



















































































































Waveshare Suurivääntömomenttinen sarjaväyläservomoottori RoArm-M2 Pöytätason robottikäsivarsisarja
Pre-order
Ilmainen toimitus Saksassa yli 30€ ja EU:ssa yli 50€ ostoksille!
- Ennakkotilaukset lähetetään 5 arkipäivän kuluessa.
- Toimitusaika EU- ja Yhdysvaltojen maihin: 10 arkipäivää.
- Toimitusaika muihin maihin: 15 arkipäivää.
- Pre-Ordering: If an item is unavailable, you can pre-order it. We'll dispatch once stock is replenished. For specific delivery times, please feel free to contact us for inquiries.
- Express Shipping: Need it faster? Contact us via email or through our live chat support, and we'll arrange expedited delivery for you.
Waveshare Suurivääntömomenttinen sarjaväyläservomoottori RoArm-M2 Pöytätason robottikäsivarsisarja
RoArm-M2
4-DOF Suurivääntömomenttinen sarjaväyläservorobottivarsi
Tukee joustavaa laajennusta ja toissijaista kehitystä

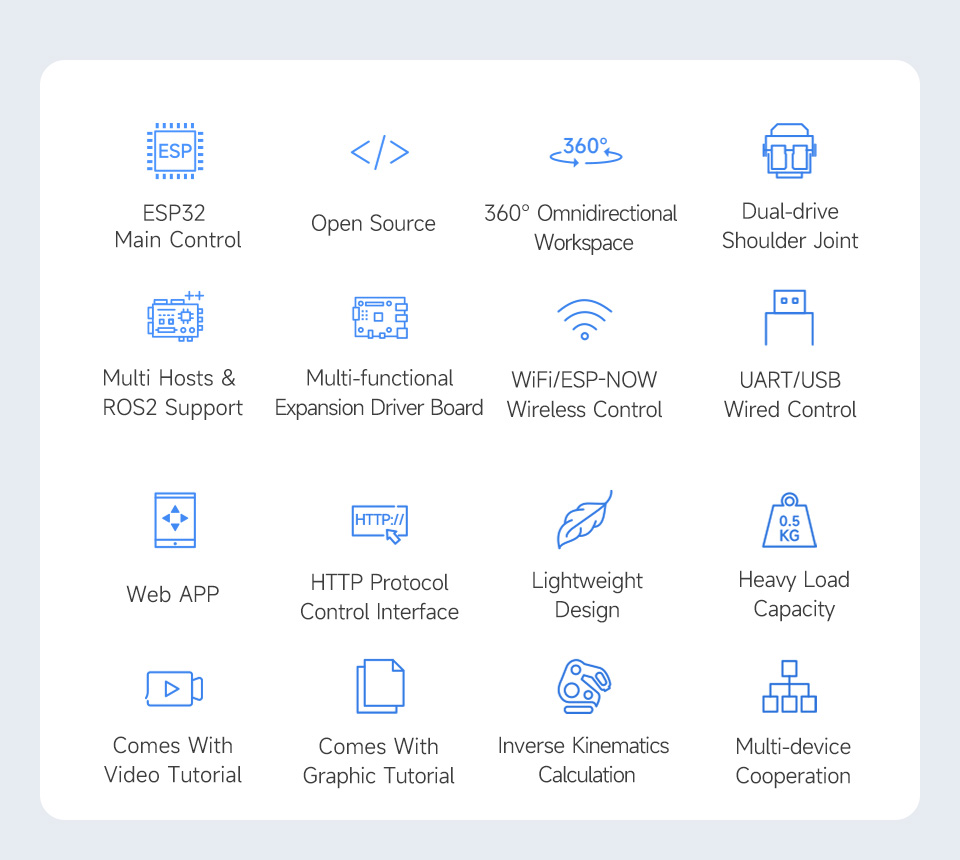
Ominaisuudet yhdellä silmäyksellä
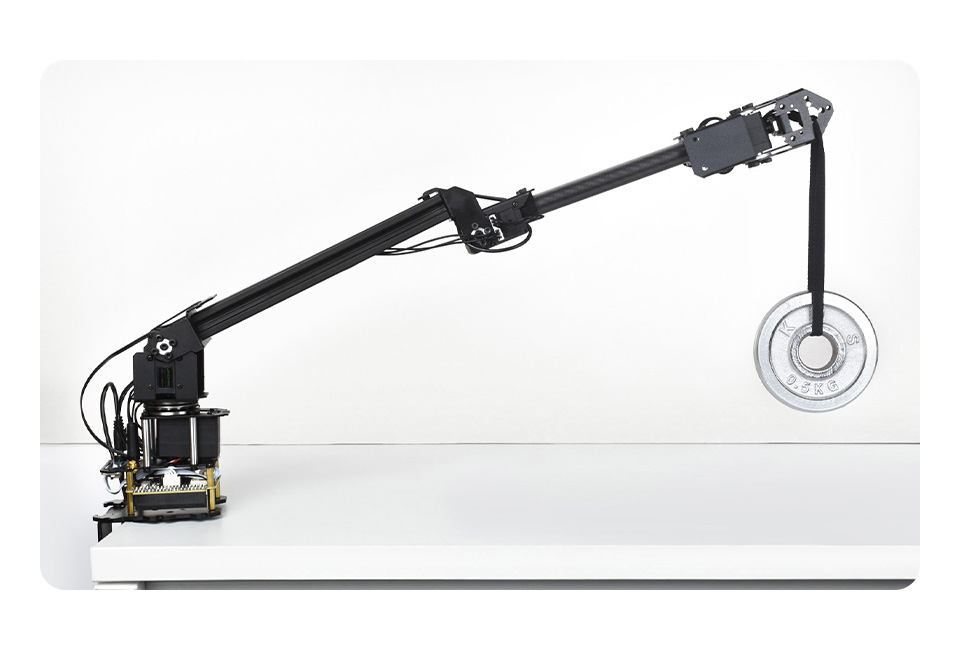
RoArm-M2-sarja on 4DOF-älykkäästi suunniteltu robottivarsi innovatiivisiin sovelluksiin. Se käyttää kevyttä rakenteellista suunnittelua, kokonaispaino alle 900 g ja tehokas kuormitus [email protected], ja se voidaan joustavasti asentaa erilaisille mobiilialustoille. Käyttää 360° monisuuntaista jalustaa, joka yhdistyy kolmeen joustavaan niveleen luoden 1 metrin halkaisijan työalueen.
Nivelten suoravetomalli parantaa uudelleenasennustarkkuutta ja myös rakenteen luotettavuutta, innovatiivisella kaksoisvetotekniikalla, joka kaksinkertaistaa olkanivelen vääntömomentin. Sisäinen ESP32 MCU -pääohjausmoduuli tukee useita langattomia ohjaustiloja, tarjoaa ohjausliitännät ja runsaasti viestintäprotokollia, jotka helpottavat yhteyttä erilaisiin laitteisiin.
Tarjoaa käyttäjäystävällisen ja alustariippumattoman WEB-sovelluksen, joka yhdistää yksinkertaisen ja visualisoidun koordinaattiohjaustilan, tehden aloittamisesta helpompaa. Mukana runsaasti graafisia ja video-oppaita, jotka auttavat oppimaan ja käyttämään sitä nopeasti. Yhteensopiva ROS2:n ja erilaisten isäntätietokoneiden kanssa, tukee erilaisia langattomia ja langallisia viestintätiloja. Mukana laajennuslevy, tukee EoAT:n (End of Arm Tooling) räätälöintiä innovatiivisten sovellusvaatimusten täyttämiseksi.
