



















































































































Waveshare høj-drejningsmoment seriel bus servo RoArm-M2 skrivebordsrobotarm sæt
Pre-order
Gratis fragt fra 30€ i Tyskland, 50€ i EU!
- Forudbestillinger sendes inden for 5 arbejdsdage.
- Leveringstid til EU- og USA-lande: 10 arbejdsdage.
- Leveringstid til andre lande: 15 arbejdsdage.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Waveshare høj-drejningsmoment seriel bus servo RoArm-M2 skrivebordsrobotarm sæt
RoArm-M2
4-DOF Højdrejningsmoment Seriel Bus Servo Robotarm
Understøtter fleksibel udvidelse og sekundær udvikling

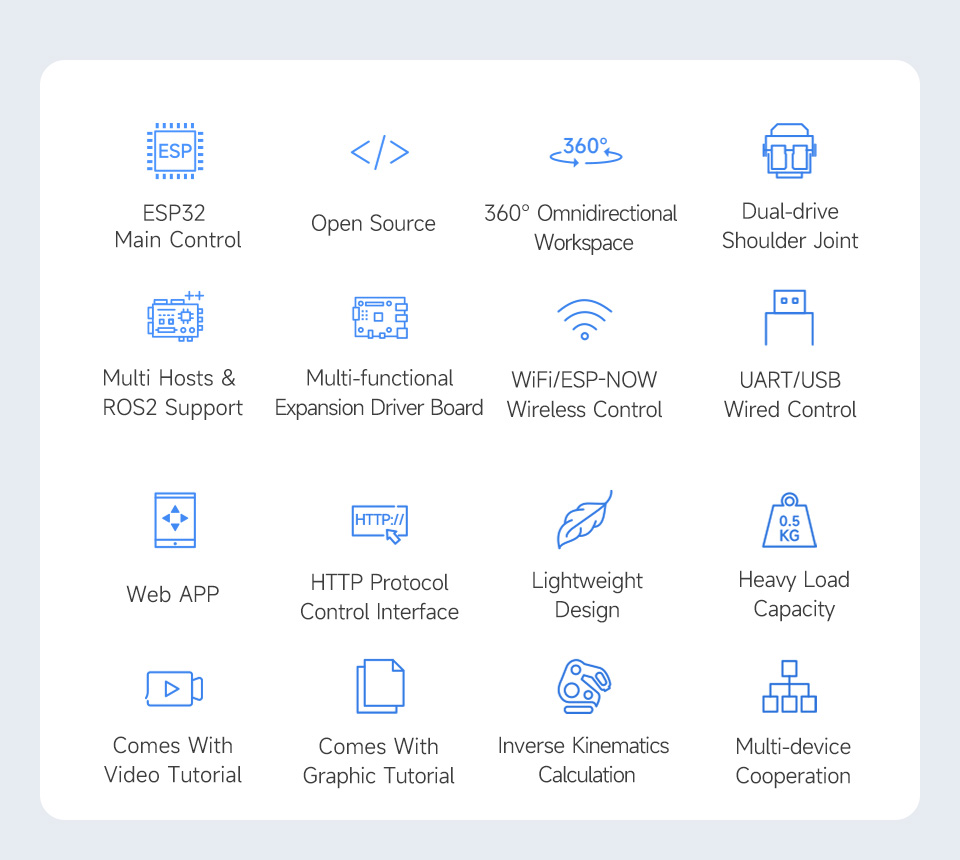
Funktioner ved et blik
RoArm-M2 serien er en 4DOF smart robotarm designet til innovative applikationer. Den anvender et letvægtsdesign med en totalvægt på under 900g og en effektiv nyttelast på [email protected], og kan fleksibelt monteres på forskellige mobile platforme. Den anvender en 360° omnidirektionel base kombineret med tre fleksible led for at skabe et arbejdsområde med en diameter på 1 meter.
Det direkte drev i leddet forbedrer repositioneringspræcisionen og øger også den strukturelle pålidelighed, med innovativ dobbelt-drev teknologi, der fordobler skulderleddets drejningsmoment. Ombord ESP32 MCU hovedkontrolmodul understøtter flere trådløse kontroltilstande, tilbyder kontrolinterfaces og rige kommunikationsprotokoller for nem tilslutning til forskellige enheder.
Tilbyder en brugervenlig og platformuafhængig WEB-applikation, der integrerer en simpel og visualiseret koordinatkontroltilstand, hvilket gør det nemmere at komme i gang. Leveres med rige grafiske og video tutorials for at hjælpe dig med at lære og bruge den hurtigt. Kompatibel med ROS2 og forskellige værtscomputere, understøtter forskellige trådløse og kablede kommunikationsmetoder. Leveres med en udvidelsesplade, understøtter tilpasning af EoAT (End of Arm Tooling) for at opfylde innovative applikationskrav.
RoArm-M2 serien opnår en fremragende balance mellem letvægt, brugervenlighed, udvidelsesmuligheder og åben innovation. Det er en multifunktionel robotarm, der integrerer intelligent kontrol, menneske-maskine interaktion og tilpasset udvikling. Ideel til applikationer, der kræver en kombination af fleksibilitet, udvidelsesmuligheder og brugervenlighed.
Versionsmuligheder
Giver muligheder for RoArm-M2-S / RoArm-M2-Pro. Den opgraderede version RoArm-M2-Pro er udstyret med fuldmetal ST3235 bus-servomotorer, hvilket giver en mere robust krop og stabilt spil, der ikke øges med brug, hvilket forbedrer produktets holdbarhed.

Parameter Sammenligning
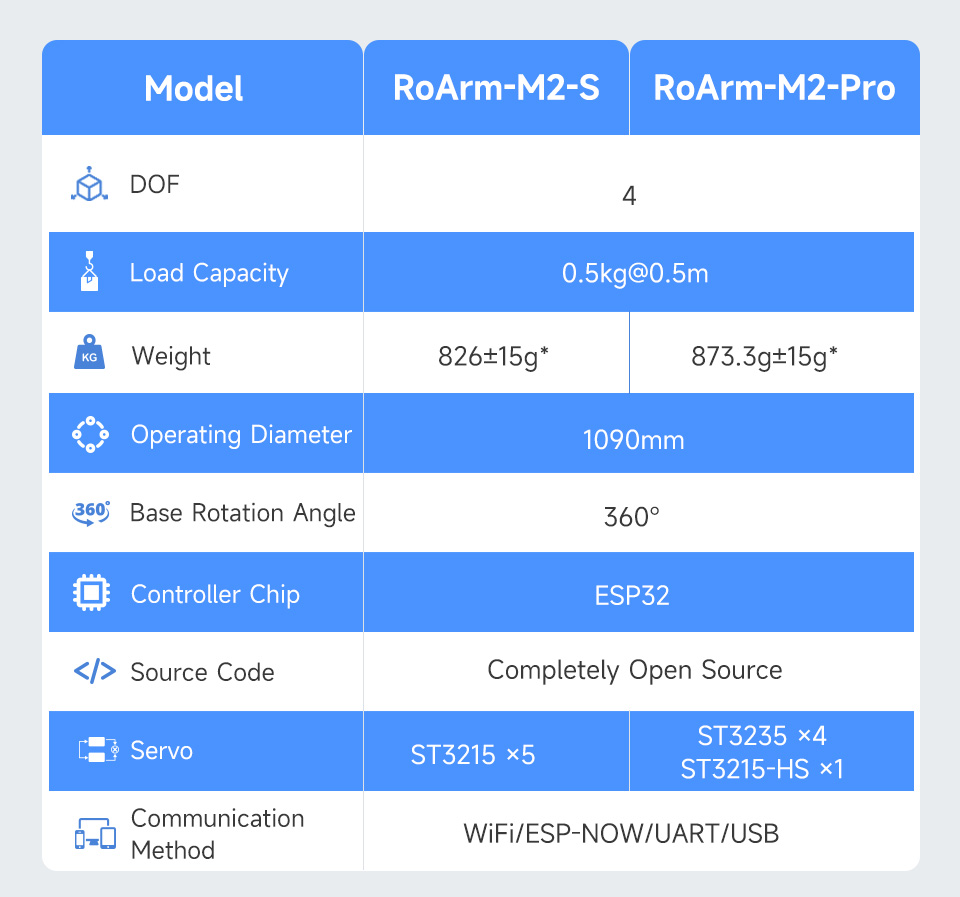
* Inkluderer ikke vægten af bordkantens fastspændingsklemme (290g).
