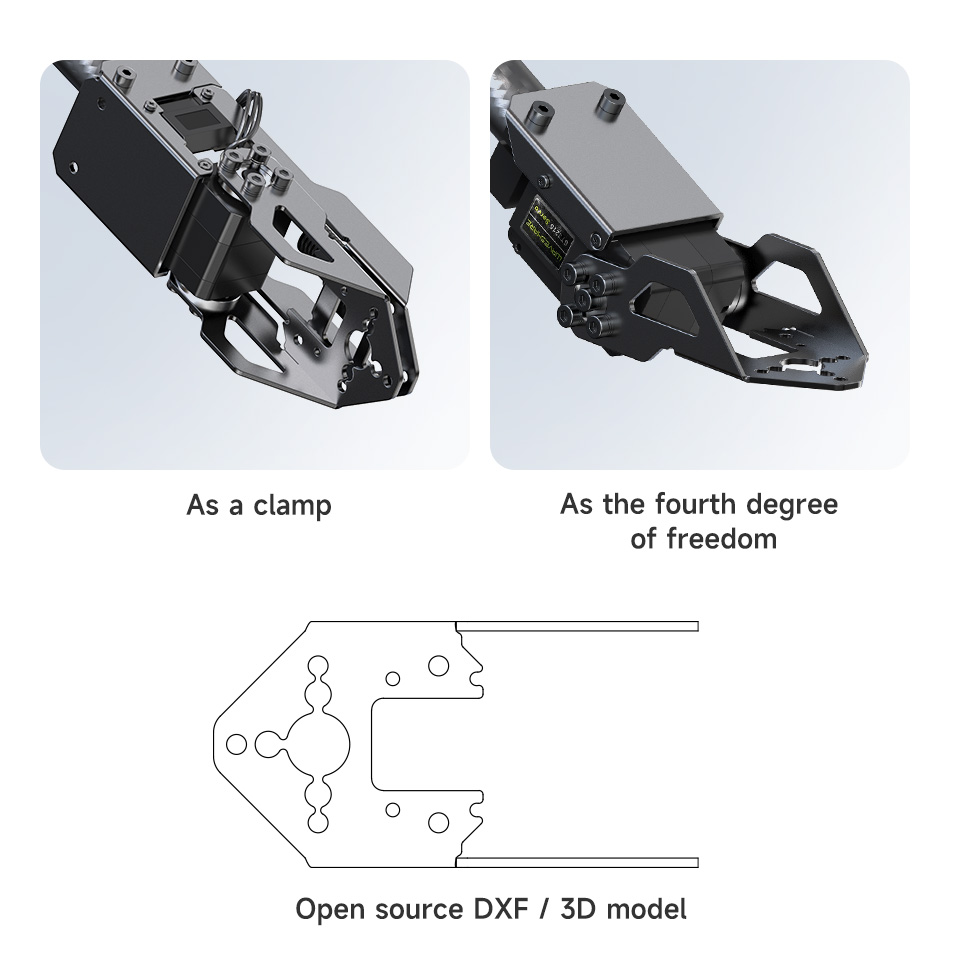
Articulaciones flexibles × espacio omnidireccional
Adopta base de rotación de 360° y articulaciones flexibles para crear un espacio operativo omnidireccional con un diámetro de 1 metro, permitiendo que el EoAT se mueva libremente en todas las direcciones
Fácil de controlar vía
Aplicación Web multiplataforma
No se requiere instalación de App, acceso tras ingresar la dirección. Permite a los usuarios conectar y controlar RoArm-M2 mediante teléfonos móviles, tabletas y computadoras haciendo clic en los botones de la Web App. Soporta desarrollo secundario de esta Web App de código abierto para personalizar la interfaz de usuario y agregar nuevas funciones.
Completamente de código abierto para
desarrollo secundario
Código de control y documentos de interfaz de comunicación completamente de código abierto para la serie Roarm-M2, soporta múltiples idiomas y dispositivos para desarrollo secundario. Proporciona demos y tutoriales modularizados para usuarios desde cero, fácil de comenzar.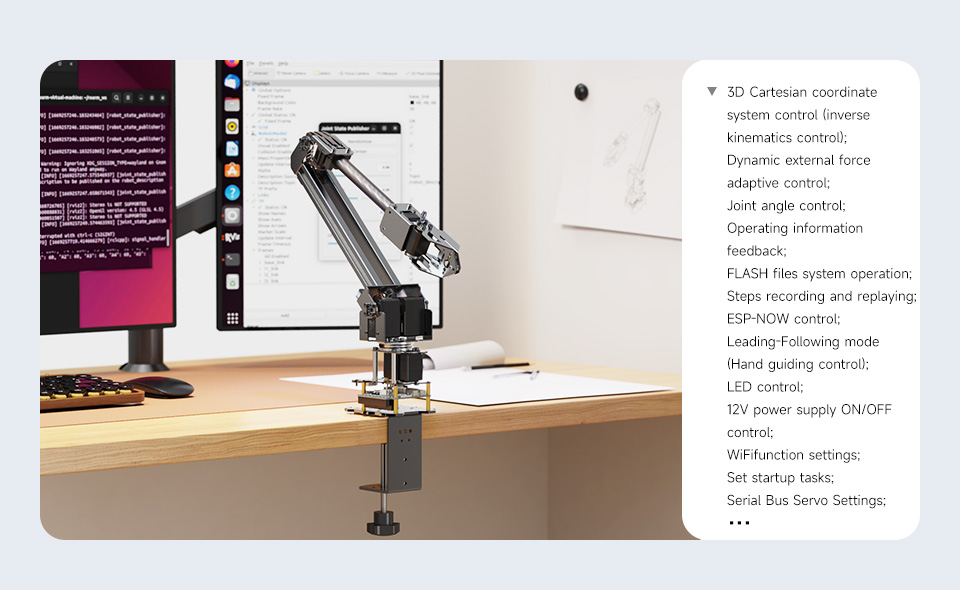
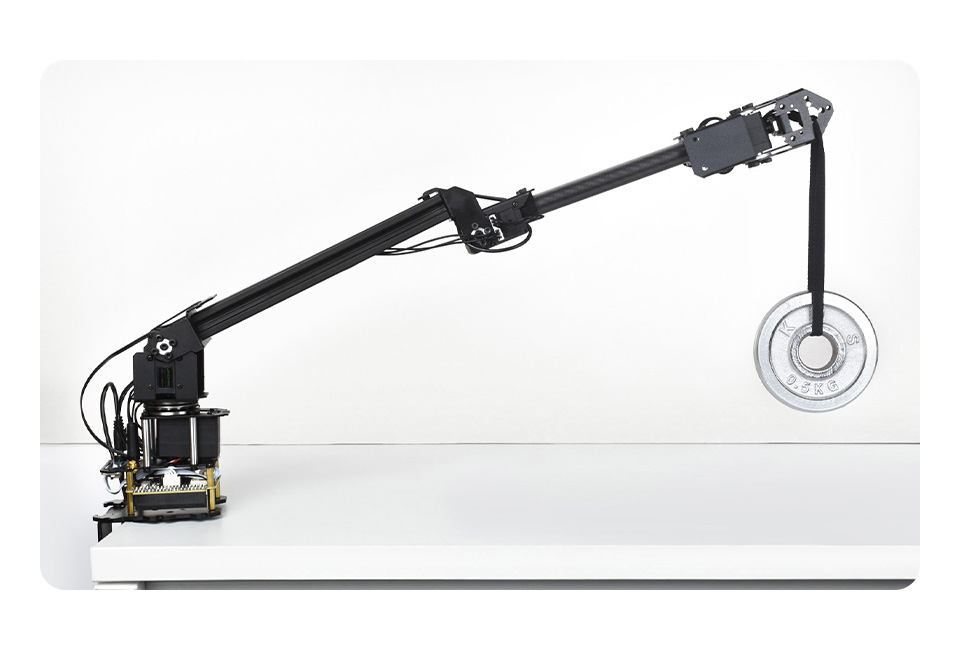
Cuerpo ligero, excelente capacidad de carga
cuerpo ligero con un peso total de menos de 900g, adopta fibra de carbono
y aleación de aluminio 5052 para garantizar la estabilidad bajo cargas pesadas,
adecuado para varios chasis de robots móviles

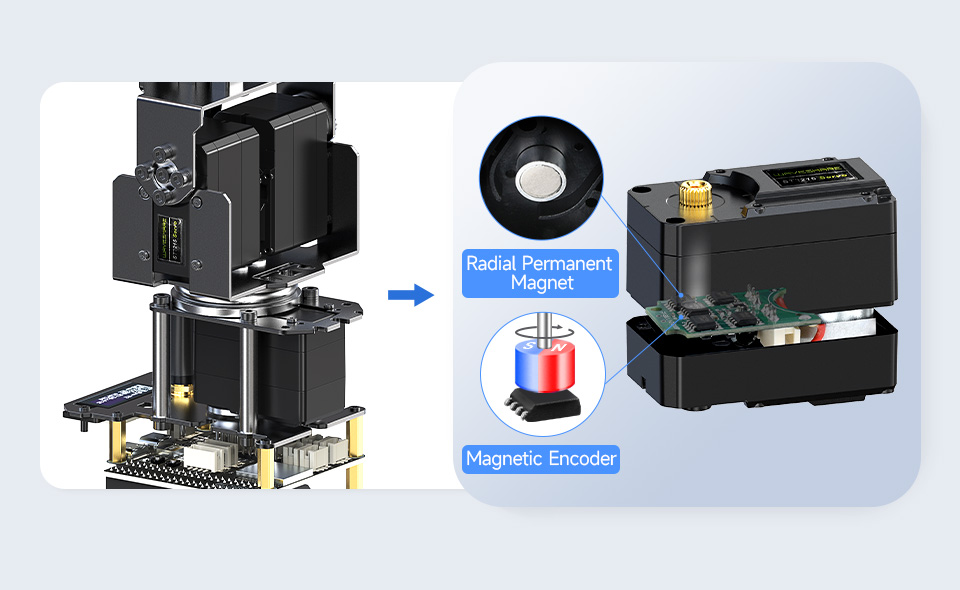
Diseño de accionamiento directo de la articulación
Precisión de retroalimentación de hasta 0.088°
La retroalimentación del ángulo de la articulación se puede obtener directamente mediante un codificador magnético de alta precisión de 12 bits sin ningún grupo de reducción, lo que es más preciso, y la posición real del punto objetivo actual se puede calcular en función de la retroalimentación del ángulo de la articulación.