RoArm-M2-sarja saavuttaa erinomaisen tasapainon keveyden, käyttäjäystävällisyyden, laajennettavuuden ja avoimen innovaation välillä. Se on monitoiminen robottivarsi, joka yhdistää älykkään ohjauksen, ihmisen ja koneen vuorovaikutuksen sekä räätälöitävän kehityksen. Ihanteellinen sovelluksiin, jotka vaativat joustavuuden, laajennettavuuden ja käyttäjäystävällisyyden yhdistelmää.
Versiovaihtoehdot
Tarjoaa vaihtoehtoja RoArm-M2-S / RoArm-M2-Pro. Päivitetty versio RoArm-M2-Pro on varustettu kokonaan metallisilla ST3235-väyläservomoottoreilla, tarjoten kestävämmän rungon ja vakaan välyksen, joka ei kasva käytön myötä, parantaen tuotteen kestävyyttä.

Parametrien vertailu
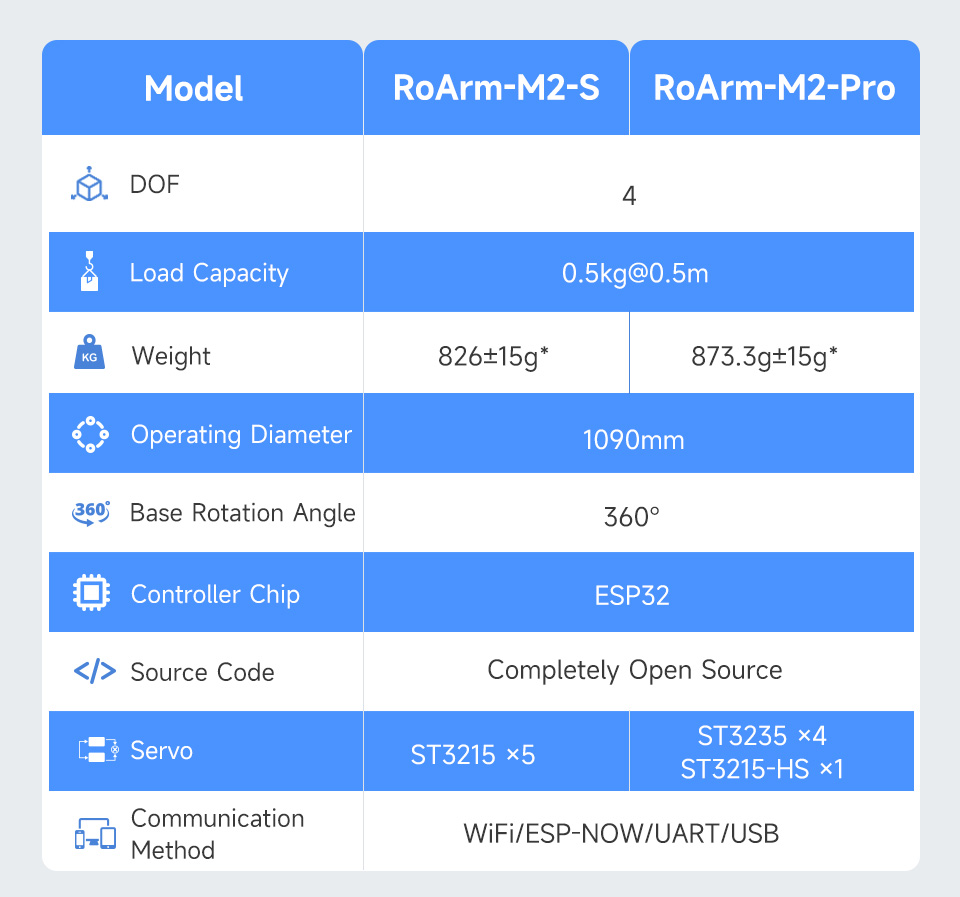
* Ei sisällä pöydän reunan kiinnityspuristimen painoa (290 g).
Useita EoAT-kiinnitystapoja
EoAT tukee erilaisia kiinnitystapoja, sitä voi käyttää puristimena tai neljäntenä vapausasteena. Tarjoaa avoimen lähdekoodin DXF- ja 3D-mallit tee-se-itse- ja toissijaiseen kehitykseen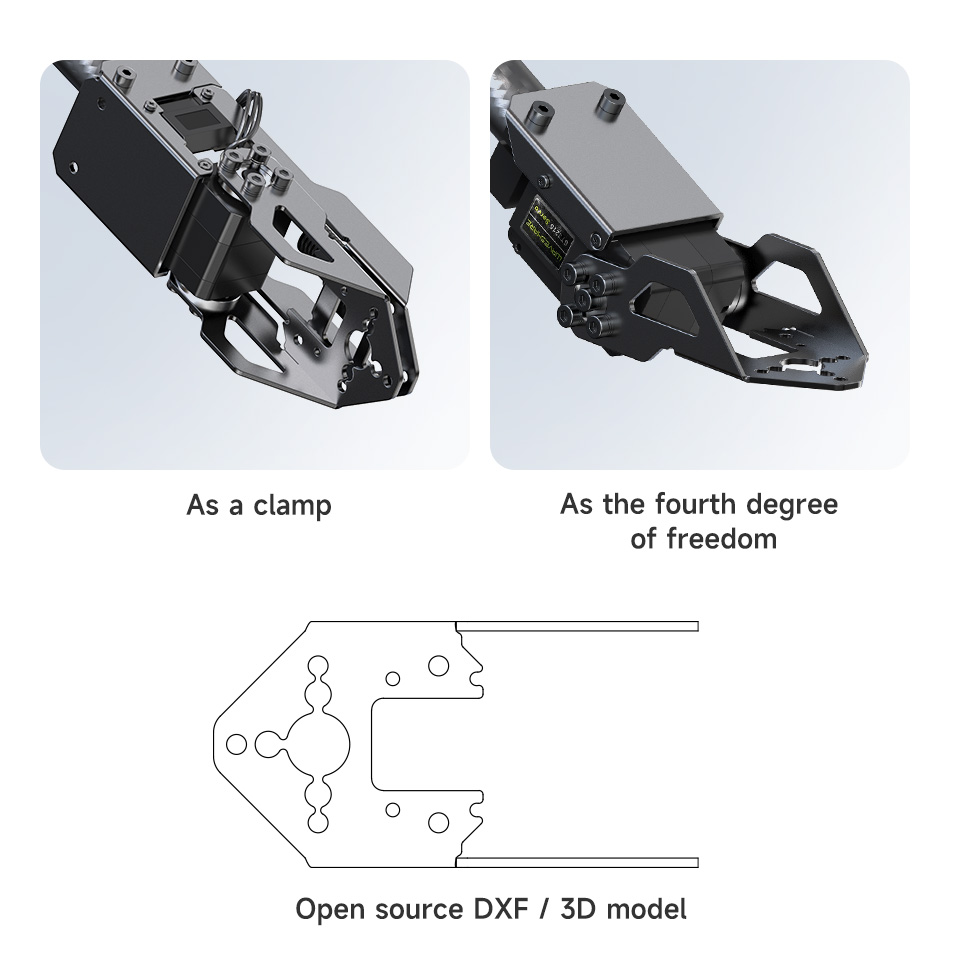
Joustavat nivelet × kaikkisuuntainen tila
Käyttää 360° kiertopohjaa ja joustavia niveliä luodakseen kaikkisuuntaisen toimintatilaan, jonka halkaisija on 1 metri, mahdollistaen EoAT:n liikkua vapaasti kaikkiin suuntiin
Helppo ohjata kautta
Monialustainen verkkosovellus
Ei vaadi sovelluksen asennusta, pääsy osoitteen syöttämisen jälkeen. Mahdollistaa käyttäjien yhdistää ja ohjata RoArm-M2:ta mobiililaitteilla, tableteilla ja tietokoneilla napsauttamalla Web Appin painikkeita. Tukee tämän avoimen lähdekoodin Web Appin toissijaista kehitystä käyttöliittymän mukauttamiseksi ja uusien toimintojen lisäämiseksi.