Flere EoAT monteringsmetoder
EoAT understøtter forskellige monteringsmetoder, kan bruges som en klemme eller som den fjerde frihedsgrad. Tilbyder open source DXF og 3D-modeller til DIY og sekundær udvikling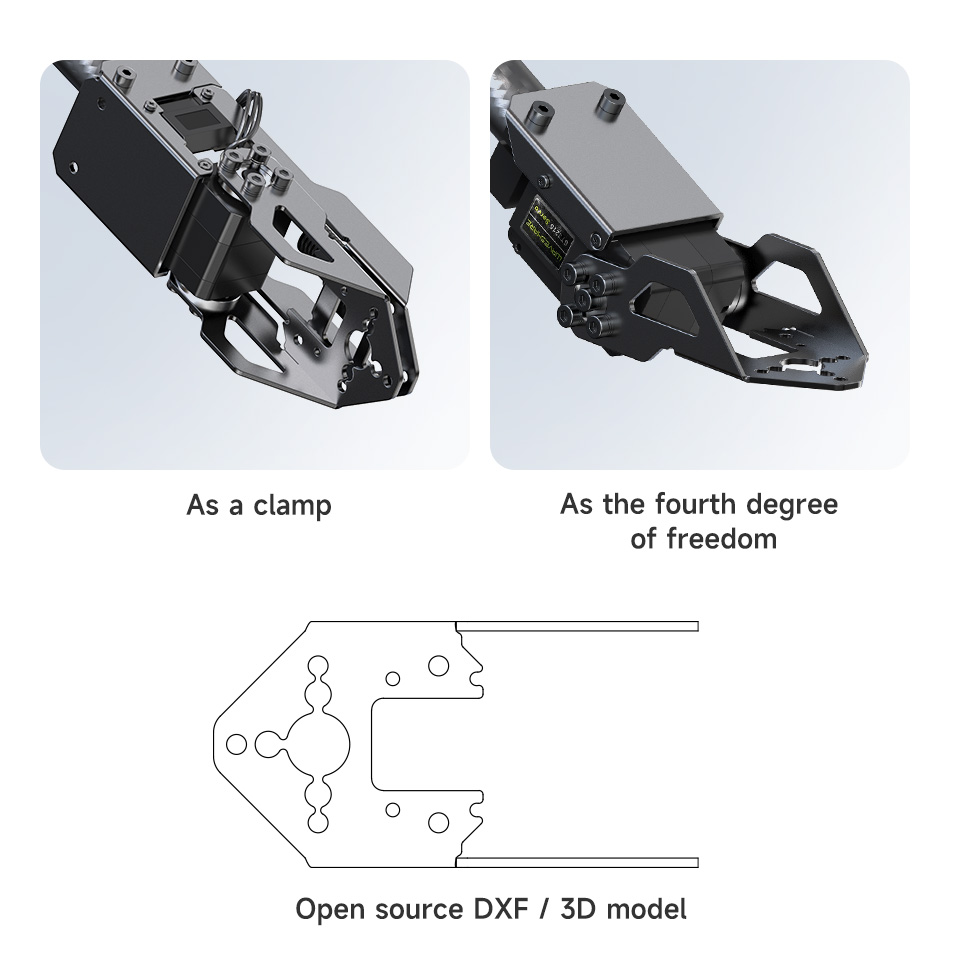
Fleksible led × omnidirektionelt rum
Anvender 360° rotationsbase og fleksible led for at skabe et omnidirektionelt arbejdsområde med en diameter på 1 meter, hvilket tillader EoAT at bevæge sig frit i alle retninger
Let at styre via
Platformuafhængig webapplikation
Ingen app-installation nødvendig, adgang efter indtastning af adressen. Gør det muligt for brugere at forbinde og styre RoArm-M2 via mobiltelefoner, tablets og computere ved at klikke på knapperne i Web Appen. Understøtter sekundær udvikling af denne open source Web App for at tilpasse brugergrænsefladen og tilføje nye funktioner.
Fuldstændig open source for
sekundær udvikling
Fuldstændig open source for kontrolkoder og kommunikationsgrænsefladedokumenter til Roarm-M2 serien, understøtter flere sprog og enheder til sekundær udvikling. Tilbyder modulopbyggede demos og tutorials for begyndere, nemt at komme i gang.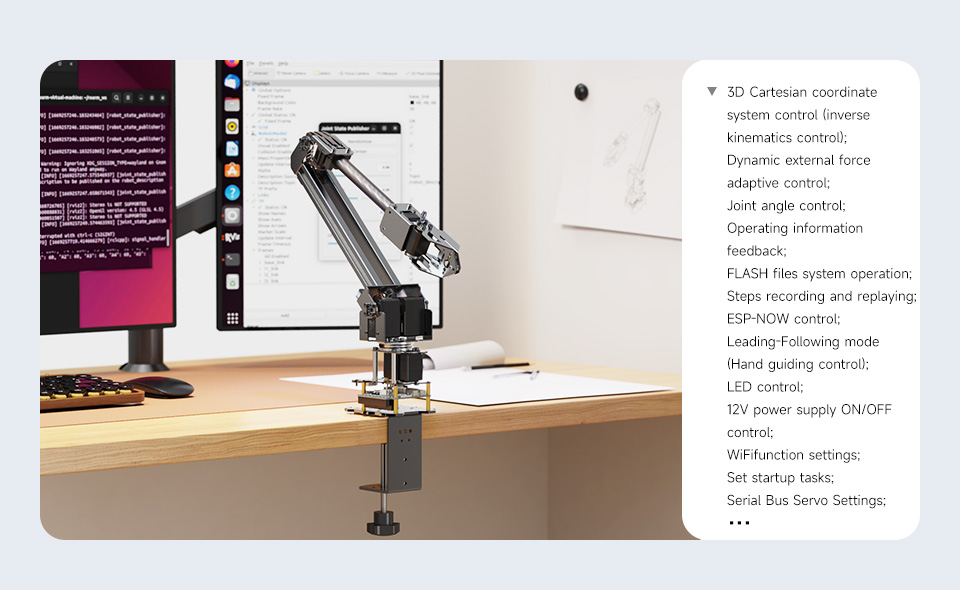
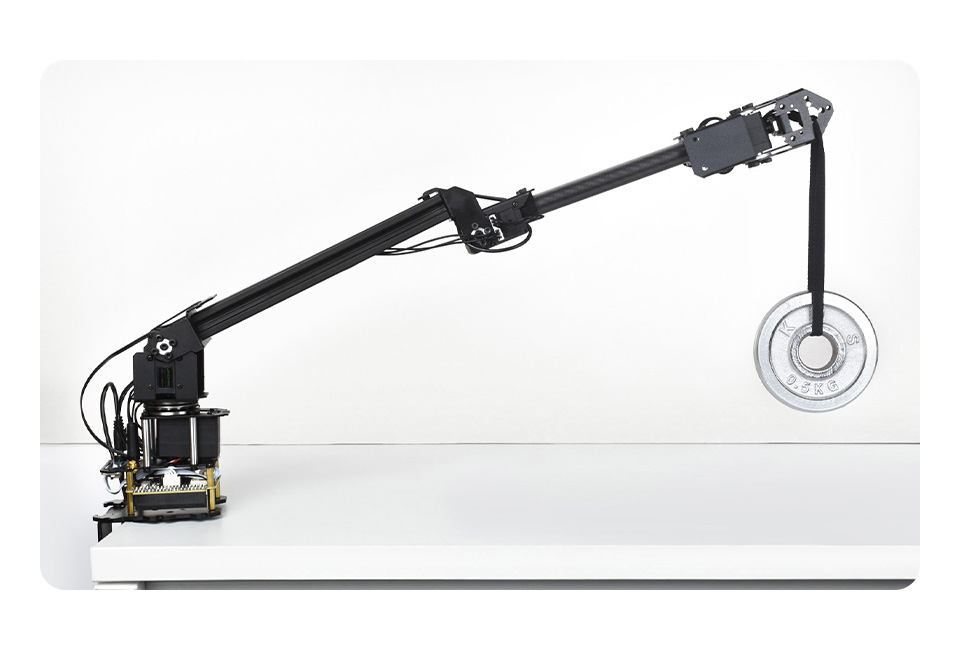
Letvægtskrop, fremragende lasteevne
letvægtskrop med en samlet vægt på under 900g, anvender kulfiber
og 5052 aluminiumlegering for at sikre stabilitet under tunge belastninger,
egnet til forskellige mobile robotchassiser

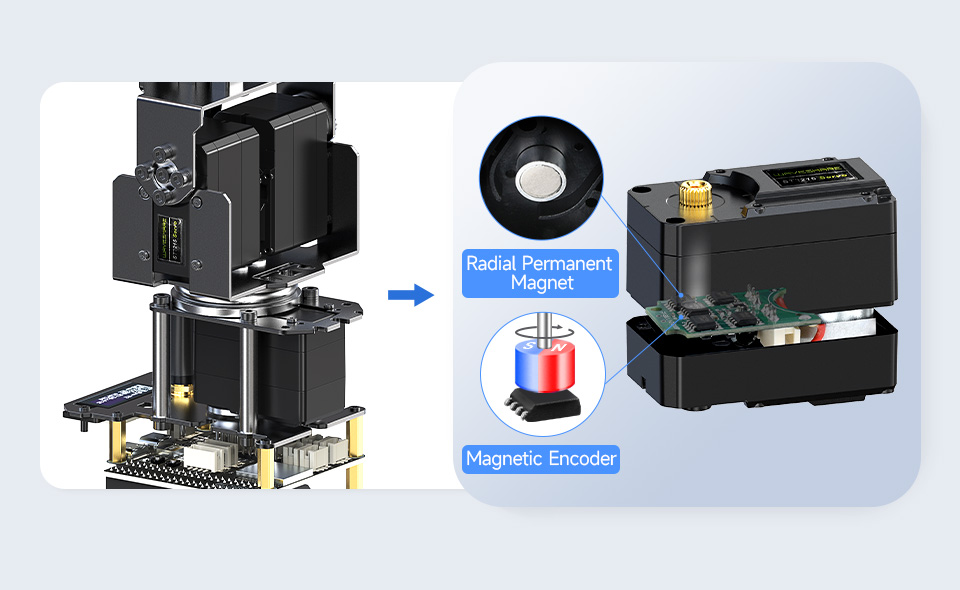
Ledets direkte drevdesign
Feedback-præcision op til 0,088°
Ledvinkel-feedback kan opnås direkte via en 12-bit højpræcisions magnetisk encoder uden nogen reduktionsgrupper, hvilket er mere præcist, og den faktiske position af det aktuelle målpunkt kan beregnes baseret på ledvinkel-feedback.