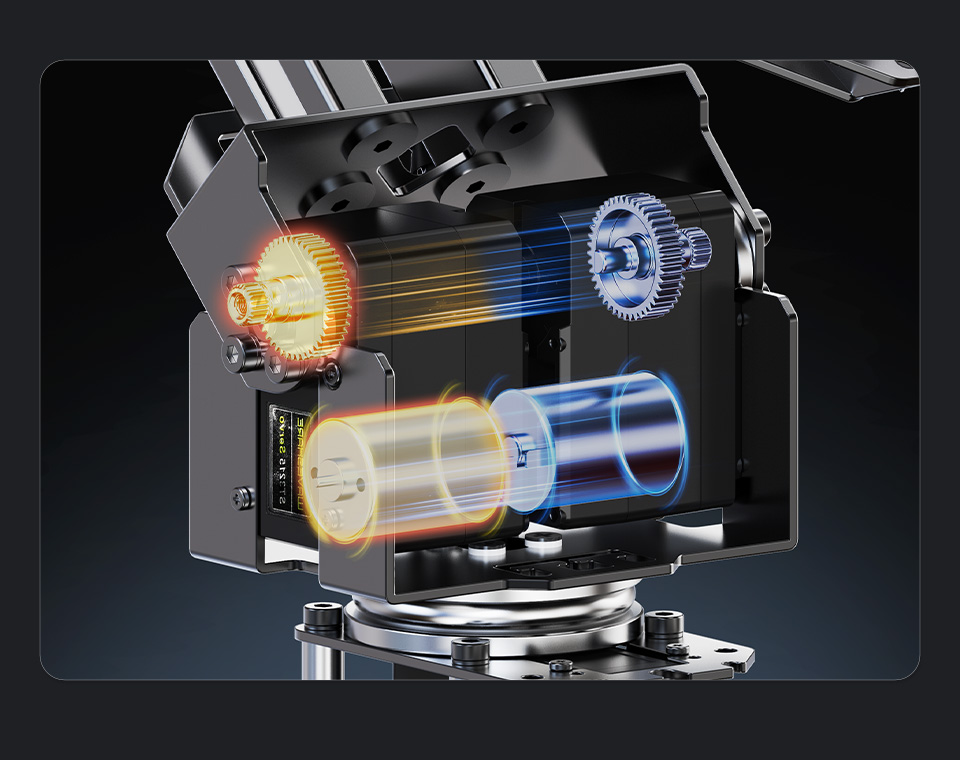
Tecnología innovadora de doble accionamiento
duplica el torque de la articulación del hombro
Hemos desarrollado un algoritmo de control de doble accionamiento que permite que los dos servos en la articulación del hombro coordinen eficazmente su torque de salida, mejorando significativamente
la potencia y la capacidad de carga total de la serie RoArm-M2
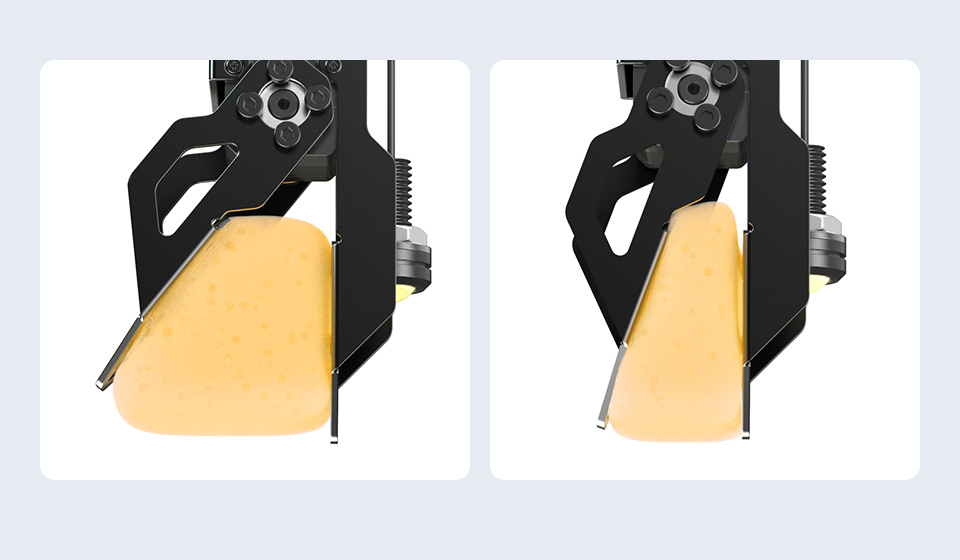
La pinza de accionamiento directo permite precisión
control de fuerza
El diseño de pinza de accionamiento directo permite un control preciso de la fuerza de la pinza en el programa, adecuado para sujetar objetos delicados sin aplicar fuerza excesiva
Soporta la instalación de bandas de goma
para compensar la influencia
de la gravedad
Las articulaciones HOMBRO y CODO soportan la instalación de bandas de goma para asistir al brazo robótico, utilizando la contracción elástica de las bandas de goma para compensar la influencia de la gravedad y aumentar la carga efectiva del brazo robótico.
Fuerza externa dinámica
control adaptativo
Después de habilitar esta función, puede limitar el torque máximo para cada articulación. Cuando la fuerza externa aplicada a la articulación excede el umbral de torque (configurable), el brazo robótico girará en respuesta a la fuerza externa y volverá a la posición especificada cuando la fuerza externa disminuya por debajo del umbral de torque.