Täysin avoin lähdekoodi
toissijainen kehitys
Täysin avoin lähdekoodi Roarm-M2-sarjan ohjauskoodien ja viestintärajapintadokumenttien osalta, tukee useita kieliä ja laitteita toissijaiseen kehitykseen. Tarjoaa modulaarisia demoja ja opetusohjelmia aloittelijoille, helppo aloittaa.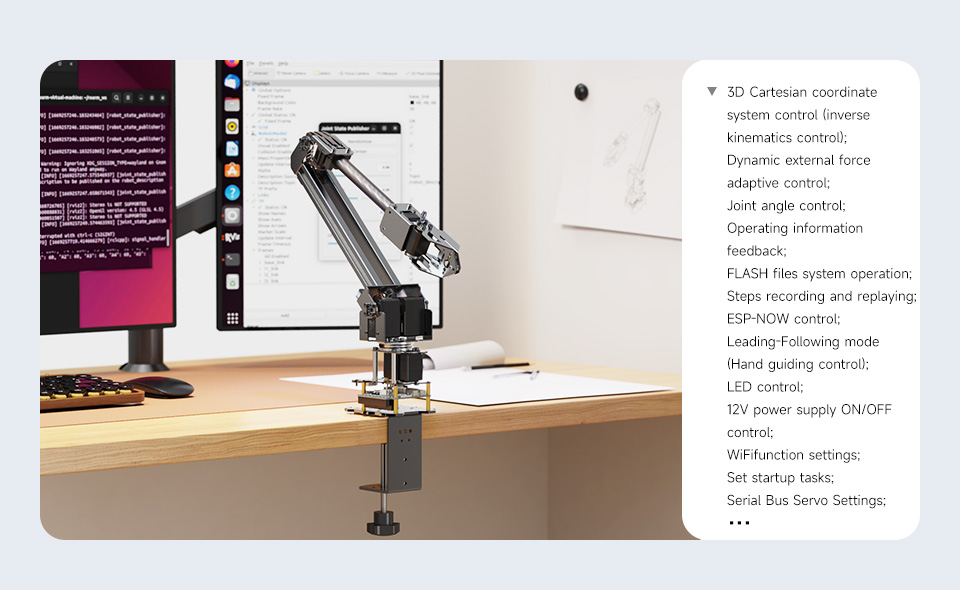
Kevyt runko, erinomainen kuormankantokyky
kevyt runko, jonka kokonaispaino on alle 900 g, käyttää hiilikuitua
ja 5052-alumiiniseosta vakauden varmistamiseksi raskaissa kuormissa,
sopii erilaisille mobiilirobottialustoille

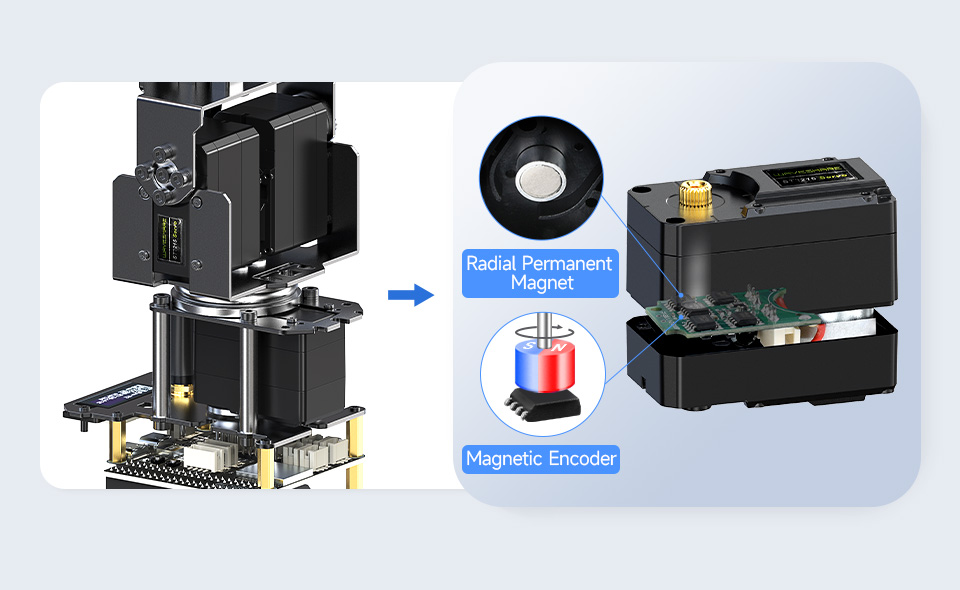
Nivelin suoravetosuunnittelu
Palautteen tarkkuus jopa 0,088°
Nivelkulman palautteen saa suoraan 12-bittisen korkean tarkkuuden magneettikooderin kautta ilman välityksiä, mikä on tarkempaa, ja nykyisen kohdepisteen todellinen sijainti voidaan laskea nivelkulman palautteen perusteella.
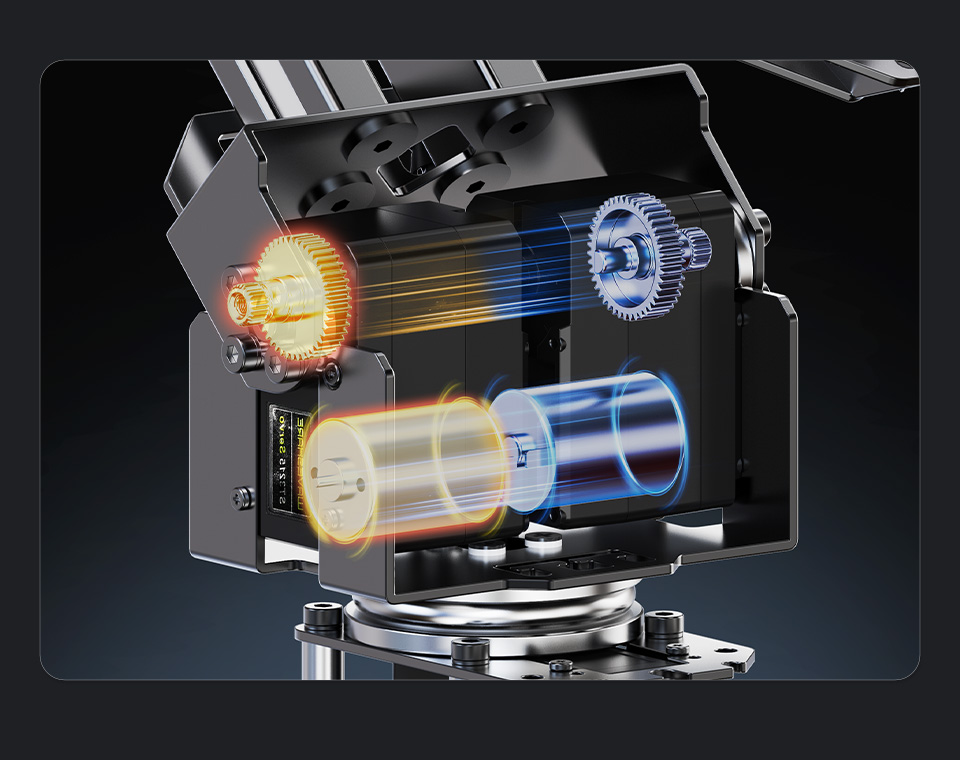
Innovatiivinen kaksoisvetoteknologia
kaksinkertaistaa olkanivelen vääntömomentin
Olemme kehittäneet kaksoisajon ohjausalgoritmin, joka sallii kahden servon tehokkaan koordinaation olkanivelessä, mikä parantaa merkittävästi
RoArm-M2-sarjan teho ja kokonaiskuormituskapasiteetti
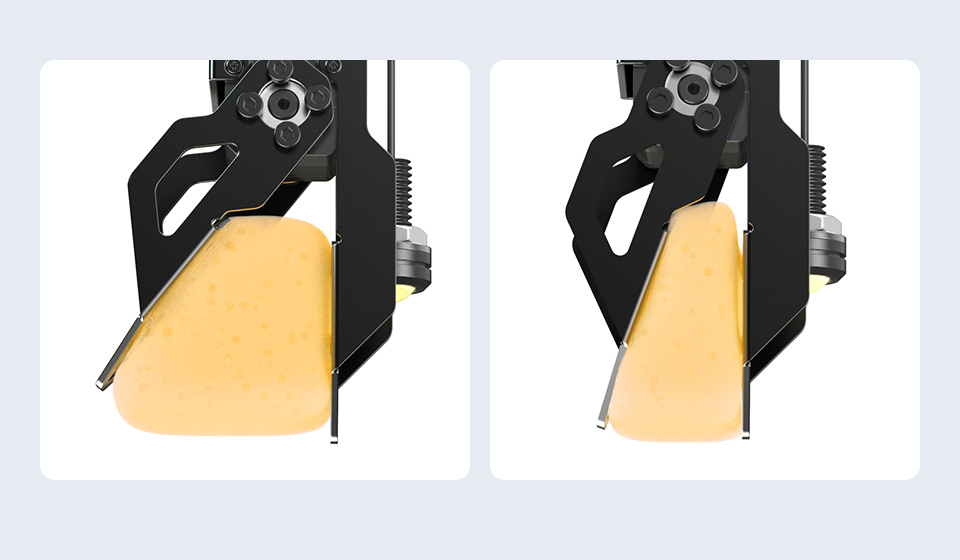
Suoravetoinen puristin mahdollistaa tarkan
voiman ohjaus
Suoravetoinen puristimen muotoilu mahdollistaa puristusvoiman tarkan ohjauksen ohjelmassa, sopii herkkiä esineitä puristettaessa ilman liiallista voimaa