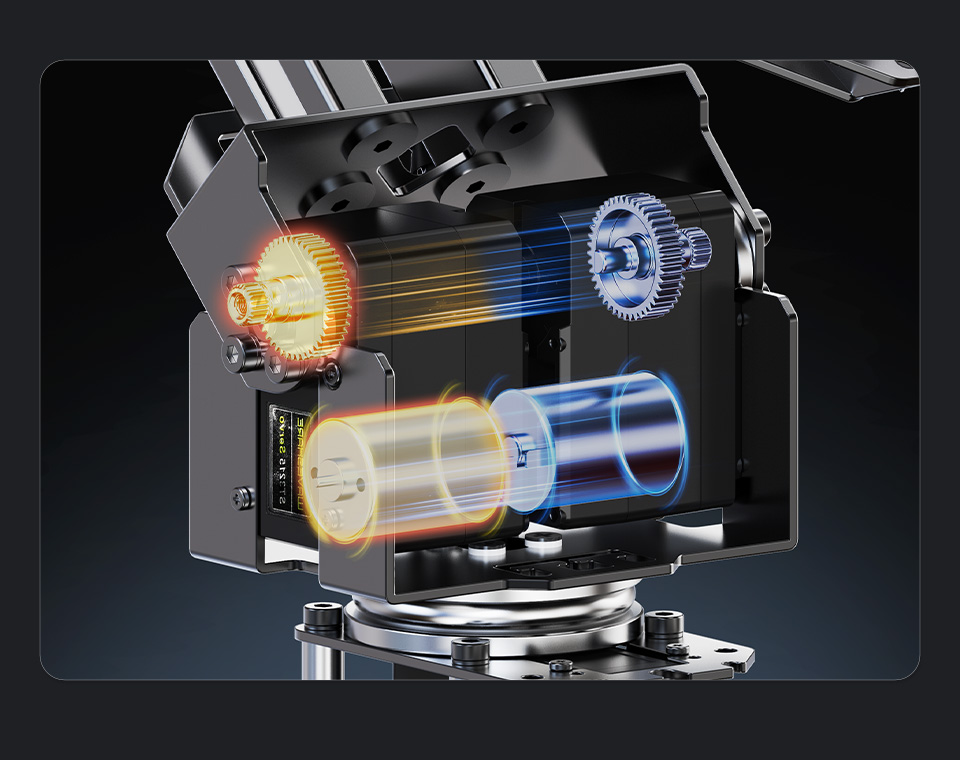
Innovativ dual-drive teknologi
fordobler skulderleddets drejningsmoment
Vi har udviklet en dual-drive kontrolalgoritme, der gør det muligt for de to servomotorer ved skulderleddet effektivt at koordinere deres udgangsmoment, hvilket markant forbedrer
kraften og den samlede belastningskapacitet for RoArm-M2-serien
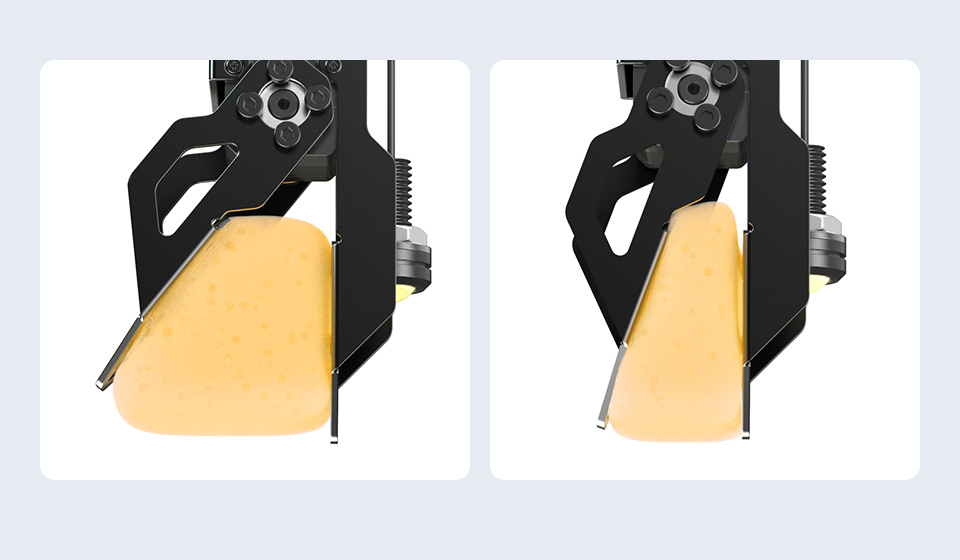
Direkte drevet klemme muliggør præcis
kraftkontrol
Det direkte drevne klemme-design tillader præcis kontrol af klemmekraften i programmet, egnet til at klemme sarte genstande uden at anvende overdreven kraft
Understøtter installation af gummibånd
for at kompensere for indflydelsen
af tyngdekraften
SKULDER- og ALBUE-leddene understøtter installation af gummibånd for at assistere robotarmen ved at udnytte gummibåndenes elastiske sammentrækning til at kompensere for tyngdekraftens indflydelse og øge robotarmens effektive belastning.
Dynamisk ekstern kraft
adaptiv kontrol
Efter aktivering af denne funktion kan du begrænse det maksimale drejningsmoment for hvert led. Når den eksterne kraft, der påføres leddet, overstiger drejningsmomentgrænsen (konfigurerbar), vil robotarmen rotere som reaktion på den eksterne kraft og vende tilbage til den angivne position, når den eksterne kraft falder under drejningsmomentgrænsen.

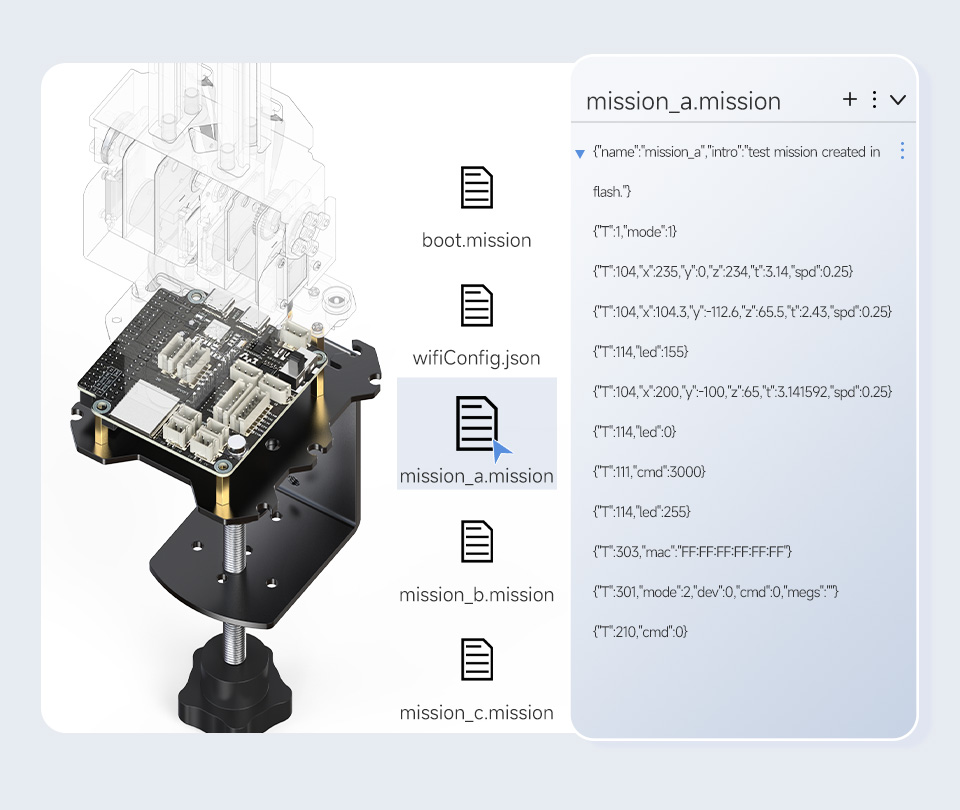
Én-klik automatisk optagelse
Let at oprette handlinger
RoArm-M2 kan gemme JSON-instruktioner til robotkontrol som opgavefiler. Opgavefilerne kan gemmes i ESP32's Flash, hvilket ikke går tabt ved strømsvigt. Robotarmen kan udføre komplekse og gentagne operationer ved at kalde disse opgavefiler.
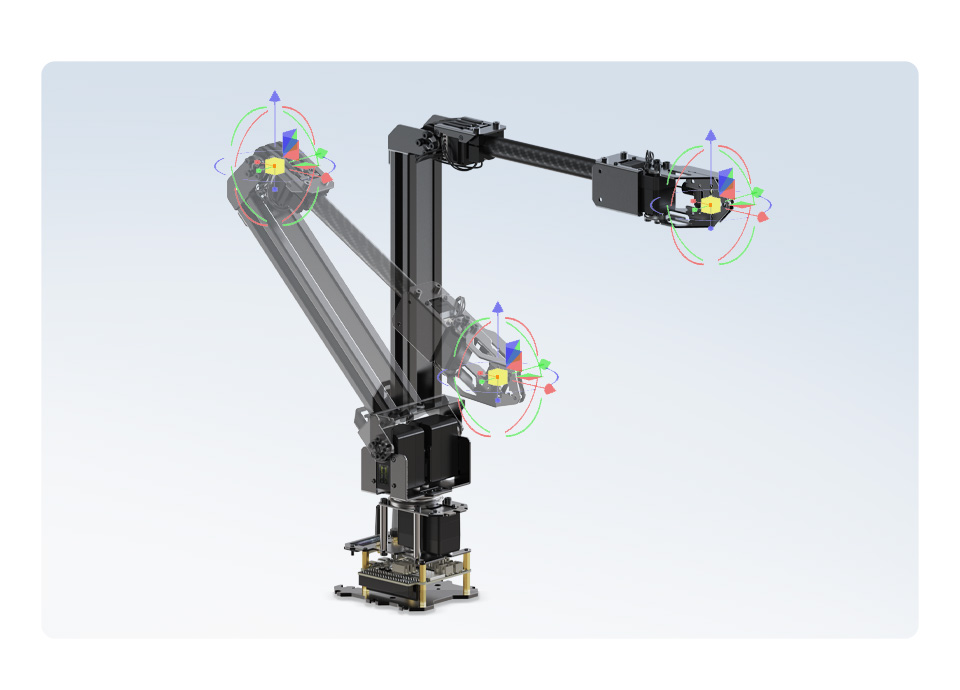
Nøjagtigt nå målet ved at indtaste koordinaterne
Open source for invers kinematik kontrolalgoritme i det tredimensionale kartesiske koordinatsystem. Efter indtastning af målpositionen kan robotarmen præcist nå målpunktet ved at bruge den inverse kinematikfunktion til at beregne rotationsvinklen for hvert led.