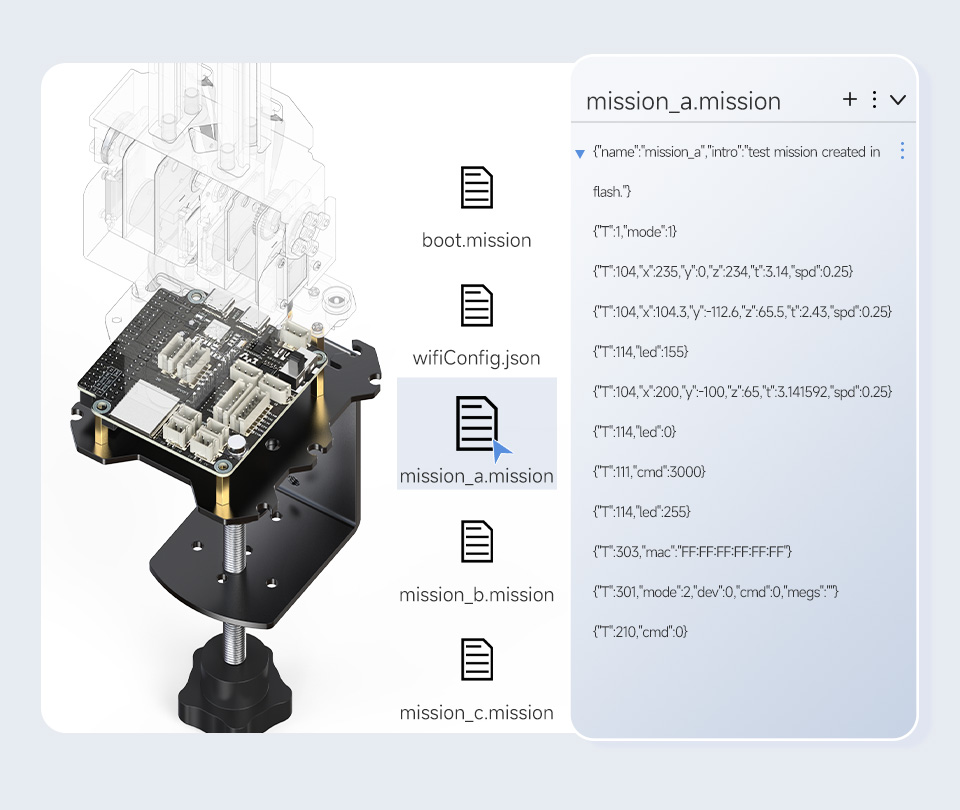
Grabación automática con un clic
Fácil de crear acciones
RoArm-M2 puede guardar instrucciones JSON para el control del robot como archivos de tareas. Los archivos de tareas pueden guardarse en la memoria Flash del ESP32, que no se perderán en caso de corte de energía. El brazo robótico puede realizar operaciones complejas y repetitivas llamando a estos archivos de tareas.
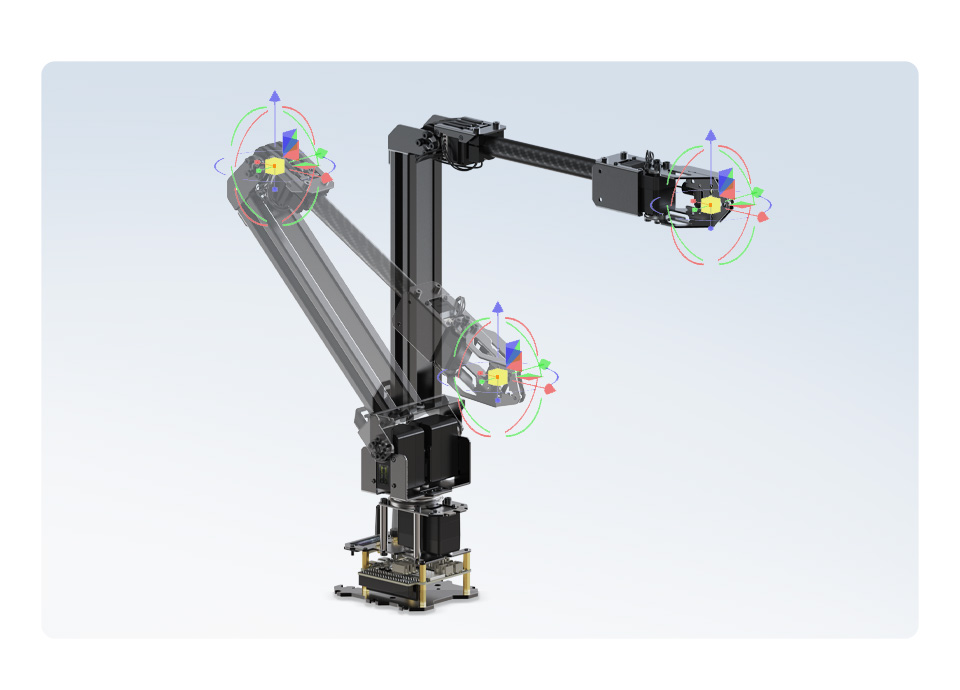
Alcance preciso del objetivo ingresando las coordenadas
Código abierto para el algoritmo de control de cinemática inversa en el sistema de coordenadas cartesianas tridimensional. Después de ingresar la posición objetivo, el brazo robótico puede alcanzar con precisión el punto objetivo utilizando la función de cinemática inversa para calcular el ángulo de rotación de cada articulación.
Control de velocidad de curva para
Movimiento más suave
Usamos el algoritmo de control de velocidad curva para que el brazo robótico se mueva de manera más suave y natural, sin oscilaciones durante el inicio y la parada

Control inalámbrico ESP-NOW
Colaboración remota de baja latencia
ESP-NOW es un protocolo de comunicación inalámbrica ad hoc de baja latencia, sin necesidad de infraestructuras de red. Puede usar un brazo robótico para controlar inalámbricamente otros brazos robóticos, y los métodos de control pueden configurarse como control por difusión, control por grupo y control uno a uno.
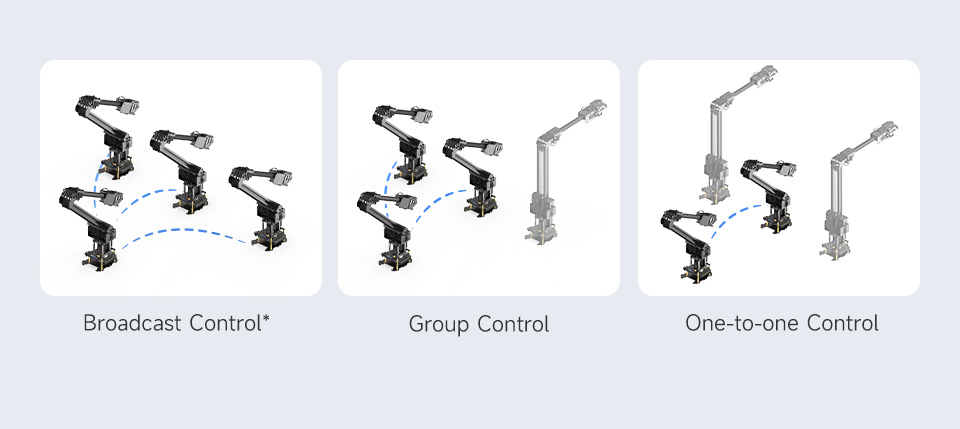
* Nota: El control por difusión no tiene límite en el número de dispositivos controlados, mientras que el control por grupo permite hasta 20 dispositivos. Por favor, consulte el WIKI para más detalles.
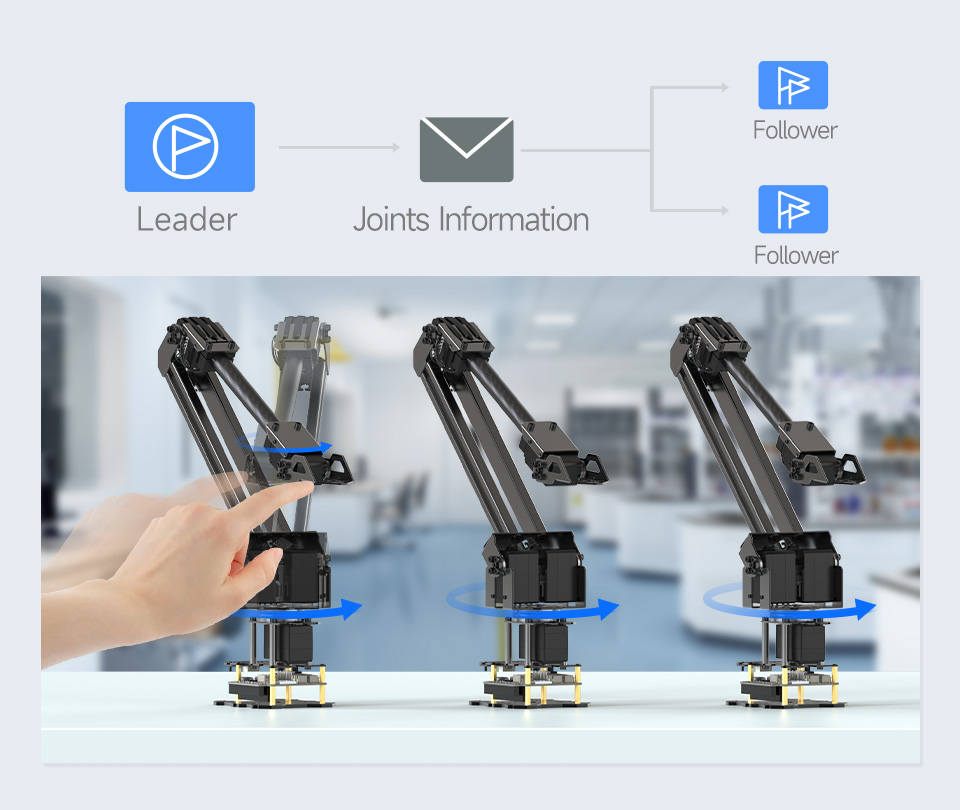
Soporta modo de control líder-seguidor basado en ESP-NOW
En el modo de control líder-seguidor, el brazo robótico líder enviará su información de ángulo de articulación a otros brazos robóticos mediante comunicación ESP-NOW. Los otros brazos robóticos que estén en modo seguidor ESP-NOW imitarán las mismas acciones que el líder en tiempo real.