Tukee kumilenkkien asentamista
vaikutuksen kompensoimiseksi
painovoiman
OLKAVARSI- ja KYNNÄS-nivelet tukevat kumilenkkien asentamista avustamaan robottivartta hyödyntämällä kumin elastista supistumista painovoiman vaikutuksen kompensoimiseksi ja robottivarren tehokkaan kuormituksen lisäämiseksi.
Dynaaminen ulkoinen voima
sopeutuva ohjaus
Tämän toiminnon aktivoimisen jälkeen voit rajoittaa kunkin nivelen maksimivääntömomentin. Kun nivelen ulkopuolelle kohdistuva voima ylittää vääntömomentin kynnyksen (määräytyy asetuksista), robottivarsi kääntyy ulkoisen voiman suuntaan ja palaa määritettyyn asentoon, kun ulkoinen voima laskee vääntömomentin kynnyksen alapuolelle.

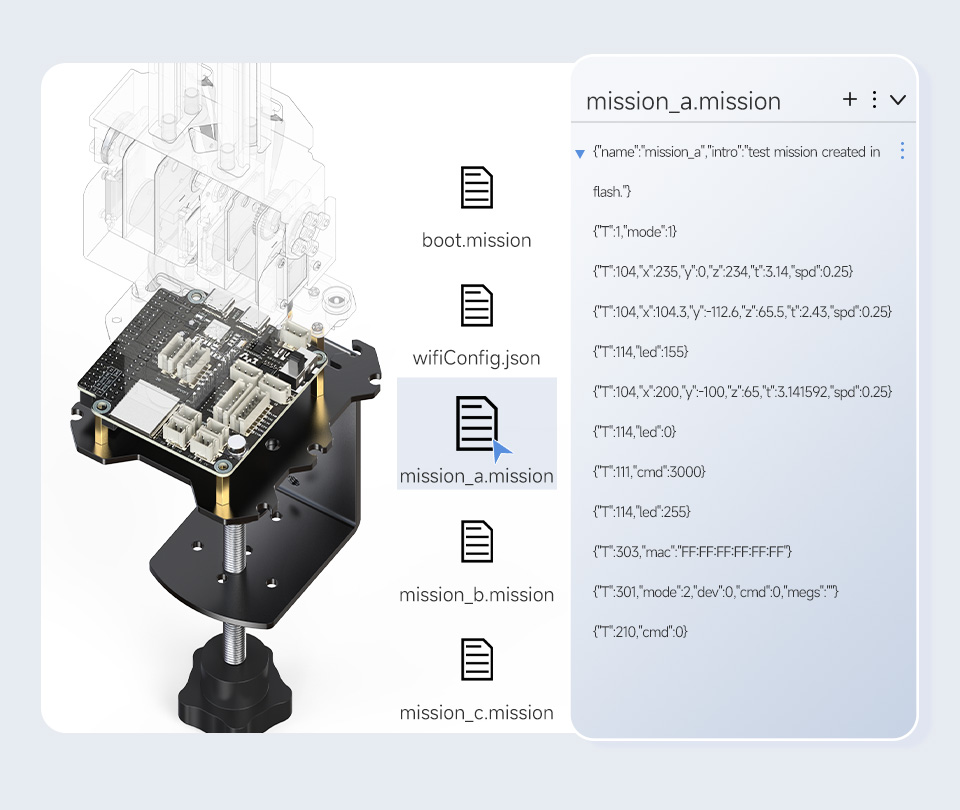
Yhden napsautuksen automaattinen tallennus
Helppo luoda toimintoja
RoArm-M2 voi tallentaa JSON-ohjeet robottiohjaukseen tehtävätiedostoina. Tehtävätiedostot voidaan tallentaa ESP32:n Flash-muistiin, jolloin ne eivät katoa sähkökatkon sattuessa. Robottivarsi voi suorittaa monimutkaisia ja toistuvia toimintoja kutsumalla näitä tehtävätiedostoja.
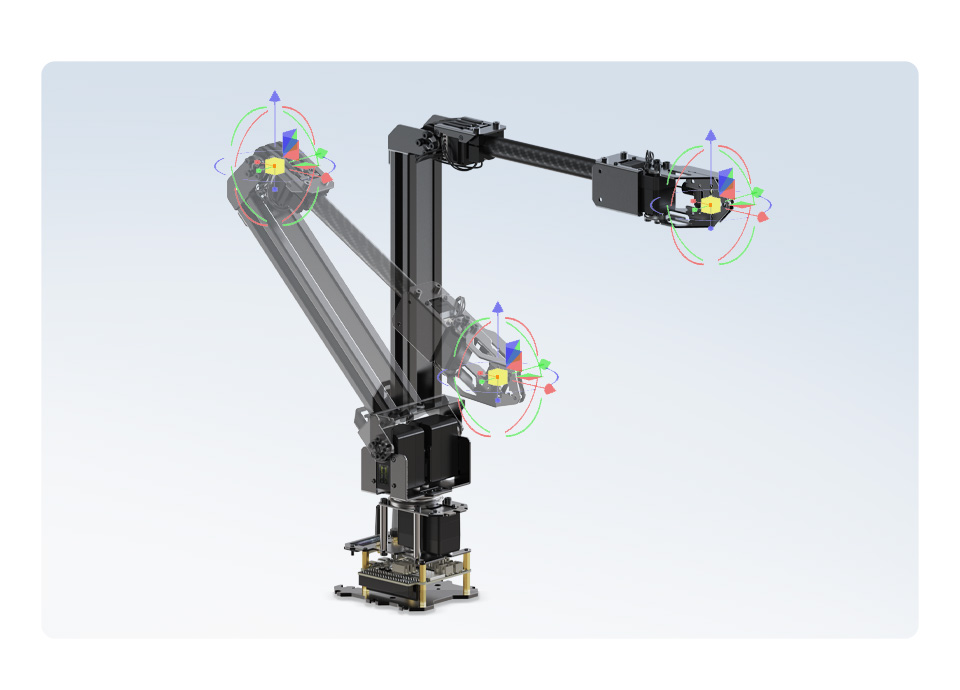
Saavuta tarkasti kohde syöttämällä koordinaatit
Avoin lähdekoodi käänteisen kineettisen ohjausalgoritmin toteutukseen kolmiulotteisessa kartesiolaisessa koordinaatistossa. Kohdeaseman syöttämisen jälkeen robottivarsi voi tarkasti saavuttaa kohdepisteen käyttämällä käänteisen kineettisen toiminnon laskemaan kunkin nivelen kiertokulman.