Kurvehastighedskontrol for
Glattere bevægelse
Vi bruger kurvehastighedskontrolalgoritmen for at få robotarmen til at bevæge sig glattere og mere naturligt, uden svingninger under start og stop

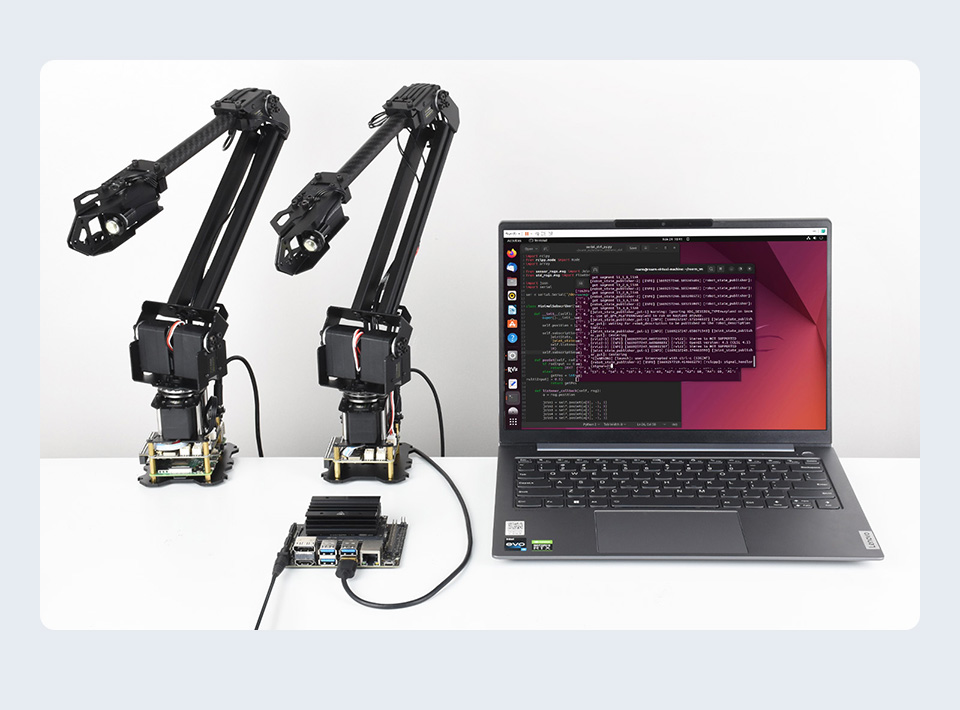
ESP-NOW trådløs kontrol
Lavforsinket fjernsamarbejde
ESP-NOW er en lavforsinkelses ad hoc trådløs kommunikationsprotokol, uden behov for netværksinfrastruktur. Du kan bruge en robotarm til trådløst at styre andre robotarme, og kontrolmetoderne kan sættes til broadcast-kontrol, gruppe-kontrol og en-til-en kontrol.
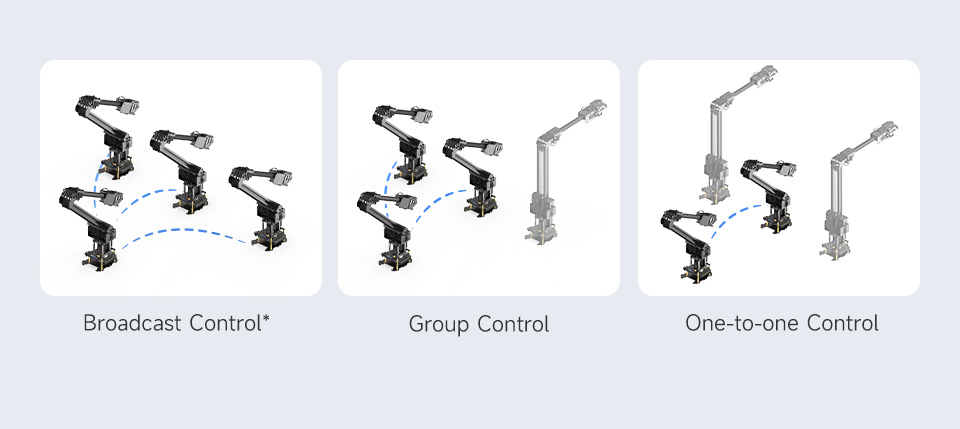
* Bemærk: Broadcast-kontrol har ingen begrænsning på antallet af styrede enheder, mens gruppe-kontrol tillader op til 20 enheder. Se venligst WIKI for flere detaljer.
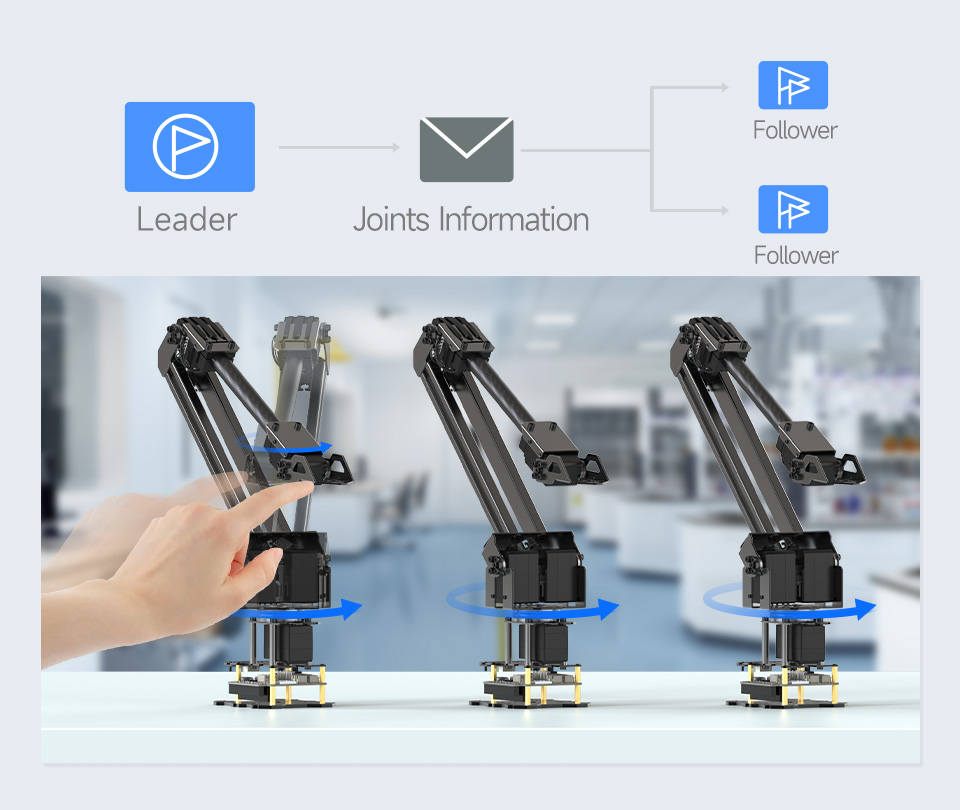
Understøtter fører-følger kontroltilstand baseret på ESP-NOW
I fører-følger kontroltilstand sender lederrobotarmen sin ledvinkelinformation til andre robotarme via ESP-NOW kommunikation. De andre robotarme, som er i ESP-NOW følger-tilstand, efterligner de samme handlinger som lederen i realtid.
Flere kontrolgrænseflader,
understøttelse af flere enheder og sprog
RoArm-M2 serien kan ikke kun styres via WEB-applikationen, men understøtter også brug af andre controllere til at sende JSON-kommandoer via HTTP-protokol netværksanmodning, seriel kommunikation eller USB-kommunikation for styring og feedback.