Múltiples interfaces de control,
Soporte para múltiples dispositivos y idiomas
La serie RoArm-M2 puede ser controlada no solo por la aplicación WEB, sino que también soporta el uso de otros controladores para enviar comandos JSON vía solicitud de red con protocolo HTTP, comunicación serial o comunicación USB para controlar y obtener retroalimentación.
Múltiples métodos de instalación para integrar en su aplicación
Proporciona múltiples esquemas de instalación y recursos relacionados para desarrollo secundario, adecuado para diferentes escenarios de uso y puede integrarse de forma flexible en sus proyectos y aplicaciones

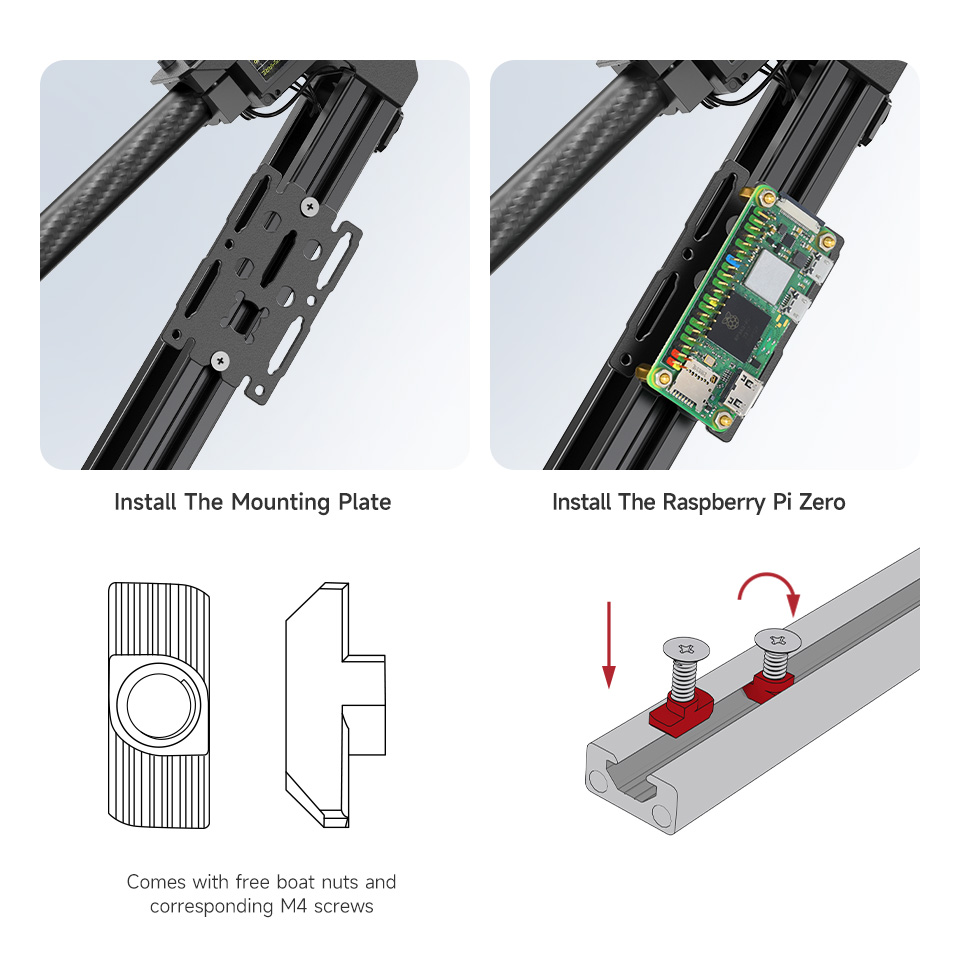
Fácil de instalar diferentes periféricos
La estructura principal del brazo superior adopta dos rieles de aluminio estándar europeo 1020, soporta la instalación de periféricos adicionales mediante tuercas de barco para satisfacer diferentes necesidades. Viene con tuercas de barco y tornillos M4 correspondientes para una fácil instalación.
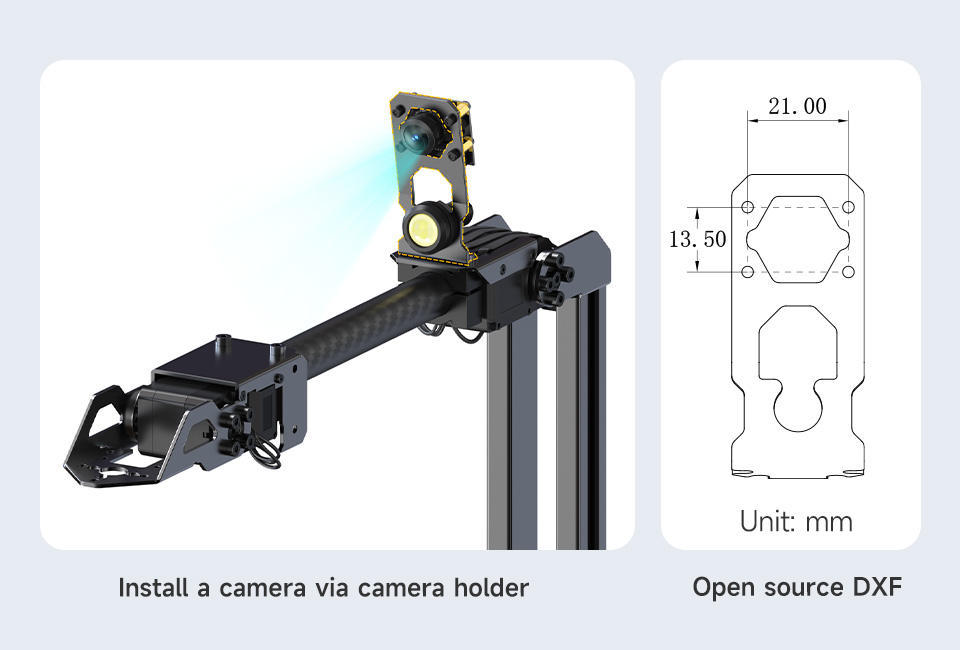
Soporta la instalación de una cámara
para ampliar aplicaciones visuales
Viene con un soporte para cámara y código abierto para los dibujos relacionados.