Käyrän nopeuden ohjaus kohteelle
Sujuvampi liike
Käytämme käyränopeuden ohjausalgoritmia, jotta robottivarsi liikkuu sulavammin ja luonnollisemmin ilman tärinöitä käynnistyksen ja pysäytyksen aikana

ESP-NOW-langaton ohjaus
Matalaviiveinen etäyhteistyö
ESP-NOW on matalaviiveinen ad hoc -langaton viestintäprotokolla, joka ei vaadi verkkoinfrastruktuuria. Voit käyttää yhtä robottivartta langattomasti ohjaamaan muita robottivarsia, ja ohjaustavat voidaan asettaa lähetysohjaukseksi, ryhmäohjaukseksi tai yksi-yhteen-ohjaukseksi.
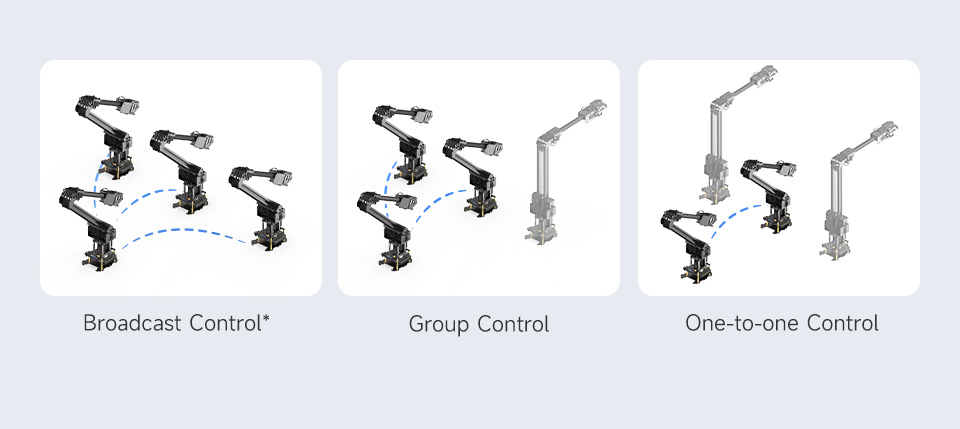
* Huom: Lähetysohjaus ei rajoita ohjattavien laitteiden määrää, kun taas ryhmäohjaus sallii enintään 20 laitetta. Katso lisätietoja WIKIstä.
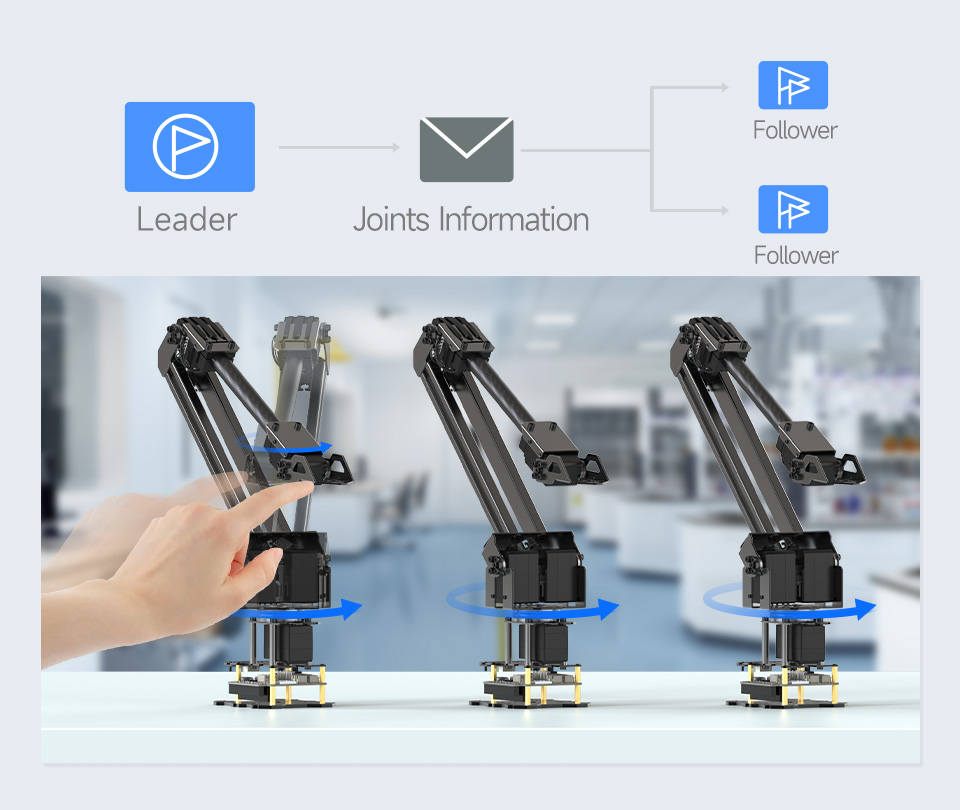
Tukee ESP-NOW-pohjaista johtaja-seuraaja-ohjaustilaa
Johtaja-seuraaja-ohjaustilassa johtajarobottivarsi lähettää nivelkulmatiedot muille robottivarsille ESP-NOW-viestinnän kautta. Muut robottivarret, jotka ovat ESP-NOW-seuraajatilassa, matkivat johtajan samoja liikkeitä reaaliajassa.
Useita ohjausliittymiä,
Useiden laitteiden ja kielten tuki
RoArm-M2-sarjaa voi ohjata paitsi WEB-sovelluksella, myös tukee muiden ohjainten käyttöä JSON-komentojen lähettämiseen HTTP-protokollan verkko- tai sarjaviestinnän tai USB-yhteyden kautta ohjaukseen ja palautteen saamiseen.