Flere installationsmetoder til integration i din applikation
Tilbyder flere installationsordninger og relaterede ressourcer til sekundær udvikling, egnet til forskellige brugsscenarier og kan fleksibelt integreres i dine projekter og applikationer

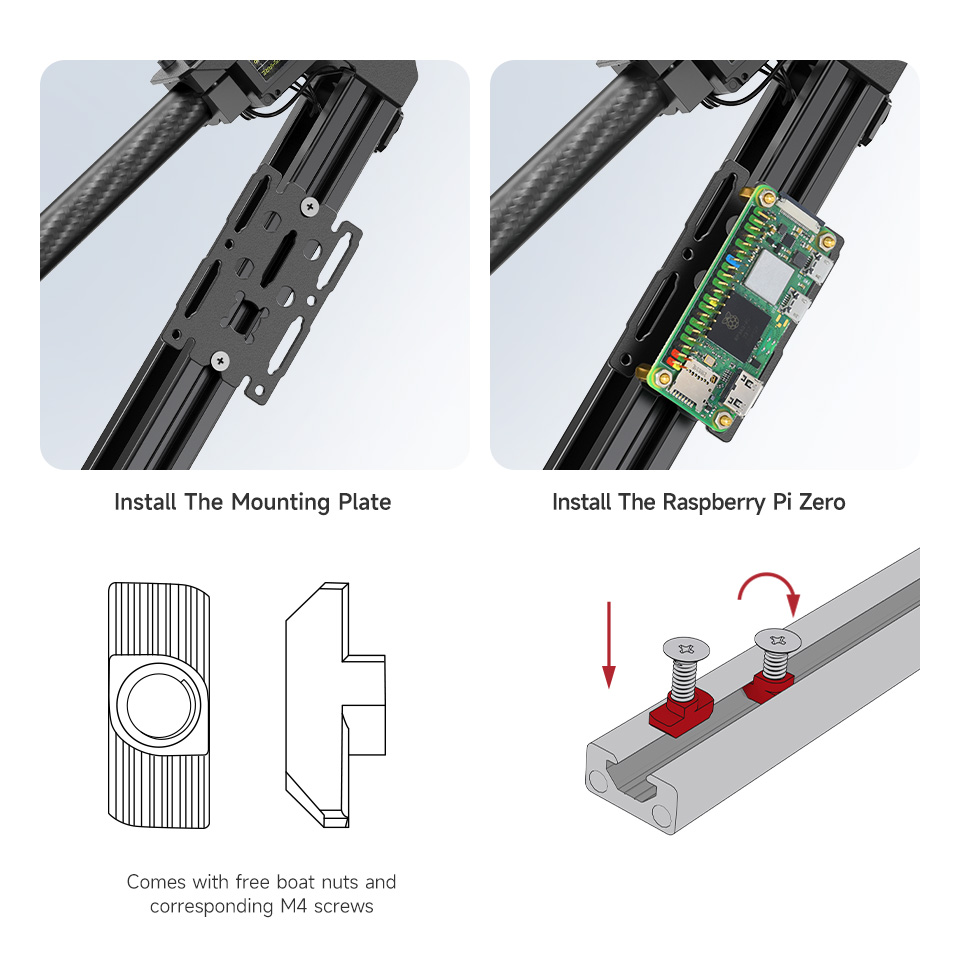
Nem installation af forskellige perifere enheder
Hovedstrukturen af overarmen anvender to 1020 europæiske standard aluminiumsprofiler, understøtter installation af yderligere perifere enheder via bådmøtrikker for at imødekomme forskellige behov. Leveres med bådmøtrikker og tilsvarende M4-skruer for nem installation.
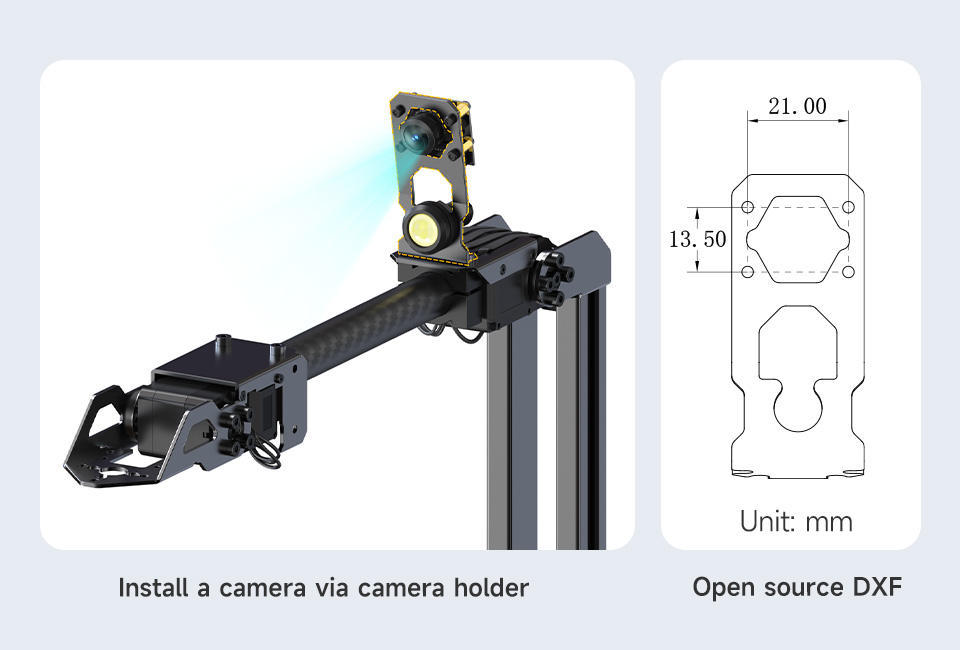
Understøtter installation af et kamera
for at udvide visuelle applikationer
Leveres med en kameraholder og open source for de relaterede tegninger.
Du kan direkte installere et kamera med den tilsvarende størrelse eller andre kameraer
med en adapter
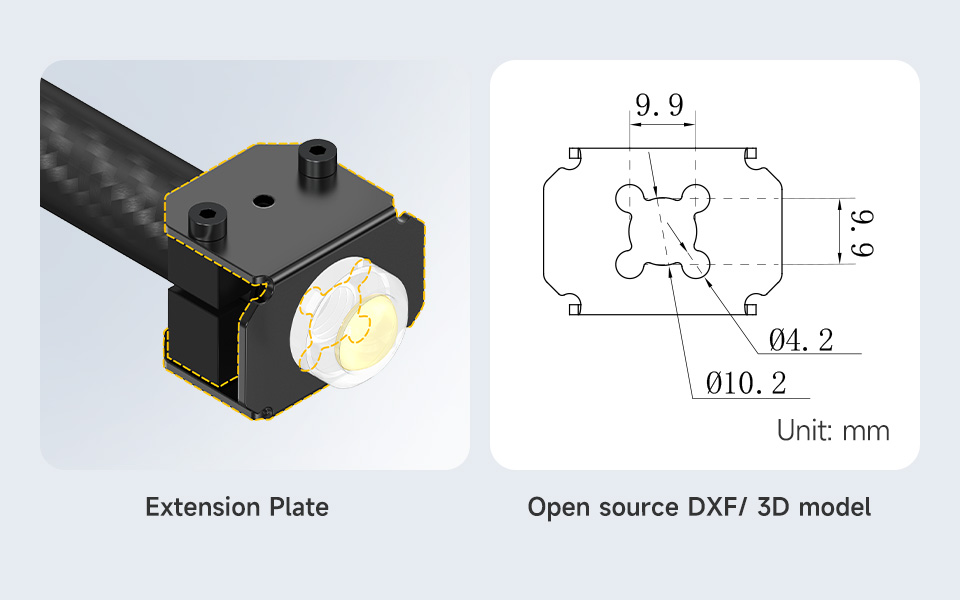
Understøtter udvidelse af forskellige EoAT
for flere funktioner
Leveres med en udvidelsesplade, nem for brugere at udvide og udskifte forskellige EoAT
for flere funktioner
Indbygget ESP32 hovedkontrolkort
Anvender ESP32 kraftfuld hovedkontrol MCU, understøtter flere trådløse kommunikationsprotokoller, med en stor mængde open source-ressourcer til at hjælpe sekundær udvikling af innovative applikationer
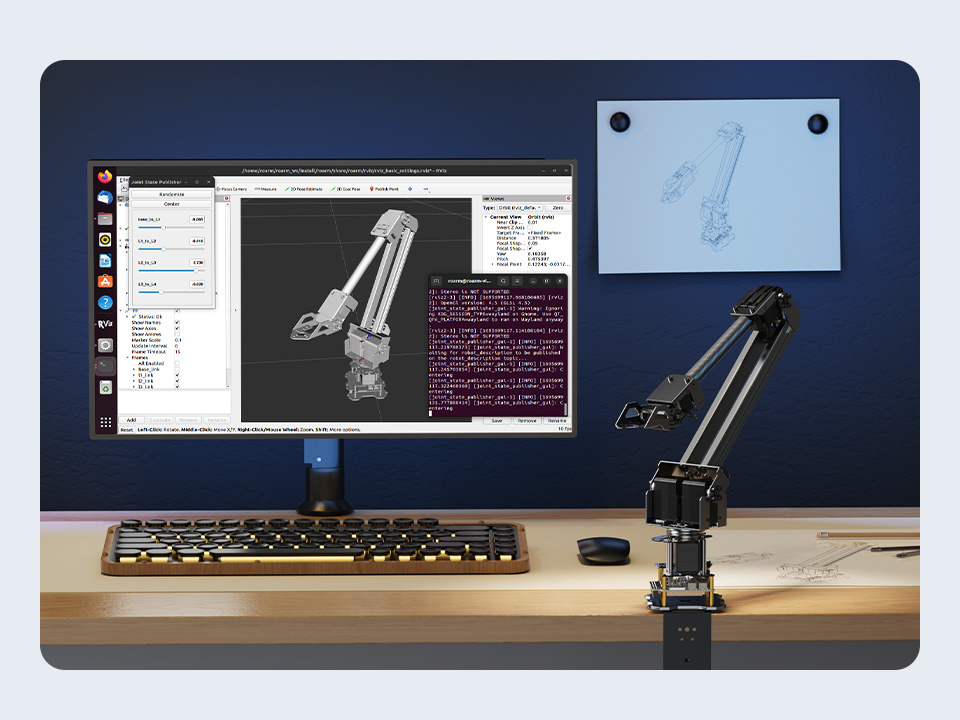
Kompatibel med ROS2, tilbyder
modeloprettelsesfil og understøtter
samarbejde mellem flere enheder
Tilbyder kommunikationsnoder til ROS2, URDF-modelbeskrivelsesfil og grundlæggende tutorial til ROS2
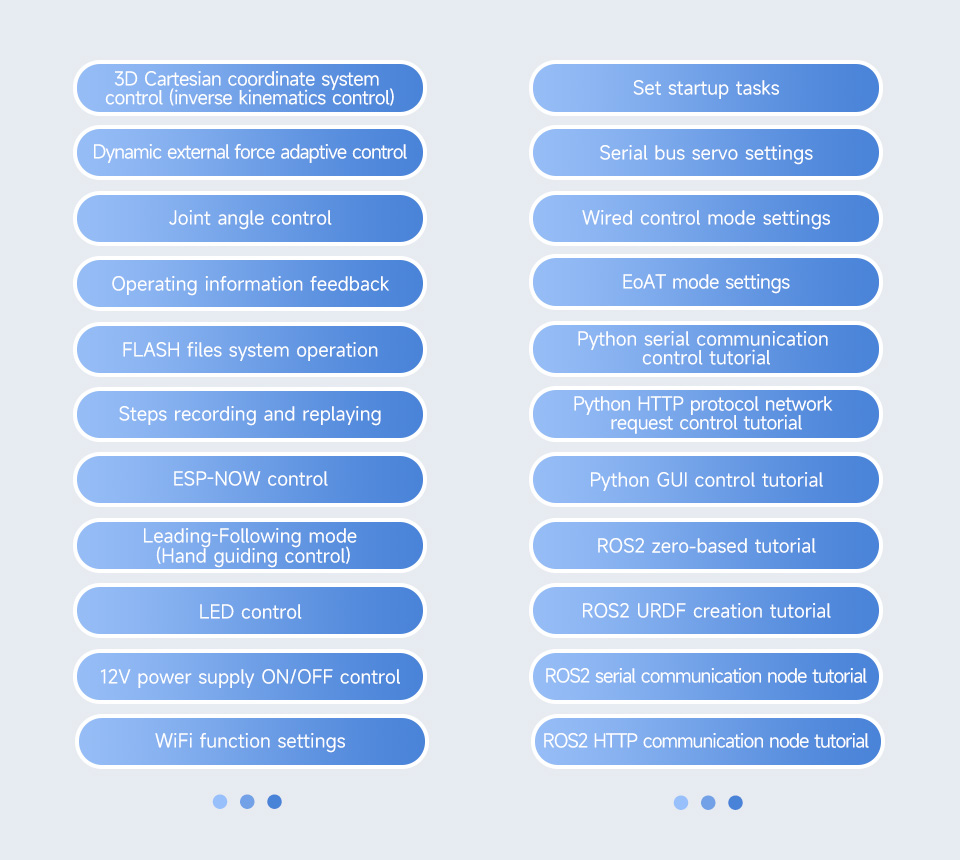
Rige tutorialressourcer til
sekundær udvikling
Vi tilbyder komplette enhedstutorials og cases, inklusive forskellige funktioner og almindelige anvendelsesscenarier, for at hjælpe brugere med hurtigt at komme i gang med sekundær udvikling
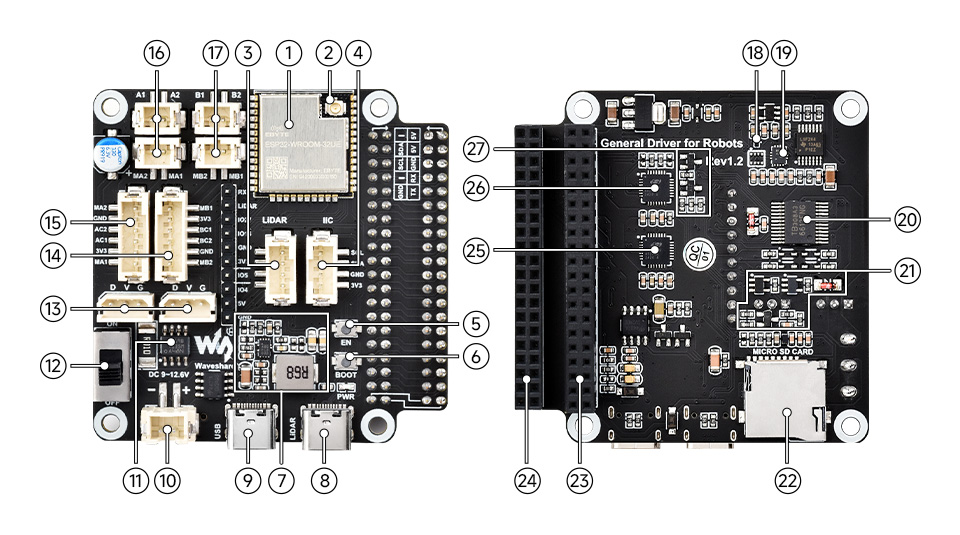
Generelt driverkort til robotter
Indbyggede rige grænseflader og ressourcer til innovativ udvikling og funktionel udvidelse
-
ESP32-WROOM-32 styremodul
Kan udvikles ved hjælp af Arduino IDE -
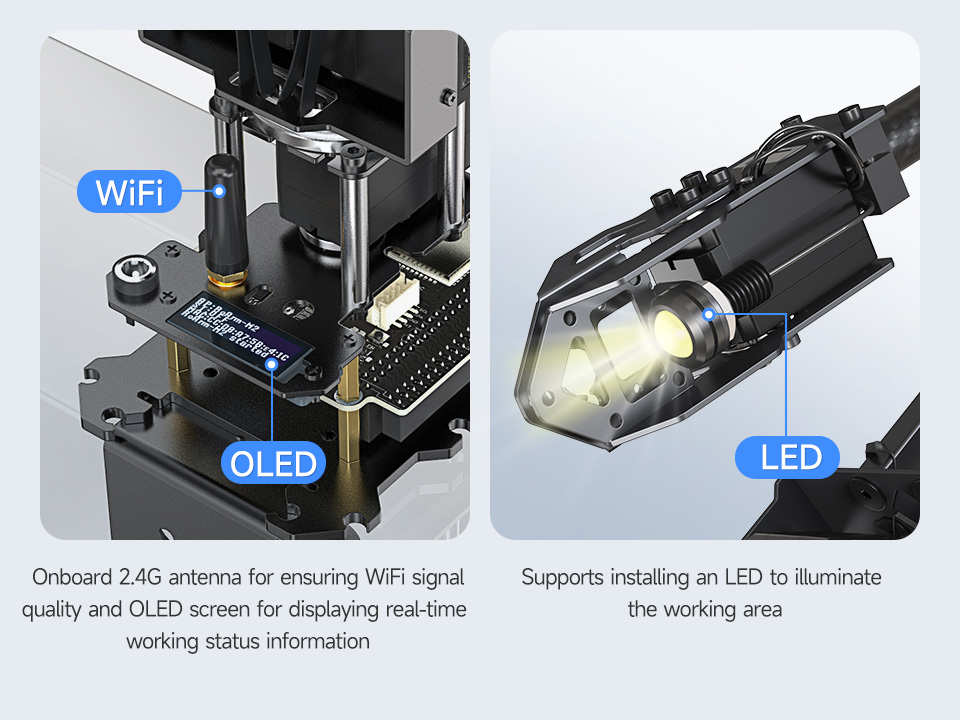
IPEX1 WIFI-stik
Til tilslutning af WIFI-antenne for at øge den trådløse kommunikationsafstand -
LIDAR-grænseflade
Integreret radaradapterfunktion -