Puede instalar directamente una cámara del tamaño correspondiente u otras cámaras
con un adaptador
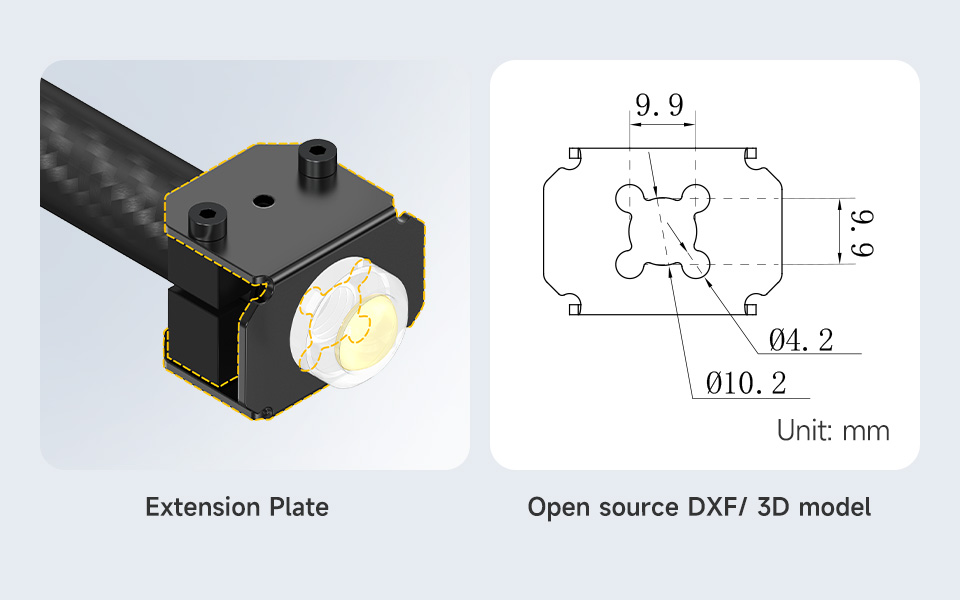
Soporta la expansión de diferentes EoAT
para más funciones
Viene con una placa de expansión, fácil para que los usuarios amplíen y reemplacen diferentes EoAT
para más funciones
Placa principal ESP32 integrada
Adopta MCU principal potente ESP32, soporta múltiples protocolos de comunicación inalámbrica, con una gran cantidad de recursos de código abierto para ayudar al desarrollo secundario de aplicaciones innovadoras
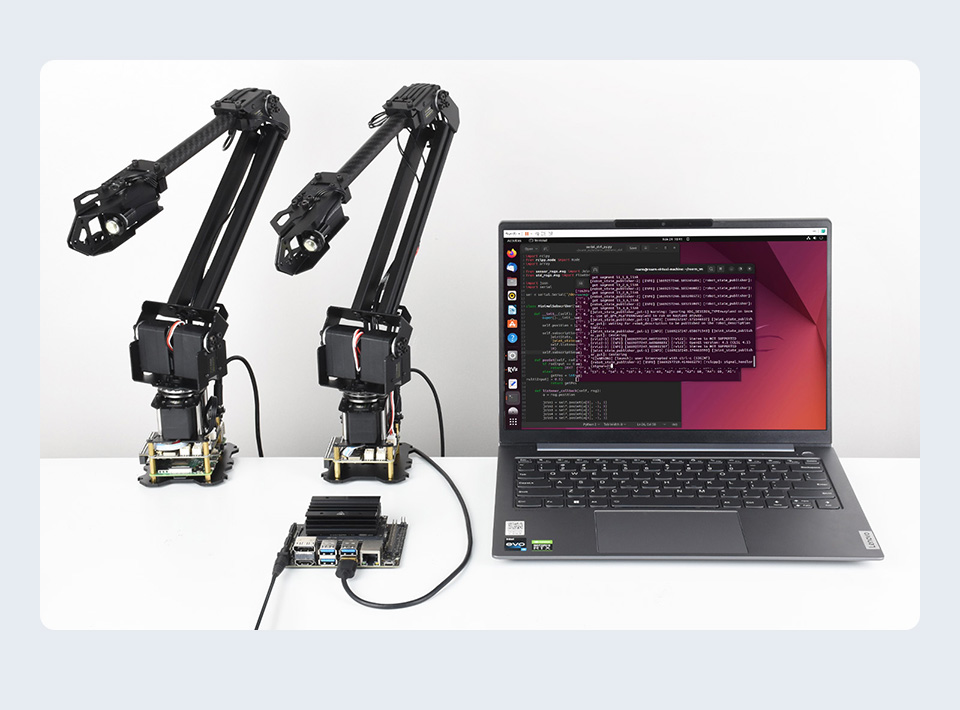
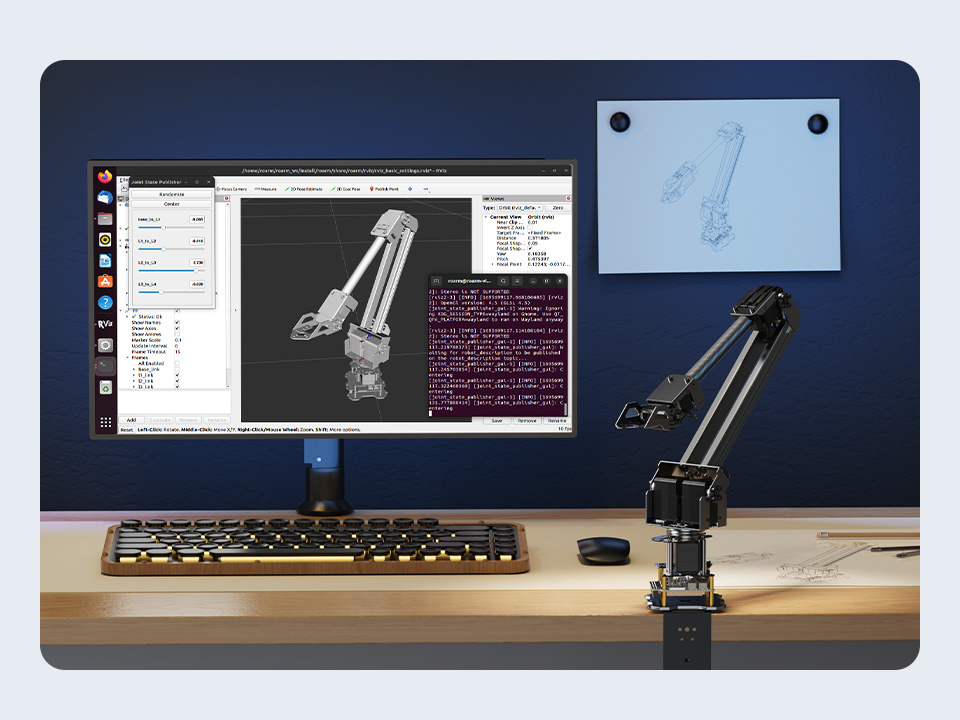
Compatible con ROS2, proporciona
Archivo de establecimiento de modelo y soporta
cooperación multi-dispositivo
Proporciona nodos de comunicación de ROS2, archivo de descripción de modelo URDF y tutorial básico de ROS2
Recursos tutoriales abundantes para
desarrollo secundario
Proporcionamos tutoriales completos y casos de unidad, incluyendo varias funciones y escenarios comunes de aplicación, para ayudar a los usuarios a comenzar rápidamente con el desarrollo secundario
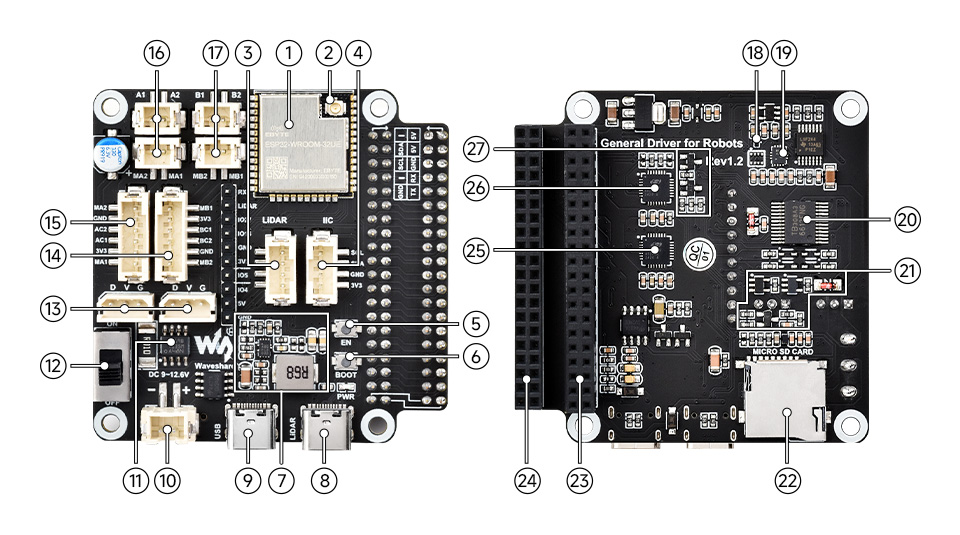
Placa de controlador general para robots
Interfaces y recursos integrados para desarrollo innovador y expansión funcional
-
Módulo controlador ESP32-WROOM-32
Puede desarrollarse usando Arduino IDE -
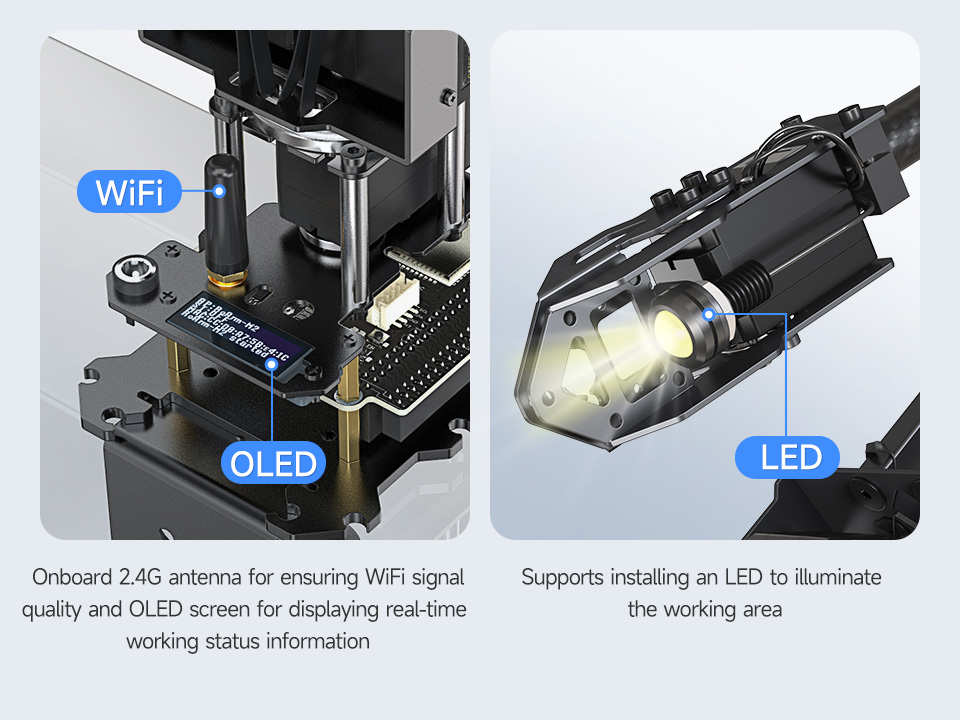
Conector WIFI IPEX1
Para conectar antena WIFI y aumentar la distancia de comunicación inalámbrica -
Interfaz LIDAR
Función integrada de adaptador de radar -
Interfaz de expansión periférica I2C
Para conectar con pantalla OLED u otros sensores I2C -
Botón de reinicio
Presione y suelte para reiniciar el ESP32 -
Botón de descarga
El ESP32 entrará en modo de descarga después de encenderlo -
Circuito regulador de voltaje DC-DC 5V
Fuente de alimentación para computadoras host como Raspberry Pi o Jetson nano -
Puerto Type-C (LADAR)
Transmisión de datos LIDAR -
Puerto Type-C (USB)
Interfaz de comunicación ESP32, para cargar programas al ESP32 -
Puerto de alimentación XH2.54
Soporta entrada DC 7~13V, puede alimentar directamente los servos y motores del bus serial -
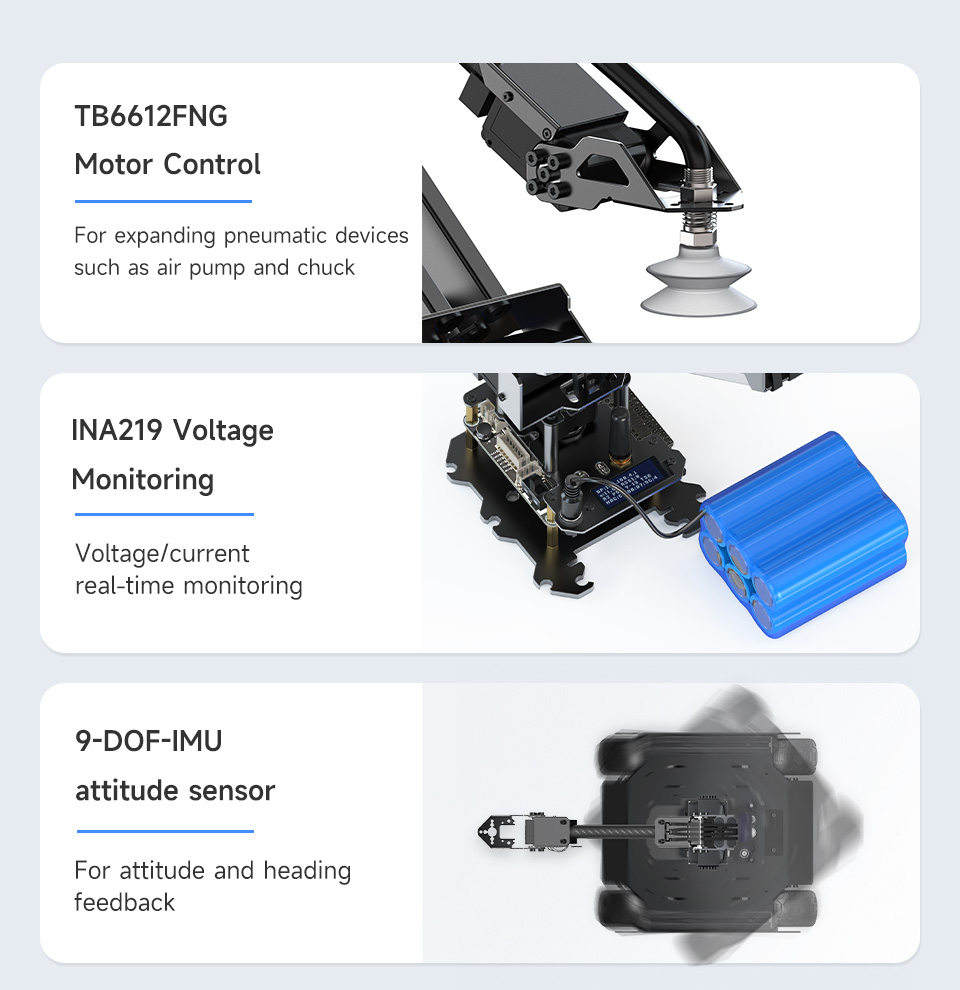
INA219
chip de monitoreo de voltaje/corriente -
Encendido/Apagado de energía
Alimentación externa ON/OFF -
Interfaz de servo de bus serial ST3215
Para conectar con servo de bus serial ST3215 -
Interfaz de motor PH2.0 6P