Useita asennustapoja sovellukseesi integrointiin
Tarjoaa useita asennusratkaisuja ja asiaankuuluvia toissijaisen kehityksen resursseja, sopii erilaisiin käyttötarkoituksiin ja voidaan joustavasti integroida projekteihisi ja sovelluksiisi

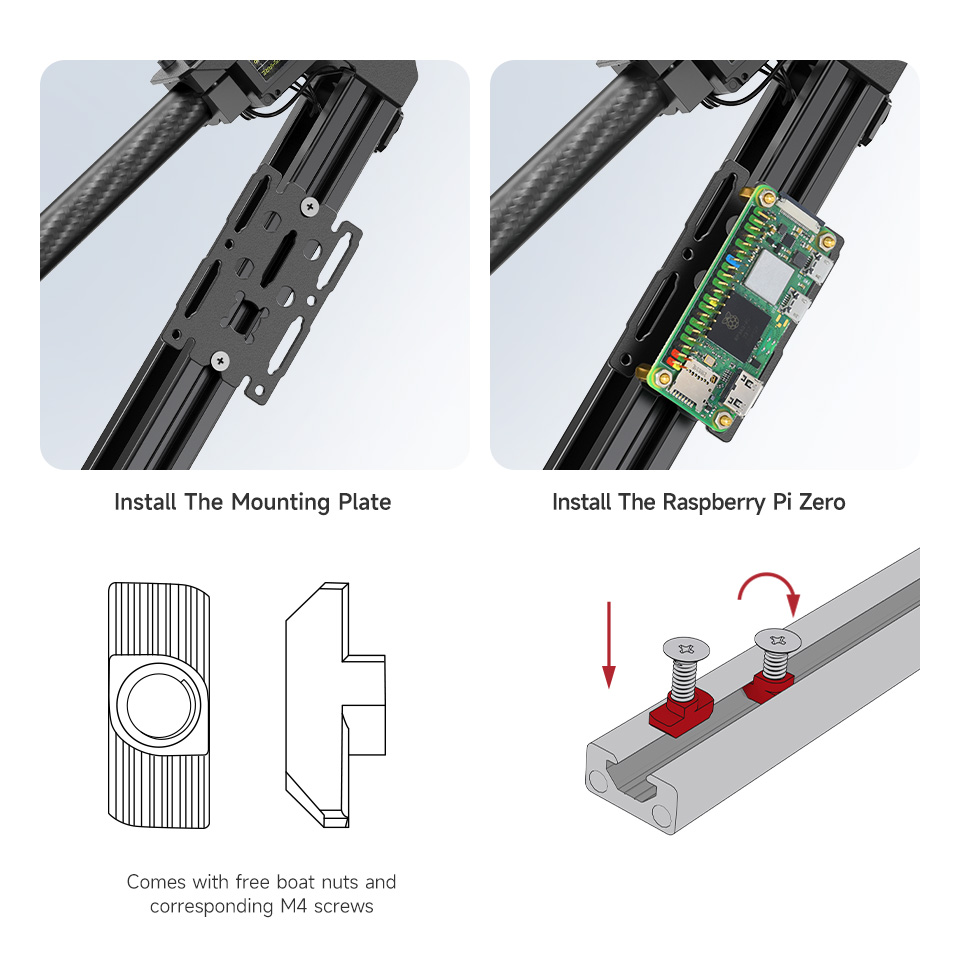
Helppo asentaa erilaisia lisälaitteita
Ylävarren päärakenne käyttää kahta 1020 eurooppalaista standardialumiinikiskoa, tukee lisälaitteiden asentamista veneen muttereiden kautta eri tarpeiden täyttämiseksi. Mukana veneen mutterit ja vastaavat M4-ruuvit helppoa asennusta varten.
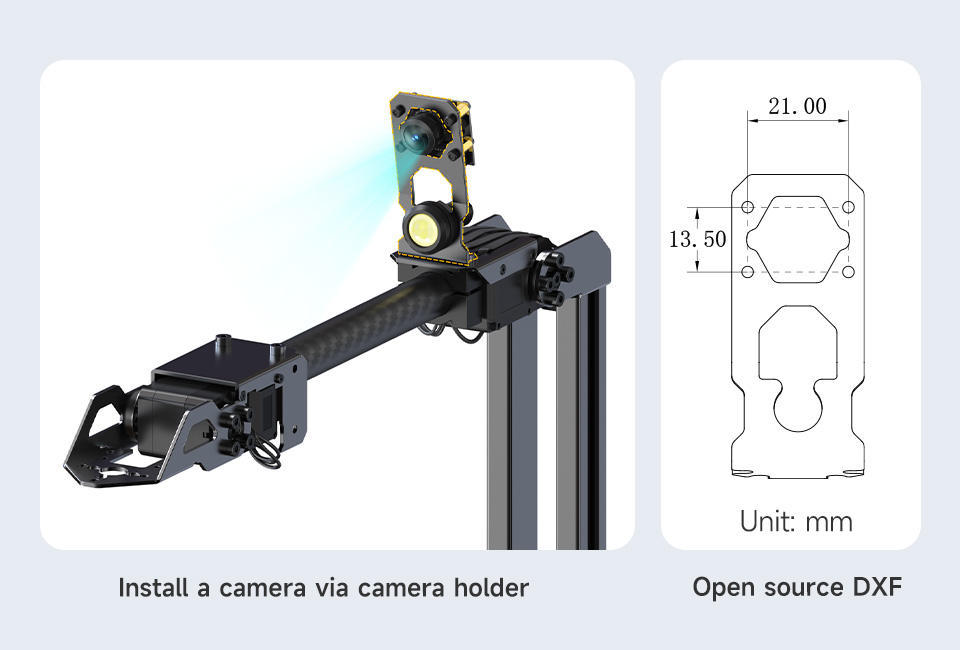
Tukee kameran asentamista
visuaalisten sovellusten laajentamiseen
Mukana kameran pidike ja avoin lähdekoodi asiaankuuluville piirustuksille.
Voit asentaa suoraan kameran vastaavalla koolla tai muita kameroita
sovittimen kanssa
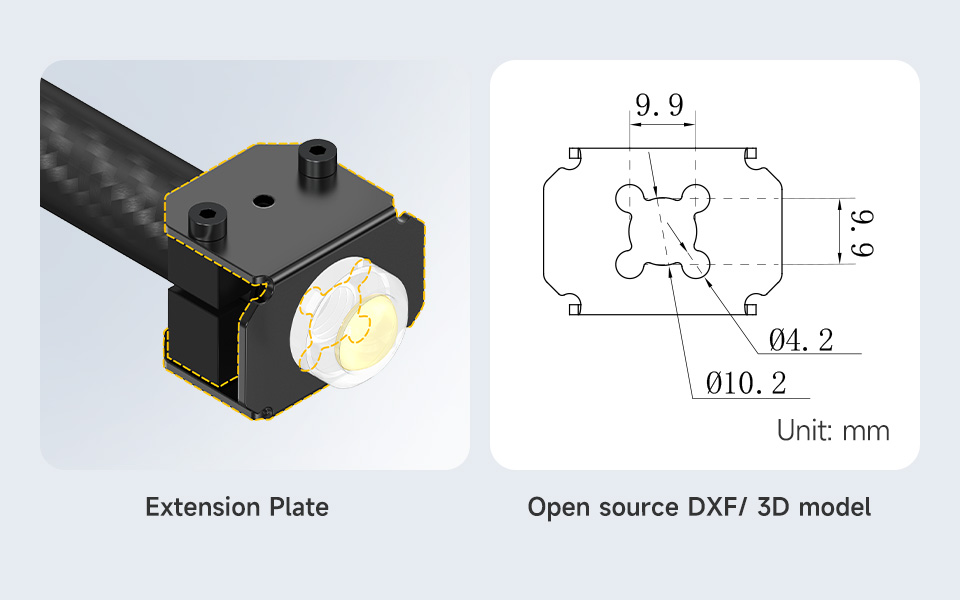
Tukee erilaisten EoAT-lisälaitteiden laajentamista
lisätoimintoja varten
Mukana laajennuslevy, helppo käyttäjille laajentaa ja vaihtaa erilaisia EoAT:ja
lisätoimintoja varten
Sisäänrakennettu ESP32-pääohjauskortti
Käyttää ESP32-tehokasta pääohjaus-MCU:ta, tukee useita langattomia viestintäprotokollia, runsaasti avoimen lähdekoodin resursseja innovatiivisten sovellusten toissijaiseen kehitykseen
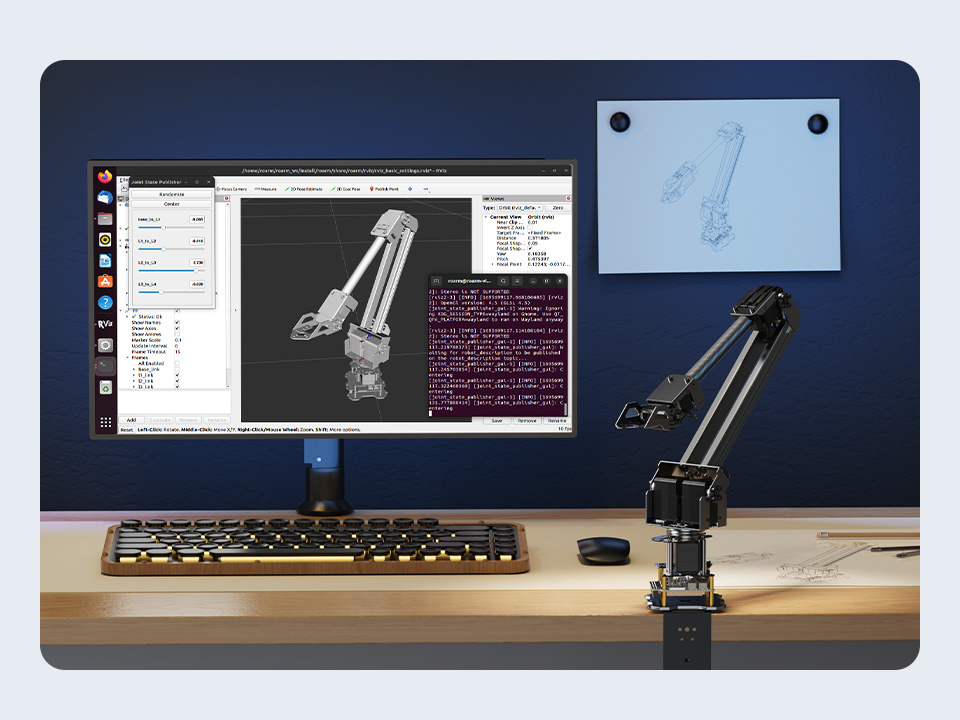
Yhteensopiva ROS2:n kanssa, tarjoaa
mallin luontitiedosto ja tukee
monilaitteinen yhteistyö
Tarjoaa ROS2:n viestintäsolmut, URDF-mallin kuvaustiedoston ja ROS2:n nollapohjaisen opetusohjelman