I2C perifer udvidelsesgrænseflade
Til tilslutning af OLED-skærm eller andre I2C-sensorer -
Nulstillingsknap
Tryk og slip for at genstarte ESP32 -
Download-knap
ESP32 går i download-tilstand efter tænding -
DC-DC 5V spændingsregulatorkreds
Strømforsyning til værtscomputere som Raspberry Pi eller Jetson nano -
Type-C port (LADAR)
LIDAR dataoverførsel -
Type-C port (USB)
ESP32 kommunikationsinterface, til upload af programmer til ESP32 -
XH2.54 strømport
Understøtter DC 7~13V input, kan direkte forsyne seriel bus servos og motorer -
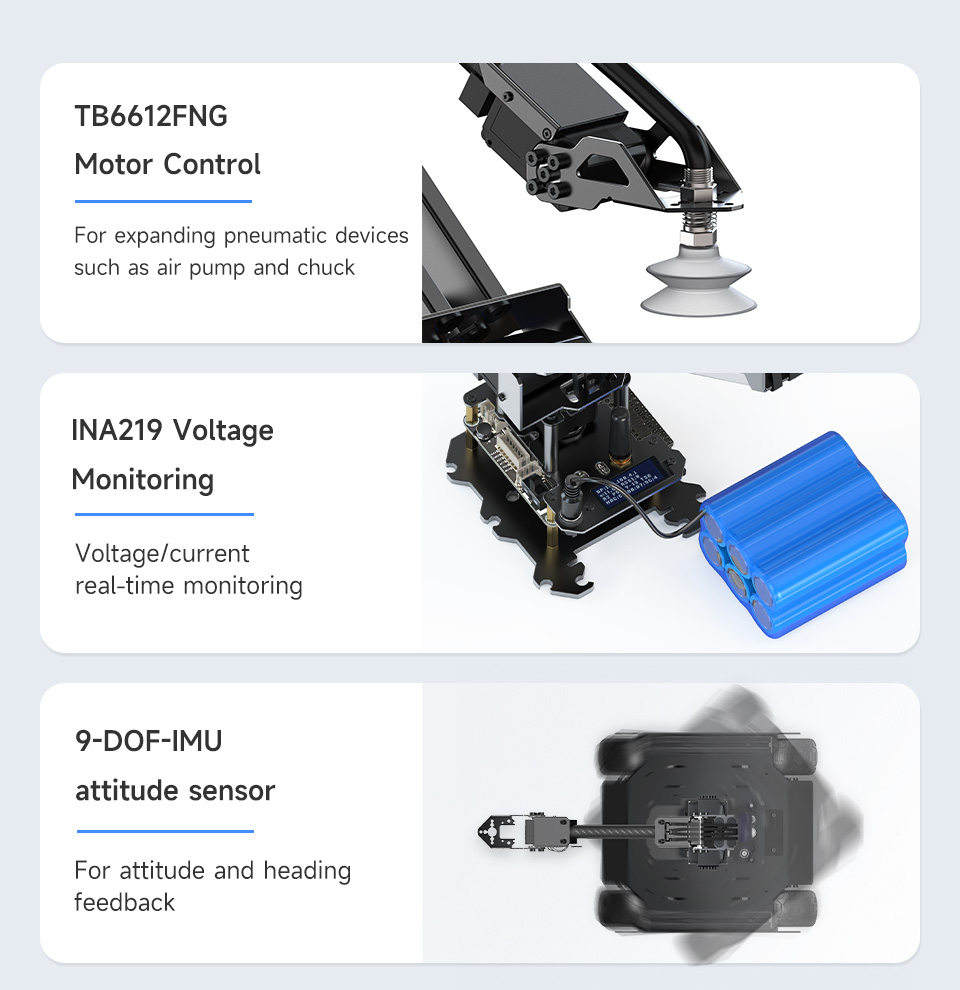
INA219
spændings-/strømmålechip -
Strøm TIL/FRA
Ekstern strømforsyning TIL/FRA -
ST3215 seriel bus servo interface
Til tilslutning med ST3215 seriel bus servo -
Motorinterface PH2.0 6P
Gruppe B interface til motor med encoder
-
Motorinterface PH2.0 6P
Gruppe A interface til motor med encoder -
Motorinterface PH2.0 2P
Gruppe A interface til motor uden encoder -
Motorinterface PH2.0 2P
Gruppe B interface til motor uden encoder -
AK09918C
3-akset elektronisk kompas -
QMI8658C
6-akset bevægelsessensor -
TB6612FNG
Motorstyringschip -
Seriel bus servo kontrolkreds
til styring af flere ST3215 serielle bus-servomotorer og modtagelse af servo-feedback -
TF-kortplads
Kan bruges til at gemme logs eller WIFI-konfigurationer -
40PIN GPIO header
Til tilslutning med Raspberry Pi eller andre værtskort -
40PIN udvidet header
Let at bruge GPIO-benene på Raspberry Pi eller andre værtskort -
CP-2102
UART til USB, til radardatatransmission -
CP-2102
UART til USB, til ESP32 kommunikation -
Automatisk downloadkreds
Til upload af programmer til ESP32 uden at trykke på EN og BOOT knapperne
Diversificerede ombordressourcer
Understøtter funktionsudvidelse
Integreret TB6612FNG motorstyrings-IC, INA219 batterispændingsovervågning og 9-akset
IMU-sensor, understøtter funktionsudvidelse og innovation
Mus træk-og-slip interaktion
Leverer webapplikationer og desktopsoftware (open-source programmer udviklet i Python), understøtter indstilling af handlingsinstruktioner ved museklik og -frigivelse
for at styre robotarmen fleksibelt

Specifikationer
| DOF | 4 |
|---|---|
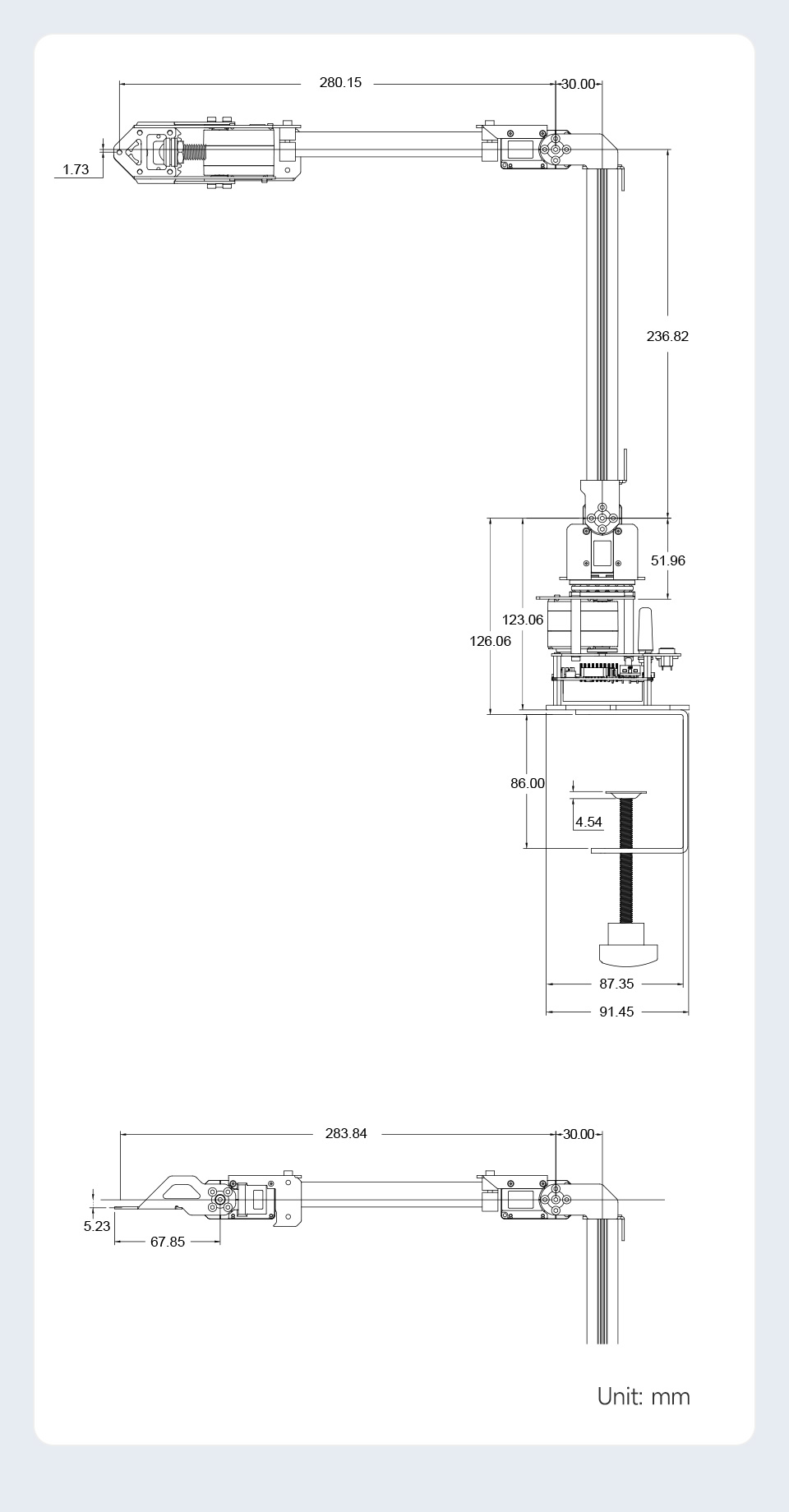
| Arbejdsområde | Horisontal diameter: 1090mm (Max, 360° omnidirektionel), Vertikal: 798mm (Max) |