Interfaz del Grupo B para motor con codificador
-
Interfaz de motor PH2.0 6P
Interfaz Grupo A para motor con codificador -
Interfaz de motor PH2.0 2P
Interfaz Grupo A para motor sin codificador -
Interfaz de motor PH2.0 2P
Interfaz Grupo B para motor sin codificador -
AK09918C
Brújula electrónica de 3 ejes -
QMI8658C
Sensor de movimiento de 6 ejes -
TB6612FNG
Chip de control de motor -
Circuito de control de servo de bus en serie
para controlar múltiples servos de bus serial ST3215 y obtener retroalimentación de los servos -
Ranura para tarjeta TF
Puede usarse para almacenar registros o configuraciones WIFI -
Conector GPIO de 40 pines
Para conectar con Raspberry Pi u otras placas anfitrionas -
Encabezado extendido de 40 pines
Fácil de usar los pines GPIO de Raspberry Pi u otras placas anfitrionas -
CP-2102
UART a USB, para transmisión de datos de radar -
CP-2102
UART a USB, para comunicación ESP32 -
Circuito de descarga automática
Para cargar programas al ESP32 sin presionar los botones EN y BOOT
Recursos a bordo diversificados
Soporta expansión de funciones
Circuito integrado de control de motor TB6612FNG, monitorización de voltaje de batería INA219 y 9 ejes
Sensor IMU, soporta expansión e innovación de funciones
Interacción de arrastrar y soltar con el ratón
Proporciona aplicaciones web y software de escritorio (programas de código abierto desarrollados en Python), soporta configurar instrucciones de acción al presionar y soltar el ratón
para controlar el brazo robótico de forma flexible

Especificaciones
| DOF | 4 |
|---|---|
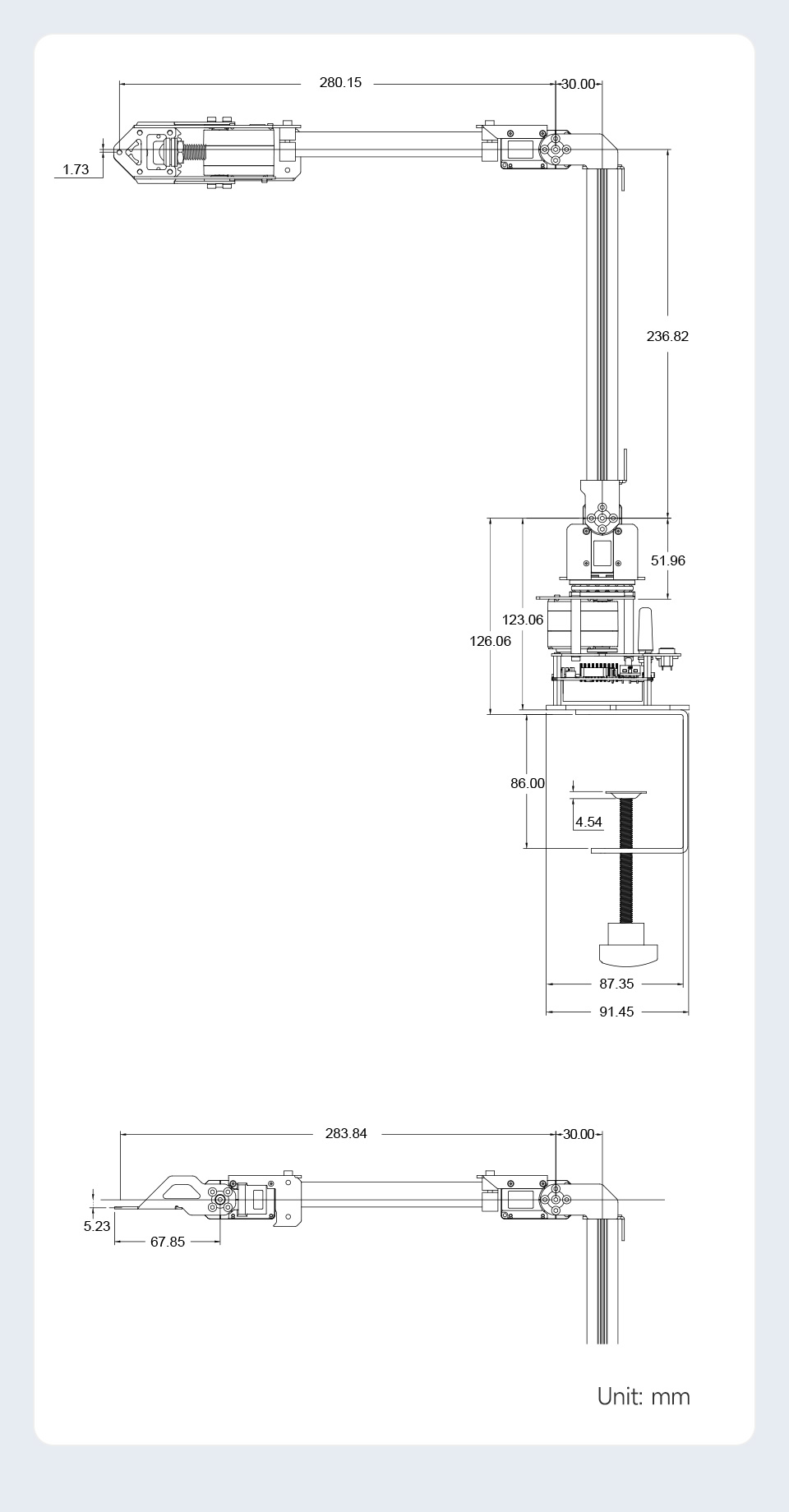
| Espacio de trabajo | Diámetro horizontal: 1090mm (Máx., omnidireccional 360°), Vertical: 798mm (Máx.) |
| Voltaje de funcionamiento | Fuente de alimentación 12V 5A, compatible con baterías de litio 3S (NO incluidas) |
| Capacidad de carga | 0.5kg@0.5m |
| Precisión de reposicionamiento | ≈±4mm (bajo la misma carga) |
| Velocidad de rotación del servo | 40rpm (sin carga, sin límite de torque) |
| Rango de operación | BASE-360°, HOMBRO-180°, CODO-180°, MANO-135°/270° |
| Tipo de accionamiento | Servo de bus serial TTL, articulación de accionamiento directo |
| Número de servos | 5 |
| Sensor de ángulo de la articulación | Encoder magnético de 12 bits y 360° |
| Torque del servo | 30KG.CM @12V |
| Información de retroalimentación de la articulación | estado del servo, ángulo de la articulación, velocidad de rotación, carga de la articulación, voltaje del servo, corriente del servo, temperatura del servo y modo de trabajo del servo |