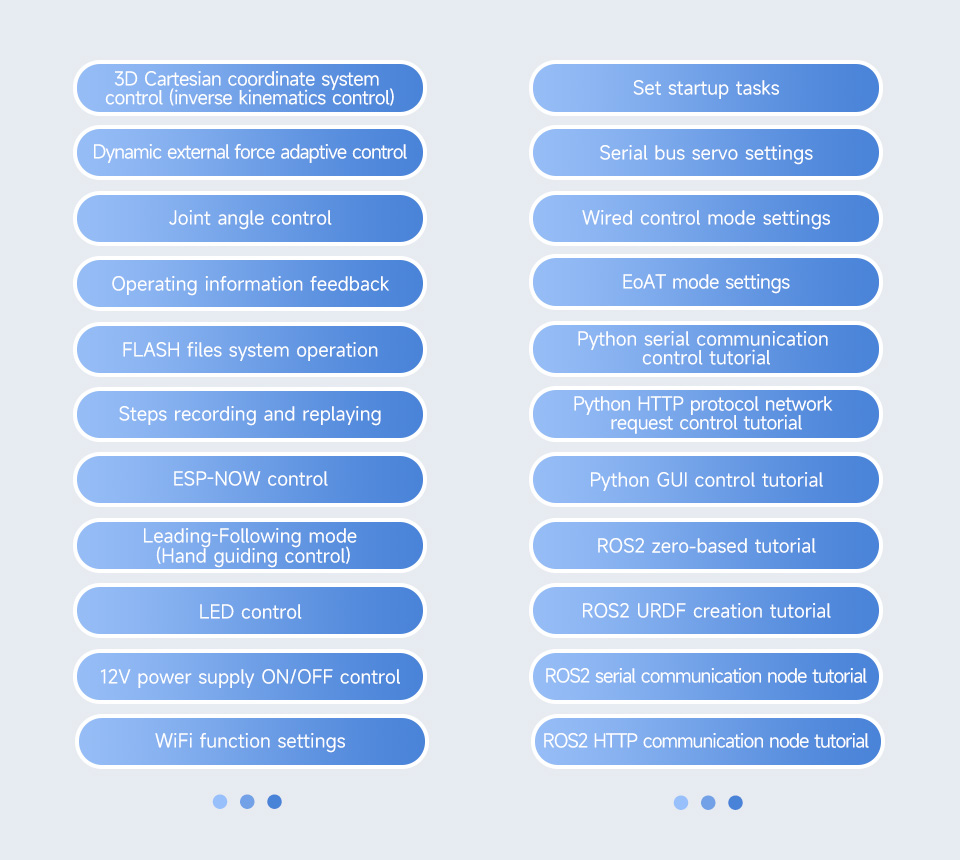
Runsaat opetusresurssit
toissijainen kehitys
Tarjoamme täydelliset yksikköoppaat ja esimerkit, mukaan lukien erilaiset toiminnot ja yleiset sovelluskohtaiset tilanteet, auttaaksemme käyttäjiä pääsemään nopeasti alkuun toissijaisessa kehityksessä
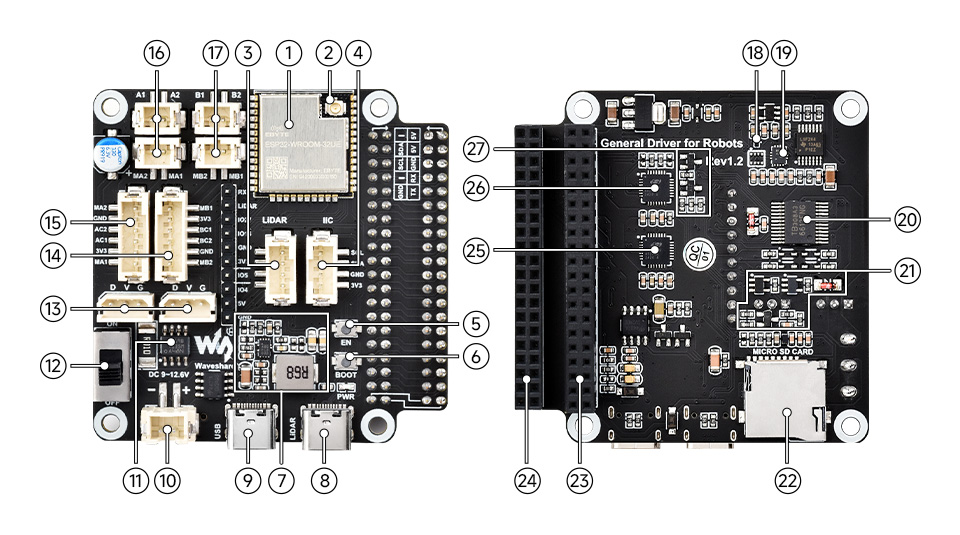
Yleinen ohjainlevy roboteille
Sisäänrakennetut monipuoliset liitännät ja resurssit innovatiiviseen kehitykseen ja toiminnalliseen laajennukseen
-
ESP32-WROOM-32-ohjausmoduuli
Voidaan kehittää Arduino IDE:llä -
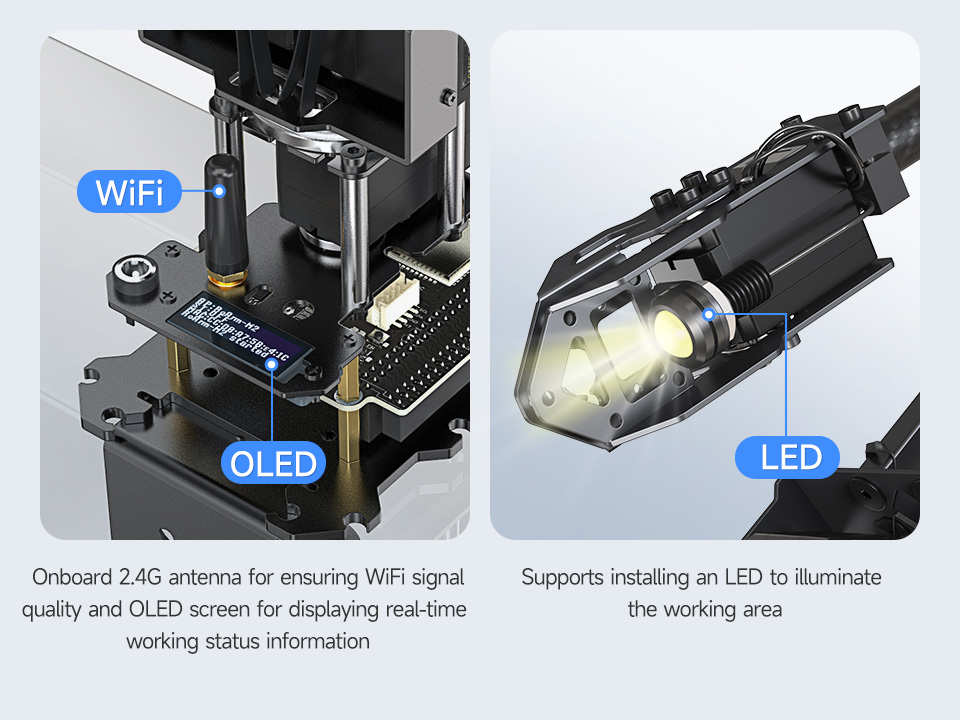
IPEX1 WIFI-liitin
WIFI-antennin liittämiseen langattoman viestinnän etäisyyden lisäämiseksi -
LIDAR-liitäntä
Integroitu tutka-adapteritoiminto -
I2C-lisälaiteliitäntä
Yhdistämistä varten OLED-näytölle tai muille I2C-antureille -
Nollauspainike
Paina ja vapauta käynnistääksesi ESP32 uudelleen -
Latauspainike
ESP32 siirtyy lataustilaan käynnistyksen jälkeen -
DC-DC 5V jänniteregulaattoripiiri
Virtalähde isäntätietokoneille kuten Raspberry Pi tai Jetson nano -
Type-C -portti (LADAR)
LIDAR-datan siirto -
Type-C -portti (USB)
ESP32 viestintäliitäntä, ohjelmien lataamiseen ESP32:lle -
XH2.54 virtaliitäntä
Tukee DC 7~13V tuloa, voi suoraan syöttää virtaa sarjaväyläservoille ja moottoreille -
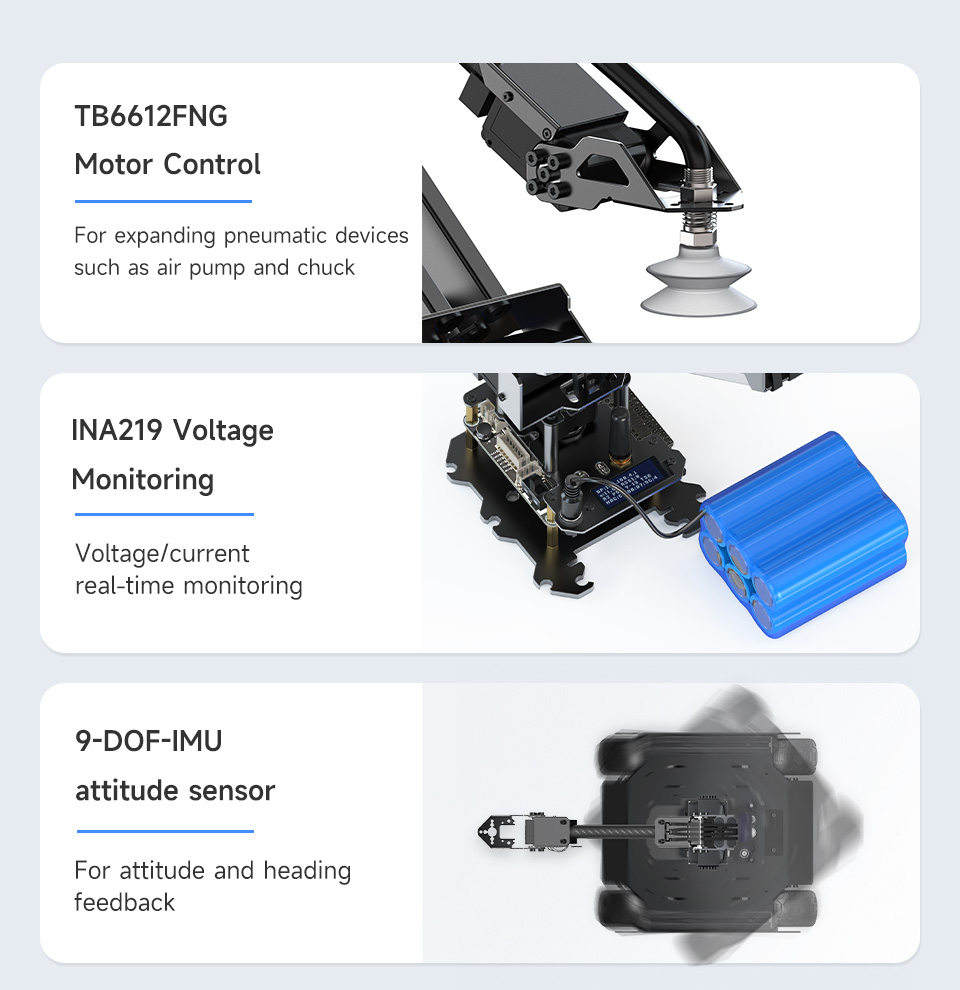
INA219
jännite/virta -valvontapiiri -
Virta PÄÄLLE/POIS
Ulkoinen virtalähde PÄÄLLE/POIS -
ST3215 sarjaväyläservon liitäntä
Yhdistämistä varten ST3215 sarjaväyläservoon -
Moottorin liitäntä PH2.0 6P