| Driftsspænding | 12V 5A strømforsyning, understøtter 3S Lithium-batterier (IKKE inkluderet) |
| Belastningskapacitet | 0.5kg@0.5m |
| genplaceringspræcision | ≈±4mm (under samme belastning) |
| Servo rotationshastighed | 40rpm (uden belastning, uden momentbegrænsning) |
| Driftsområde | BASE-360°, SKULDER-180°, ALBUE-180°, HÅND-135°/270° |
| Drivtype | TTL seriel bus servo, direkte drevet led |
| Servo antal | 5 |
| Ledvinkelsensor | 12-bit 360° magnetisk encoder |
| Servo moment | 30KG.CM @12V |
| Led feedbackinformation | servo status, ledvinkel, rotationshastighed, led belastning, servo spænding, servo strøm, servo temperatur og servo arbejdsmode |
| Hovedkontrol | ESP32-WROOM-32 |
| Hovedkontrolmodulets funktioner | WiFi, BT, Dual Core, 240MHz |
| Trådløs kontroltilstand | 2.4G-WiFi, ESP-NOW |
| Kablet kontroltilstand | USB, UART |
| Manuel driftsfunktion | WEB-kontrolinterface |
| Værtsdriftsfunktion | UART/USB/ESP-NOW*/HTTP-kommunikation via JSON-dataformatkommandoer (* det understøtter ikke at modtage feedbackinformation ved brug af ESP-NOW-kommunikation) |
| Værtsunderstøttelse | USB-forbundne enheder inklusive Raspberry Pi, Jetson Orin Nano og PC. |
| EoAT-funktion | klemmefunktion som standard, kan ændres til en ekstra frihedsgrad |
| LED-effekt | ≤1,5W |
| OLED-skærmstørrelse | 0.91inch |
| Andre funktioner | 2-kanals 12V strømforsyningsafbryder, 9-DOF IMU |
| Robotarmvægt | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873,3 ±15g (inkluderer ikke bordkantfastgørelsesklemmen) |
| vægt af bordkantfastgørelsesklemme | 290g ±10g |
| Understøttet bordkanttykkelse til klemmen | <72mm |
| Demo | 3D kartesisk koordinatsystemkontrol (invers kinematik kontrol); Dynamisk ekstern kraft adaptiv kontrol; Ledvinkelkontrol; Driftsinformationsfeedback; FLASH-filsystemoperation; Trinoptagelse og afspilning; ESP-NOW kontrol; Leading-Following-tilstand (håndstyring); LED-kontrol; 12V strømforsyning TIL/FRA kontrol; WiFi-funktionsindstillinger; Indstil opstartopgaver; Seriel bus servoindstillinger; Feedback-tilstandsindstilling; EoAT-tilstandsindstilling osv. (Bemærk: Se venligst WIKI for flere detaljer) |
Produktvisning

Dimensioner
1. Generel forsendelsesinformation
- Vi tilbyder premium forsendelsesmetoder med et sporingsnummer for hver ordre.