| Control principal | ESP32-WROOM-32 |
| Características del módulo de control principal | WiFi, BT, Doble núcleo, 240MHz |
| Modo de control inalámbrico | WiFi 2.4G, ESP-NOW |
| Modo de control por cable | USB, UART |
| Modo de operación manual | Interfaz de control WEB |
| Modo de operación host | Comunicación UART/USB/ESP-NOW*/HTTP mediante comandos en formato de datos JSON (* no soporta obtener información de retroalimentación si se usa comunicación ESP-NOW) |
| Soporte del host | Dispositivos de conexión USB incluyendo Raspberry Pi, Jetson Orin Nano y PC. |
| Función EoAT | Función de abrazadera por defecto, puede cambiarse como un grado de libertad adicional |
| Potencia del LED | ≤1.5W |
| Tamaño de la pantalla OLED | 0.91inch |
| Otras funciones | Interruptor de fuente de alimentación de 2 canales de 12V, IMU de 9 grados de libertad |
| Peso del brazo robótico | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873.3 ±15g (sin incluir la abrazadera para fijar el borde de la mesa) |
| Peso de la abrazadera para fijar el borde de la mesa | 290g ±10g |
| Grosor del borde de la mesa compatible con la abrazadera | <72mm |
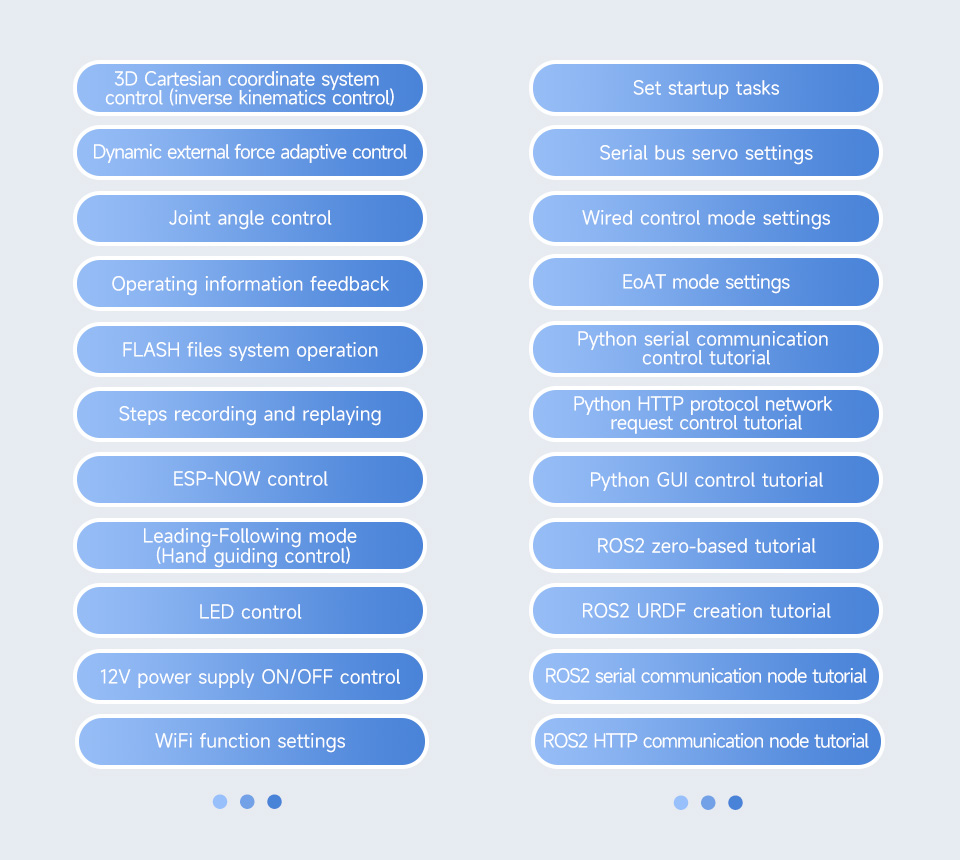
| Demostración | Control del sistema de coordenadas cartesianas 3D (control de cinemática inversa); Control adaptativo de fuerza externa dinámica; Control del ángulo de las articulaciones; Retroalimentación de información operativa; Operación del sistema de archivos FLASH; Grabación y reproducción de pasos; Control ESP-NOW; Modo líder-seguidor (control guiado a mano); Control LED; Control de encendido/apagado de fuente de alimentación de 12V; Configuración de funciones WiFi; Establecer tareas de inicio; Configuración de servos de bus serie; Configuración del modo de retroalimentación; Configuración del modo EoAT, etc. (Nota: Por favor, consulte la WIKI para más detalles) |
Demostración del producto

Dimensiones
1. Información general de envío
- Ofrecemos métodos de envío premium con número de seguimiento para cada pedido.
-
La dirección de envío debe ingresarse en inglés sin símbolos especiales para ayudar a la empresa de mensajería a reconocer su dirección en el sistema. Enviaremos según la dirección de envío que usted proporcionó. Por favor, notifíquenos cualquier cambio de dirección antes de que su pedido sea marcado como "Enviado" para evitar la pérdida del paquete.
-
Por favor, contacte a nuestro personal de servicio al cliente inmediatamente si necesita cancelar o cambiar un pedido. Una vez que su pedido haya alcanzado el estado "Enviado", ya no podrá ser cancelado ni modificado de ninguna manera. Para evitar complicaciones, revise su carrito de compras antes de finalizar la compra.
-
Podemos enviar todos los pedidos en stock dentro de 1 día hábil una vez que su pedido haya sido confirmado.
-
Todos los artículos son inspeccionados antes del envío y cuidadosamente empaquetados a mano.
-
Con la práctica estándar de mensajería, debe revisar el contenido del paquete antes de firmar por sus productos. De lo contrario, no nos haremos responsables de cualquier daño que pueda haber ocurrido durante el transporte.
2. Opciones de envío para Alemania, países de la UE* y EE. UU.
(Para productos en el almacén de Múnich, almacén de Long Beach)
2.1 Pedidos con un valor que no exceda los €5:
Opciones de envío:
| Opciones de envío | Alemania | UE* |
|---|---|---|
|
Deutsche Post |
€6 Llegada en 3-4 días hábiles |
€15 Llegada en 5-9 días hábiles |
| Opciones de envío | Estados Unidos continentales | Estados Unidos no continentales |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Llegada en 3-7 días hábiles |
€8.95 Llegada en 5-9 días hábiles |
|
UPS Express |
€13.95 Llegada en 2-4 días hábiles |
€17.95 Llegada en 3-7 días hábiles |
2.2 Opciones de envío para un valor de pedido entre €5 y €30 dentro de Alemania, €5 y €50 dentro de la UE, o €5 y €45 en EE. UU.:*
Opciones de envío:
| Opciones de envío | Alemania | UE* |
|---|---|---|
|
Deutsche Post |
€3.5 Llegada en 3-4 días hábiles |
€6 Llegada en 5-9 días hábiles |
|
DHL Paket |
€6 Llegada en 2-3 días hábiles |
€15 Llegada en 3-7 días hábiles |
|
DHL Express |
€14 Llegada en 1-2 días hábiles |
€65 Llegada en 2-3 días hábiles |
| Opciones de envío | Estados Unidos continentales | Estados Unidos no continentales |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Llegada en 3-7 días hábiles |
€6.95 Llegada en 5-9 días hábiles |
|
UPS Express |
€11.95 Llegada en 2-4 días hábiles |
€13.95 Llegada en 3-7 días hábiles |
2.3 Opciones de envío gratuito para un valor de pedido superior a €30 dentro de Alemania, €50 dentro de la UE* o €45 en EE. UU.:
| Opciones de envío gratis | Alemania | UE* |
|---|---|---|
|
Deutsche Post |
Gratis a partir de €30 | Gratis a partir de €50 |
|
DHL Paket |
+ €2 para más de €30 / Gratis a partir de €60 | + €8 para más de €50 / Gratis a partir de €80 |
|
DHL Express |
+ €10 para más de €30 | + €60 para más de €50 |
| Opciones de envío gratis | Estados Unidos continentales | Estados Unidos no continentales |
|---|---|---|
|
USPS Ground Advantage |
Gratis a partir de €45 | Gratis a partir de €60 |
|
UPS Express |
+ € 8,95 para más de €45 | + € 11,95 para más de €45 |
-
Ciertos países de la UE no están incluidos en nuestra definición de Zona UE: Reino Unido (excluyendo Irlanda), Suiza, Liechtenstein, Ciudad del Vaticano, Albania, Bielorrusia, Noruega, Ucrania e Islandia. Para los países mencionados, se aplica la Regla de Envío Internacional.
- Las regiones en el Estados Unidos no continentales incluyen: Alaska, Samoa Americana, Guam, Hawái, el Islas Marshall, el Islas Marianas del Norte, Palaos, Puerto Rico, el Islas Vírgenes de EE. UU., el Fuerzas Armadas de América, el Fuerzas Armadas en Europa, el Fuerzas Armadas en el Pacífico, y el Islas periféricas de EE. UU.. El envío y la entrega a estas áreas están sujetos a Reglas de envío para EE. UU. no continentales.
2.4 Opciones de envío para países internacionales:
(a través de Deutsche Post o YunExpress)
| Monto del pedido | Internacional |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| 50 € y más | €4 |
Aviso importante:
- Por favor, verifique la ubicación del inventario en la página del producto antes de realizar su pedido para confirmar los plazos de entrega.
- Para productos en el almacén de Shenzhen, normalmente primero enviaremos los productos desde el almacén de Shenzhen a nuestro almacén de Múnich o al almacén de Long Beach, lo que tomará alrededor de 1.5 semanas. Después de recibir el envío en Múnich/Long Beach, le enviaremos los artículos. Sólo organizaremos el envío por YunExpress desde Shenzhen para pedidos con productos en el almacén de Shenzhen por un valor superior a 50 €.
- Si si realiza un pedido con productos de ambos almacenes, Múnich y Shenzhen, primero enviaremos los productos del almacén de Múnich y luego le enviaremos los productos restantes cuando los recibamos de Shenzhen.
3. Almacén Internacional
3.1 Almacén en Alemania
3.2 Almacén en EE. UU.
3.3 Almacén en China
4. Aduanas e Impuestos
4.1 ¿Cómo maneja OpenELAB las aduanas para importación o exportación?
4.2 ¿Cómo se cobra el IVA cuando el Cliente realiza un pedido en OpenELAB?
4.3 ¿Qué tipo de tarifa se cobrará además del IVA?
Fecha de Vigencia: 7 de agosto de 2025
En OpenELAB, estamos comprometidos a proporcionar descripciones precisas de los productos y entregar productos de alta calidad. Si experimenta algún problema con su compra, notifíquenos dentro de los 30 días posteriores a la fecha de envío.
1. Renuncia de Garantía
A menos que se indique explícitamente en un acuerdo específico o en la orden de compra, OpenELAB no ofrece garantías—explícitas ni implícitas—sobre la idoneidad, adecuación o comerciabilidad de cualquier producto para un propósito particular o uso especial.
2. Política de Garantía
Período de garantía
El período estándar de garantía para productos vendidos por OpenELAB es de 12 meses desde la fecha de entrega.
Bajo esta garantía, OpenELAB hará un esfuerzo razonable para reparar o reemplazar productos sin costo alguno si los defectos se deben a problemas con materias primas, diseño o fabricación.
Si el defecto califica bajo esta política pero está fuera del alcance cubierto, pueden aplicarse cargos razonables por reparación o reemplazo.
Después del período de garantía, el soporte aún puede estar disponible por una tarifa razonable.
Exclusiones de la garantía
La garantía no aplica en los siguientes casos:
- El producto está fuera del período de garantía de 12 meses.
- Daños debido a mal uso, mantenimiento o almacenamiento inadecuado, o incumplimiento de la guía o manual de usuario.
- Problemas causados por eventos de Fuerza Mayor (por ejemplo, desastres naturales, guerra, cambios legales, etc.).
- Intentos de reparación no autorizados por el cliente.
- El producto no está defectuoso pero ha sido abierto y no es retornable según la política.
3. Devoluciones y reembolsos
Si no está satisfecho con su compra, puede ser elegible para una devolución o cambio:
- Devolución para Reembolso: Dentro de 15 días de la recepción (sin abrir).
- Devolución para Reemplazo: Dentro de 30 días de la recepción (dañado o defectuoso).
- Ventana de Cambio: Hasta 30 días desde la recepción.
Por favor envíenos un correo electrónico a info@openelab.io para una autorización de devolución antes de enviar cualquier cosa de vuelta.
Condiciones de devolución
- Los artículos deben estar en condición original, limpia y en perfecto estado con el embalaje intacto.
- No se aceptarán devoluciones de artículos dañados, usados, rayados, modificados o programados.
- Incluya el recibo, una nota breve con su nombre, número de pedido y motivo de la devolución.
Envío y Tarifas
- Los clientes son responsables del envío de devolución a nuestros almacenes en Europa, EE. UU. o China.
- Si se solicita una devolución debido a razones del cliente (por ejemplo, cambio de opinión, pedido incorrecto, etc.), tanto el costo de envío original como el costo de envío de devolución se deducirán del monto del reembolso.
- Para devoluciones debido a razones del cliente, generaremos y proporcionaremos una etiqueta de envío de devolución.
Tarifas de la Plataforma de Pago
Para todos los reembolsos solicitados por razones del cliente, se deducirá una tarifa de servicio estándar del monto del reembolso, que es cobrada por las plataformas de pago. Las tarifas específicas son las siguientes:
Shopify Payments: 1.8% + €0.3
PayPal: 4.4%