-
Forsendelsesadressen skal indtastes på engelsk uden særlige symboler for at hjælpe kurerfirmaet med at genkende din adresse i systemet. Vi sender i henhold til den forsendelsesadresse, du har angivet. Underret os venligst om eventuelle adresseændringer, inden din ordre markeres som "Afsendt" for at undgå tab af pakke.
-
Kontakt venligst vores kundeservicemedarbejdere straks, hvis du har brug for at annullere eller ændre en ordre. Når din ordre har opnået status "Afsendt", kan den ikke længere annulleres eller ændres på nogen måde. For at undgå komplikationer, tjek venligst din indkøbskurv igen inden betaling.
-
Vi kan sende alle lagervarer inden for 1 arbejdsdag, da din ordre er bekræftet.
-
Alle varer inspiceres før afsendelse og pakkes omhyggeligt i hånden.
-
Ved standard kurerpraksis skal du kontrollere pakkens indhold, før du kvitterer for dine varer. Ellers kan vi ikke holdes ansvarlige for eventuelle skader, der måtte være opstået under transport.
2. Forsendelsesmuligheder for Tyskland, EU*-lande og USA
(For produkter på lager i München, lager i Long Beach)
2.1 Ordrer med en værdi på højst €5:
Forsendelsesmuligheder:
| Forsendelsesmuligheder | Tyskland | EU* |
|---|---|---|
|
Deutsche Post |
€6 Ankommer inden for 3-4 hverdage |
€15 Ankommer inden for 5-9 hverdage |
| Forsendelsesmuligheder | Kontinentale USA | Ikke-kontinentale USA |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Ankommer inden for 3-7 hverdage |
€8.95 Ankommer inden for 5-9 hverdage |
|
UPS Express |
€13.95 Ankommer inden for 2-4 hverdage |
€17.95 Ankommer inden for 3-7 hverdage |
2.2 Forsendelsesmuligheder for en ordre mellem €5 og €30 i Tyskland, €5 og €50 i EU eller €5 og €45 i USA:*
Forsendelsesmuligheder:
| Forsendelsesmuligheder | Tyskland | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Ankommer inden for 3-4 hverdage |
€6 Ankommer inden for 5-9 hverdage |
|
DHL Paket |
€6 Ankommer inden for 2-3 hverdage |
€15 Ankommer inden for 3-7 hverdage |
|
DHL Express |
€14 Ankommer inden for 1-2 hverdage |
€65 Ankommer inden for 2-3 hverdage |
| Forsendelsesmuligheder | Kontinentale USA | Ikke-kontinentale USA |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Ankommer inden for 3-7 hverdage |
€6.95 Ankommer inden for 5-9 hverdage |
|
UPS Express |
€11.95 Ankommer inden for 2-4 hverdage |
€13.95 Ankommer inden for 3-7 hverdage |
2.3 Gratis forsendelsesmuligheder for en ordre over €30 i Tyskland, €50 i EU* eller €45 i USA:
| Gratis forsendelsesmuligheder | Tyskland | EU* |
|---|---|---|
|
Deutsche Post |
Gratis over €30 | Gratis over €50 |
|
DHL Paket |
+ €2 for over €30 / Gratis over €60 | + €8 for over €50 / Gratis over €80 |
|
DHL Express |
+ €10 for over €30 | + €60 for over €50 |
| Gratis forsendelsesmuligheder | Kontinentale USA | Ikke-kontinentale USA |
|---|---|---|
|
USPS Ground Advantage |
Gratis over €45 | Gratis over €60 |
|
UPS Express |
+ € 8,95 for over €45 | + € 11,95 for over €45 |
-
Visse EU-lande er ikke inkluderet i vores EU-zone definition: Storbritannien (eksklusive Irland), Schweiz, Liechtenstein, Vatikanstaten, Albanien, Hviderusland, Norge, Ukraine og Island. For ovenstående lande gælder International Shipping Rule.
- Regionerne i Ikke-kontinentale USA omfatter: Alaska, Amerikansk Samoa, Guam, Hawaii, den Marshalløerne, den Nordlige Marianerøer, Palau, Puerto Rico, den De Amerikanske Jomfruøer, den De væbnede styrker i Amerika, den De væbnede styrker i Europa, den De væbnede styrker i Stillehavet, og USA's fjerntliggende øer. Forsendelse og levering til disse områder er underlagt Forsendelsesregler for ikke-kontinentale USA.
2.4 Forsendelsesmuligheder for internationale lande:
(via Deutsche Post eller YunExpress)
| Ordrebeløb | International |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| €50 og derover | €4 |
Vigtig meddelelse:
- Bekræft venligst lagerplaceringen på produktsiden, inden du afgiver din ordre, for at bekræfte leveringstider.
- For produkter i Shenzhen lageret, sender vi typisk først produkterne fra Shenzhen lageret til vores München lager eller Long Beach lager, hvilket tager omkring 1,5 uge. Når vi modtager forsendelsen i München/Long Beach, sender vi varerne til dig. Vi arrangerer kun YunExpress forsendelse fra Shenzhen for ordrer med produkter i Shenzhen lager til en værdi af over €50.
- Hvis du afgiver en ordre med produkter fra både München og Shenzhen lagre, sender vi først produkterne fra München lageret, og derefter sender vi de resterende produkter til dig, når vi modtager dem fra Shenzhen.
3. Internationalt Lager
3.1 Tysk Lager
3.2 US-lager
3.3 Kinesisk lager
4. Told og skatter
4.1 Hvordan håndterer OpenELAB told ved import eller eksport?
4.2 Hvordan opkræves moms, når kunden afgiver en ordre hos OpenELAB?
4.3 Hvilke gebyrer opkræves udover moms?
Ikrafttrædelsesdato: 7. august 2025
Hos OpenELAB er vi forpligtet til at levere nøjagtige produktbeskrivelser og levere produkter af høj kvalitet. Hvis du oplever problemer med dit køb, bedes du underrette os inden for 30 dage efter forsendelsesdatoen.
1. Ansvarsfraskrivelse for garanti
Medmindre det udtrykkeligt er angivet i en specifik aftale eller indkøbsordre, giver OpenELAB ingen garantier—hverken udtrykkelige eller underforståede—vedrørende egnethed, anvendelighed eller salgbarhed af noget produkt til et bestemt formål eller særlig brug.
2. Garanti Politik
Garantiperiode
Den standard garantiperiode for produkter solgt af OpenELAB er 12 måneder fra leveringsdatoen.
Under denne garanti vil OpenELAB gøre en rimelig indsats for at reparere eller udskifte produkter gratis, hvis fejl skyldes problemer med råmaterialer, design eller produktion.
Hvis fejlen kvalificerer sig under denne politik, men falder uden for det dækkede omfang, kan rimelige omkostninger gælde for reparation eller udskiftning.
Efter garantiperioden kan support stadig være tilgængelig mod et rimeligt gebyr.
Garantifrakendelser
Garantien gælder ikke i følgende tilfælde:
- Produktet er uden for den 12-måneders garantiperiode.
- Skade på grund af misbrug, forkert vedligeholdelse eller opbevaring, eller manglende overholdelse af brugervejledningen eller manualen.
- Problemer forårsaget af Force Majeure-begivenheder (f.eks. naturkatastrofer, krig, lovændringer osv.).
- Uautoriserede reparationsforsøg foretaget af kunden.
- Produktet er ikke defekt, men er åbnet og kan ikke returneres ifølge politikken.
3. Returneringer & Refunderinger
Hvis du ikke er tilfreds med dit køb, kan du være berettiget til en returnering eller ombytning:
- Returnering for refundering: Inden for 15 dage efter modtagelse (uåbnet).
- Returnering for udskiftning: Inden for 30 dage efter modtagelse (beskadiget eller defekt).
- Byttevindue: Op til 30 dage fra modtagelse.
Send os venligst en e-mail på info@openelab.io for en returautorisation før du sender noget tilbage.
Returneringsbetingelser
- Varer skal være i original, ren og fejlfri stand med emballagen intakt.
- Returneringer af beskadigede, brugte, ridset, modificerede eller programmerede varer vil ikke blive accepteret.
- Inkluder kvitteringen, en kort note med dit navn, ordrenummer og årsag til returnering.
Forsendelse & Gebyrer
- Kunder er ansvarlige for returforsendelse til vores lagre i Europa, USA eller Kina.
- Hvis en returnering anmodes på grund af kundens årsager (f.eks. ændret mening, forkert ordre osv.), vil både den oprindelige forsendelsesomkostning og returforsendelsesomkostningen blive trukket fra refunderingsbeløbet.
- For returneringer på grund af kundens årsager, vil vi generere og levere en returforsendelseslabel.
Betalingsplatformgebyrer
For alle refunderinger anmodet om på grund af kundens årsager, vil et standard servicegebyr blive trukket fra refunderingsbeløbet, som opkræves af betalingsplatformene. De specifikke gebyrer er som følger:
Shopify Payments: 1,8% + €0,3
PayPal: 4,4%