Ryhmän B liitäntä moottorille, jossa enkooderi
-
Moottorin liitäntä PH2.0 6P
Ryhmän A liitäntä moottorille enkooderilla -
Moottorin liitäntä PH2.0 2-nastainen
Ryhmän A liitäntä moottorille ilman enkooderia -
Moottorin liitäntä PH2.0 2-nastainen
Ryhmän B liitäntä moottorille ilman enkooderia -
AK09918C
3-akselinen elektroninen kompassi -
QMI8658C
6-akselinen liikeanturi -
TB6612FNG
Moottorinohjauspiiri -
Sarjaväylän servosäätöpiiri
Useiden ST3215-sarjaväyläservojen ohjaukseen ja servopalautteen saamiseen -
TF-korttipaikka
Voidaan käyttää lokien tai WIFI-asetusten tallentamiseen -
40-nastainen GPIO-liitin
Yhdistämiseen Raspberry Pi:hin tai muihin isäntäkortteihin -
40-nastainen jatkoliitin
Helppo käyttää Raspberry Pi:n tai muiden isäntäkorttien GPIO-nastoja -
CP-2102
UART USB:ksi, tutkadatan siirtoa varten -
CP-2102
UART USB:ksi, ESP32-yhteyttä varten -
Automaattinen latauspiiri
Ohjelmien lataamiseen ESP32:lle ilman EN- ja BOOT-painikkeiden painamista
Monipuoliset laitealustan resurssit
Tukee toiminnallisuuden laajennusta
Integroitu TB6612FNG moottoriohjain-IC, INA219 akun jännitteen valvonta ja 9-akselinen
IMU-anturi, tukee toiminnallisuuden laajennusta ja innovointia
Hiiren vetämis- ja pudotustoiminto
Tarjoaa Web-sovelluksia ja työpöytäsovelluksia (Pythonilla kehitettyjä avoimen lähdekoodin ohjelmia), tukee toimintakomentojen asettamista hiiren painalluksen ja vapautuksen yhteydessä
ohjata robottikättä joustavasti

Tekniset tiedot
| Vapausasteet (DOF) | 4 |
|---|---|
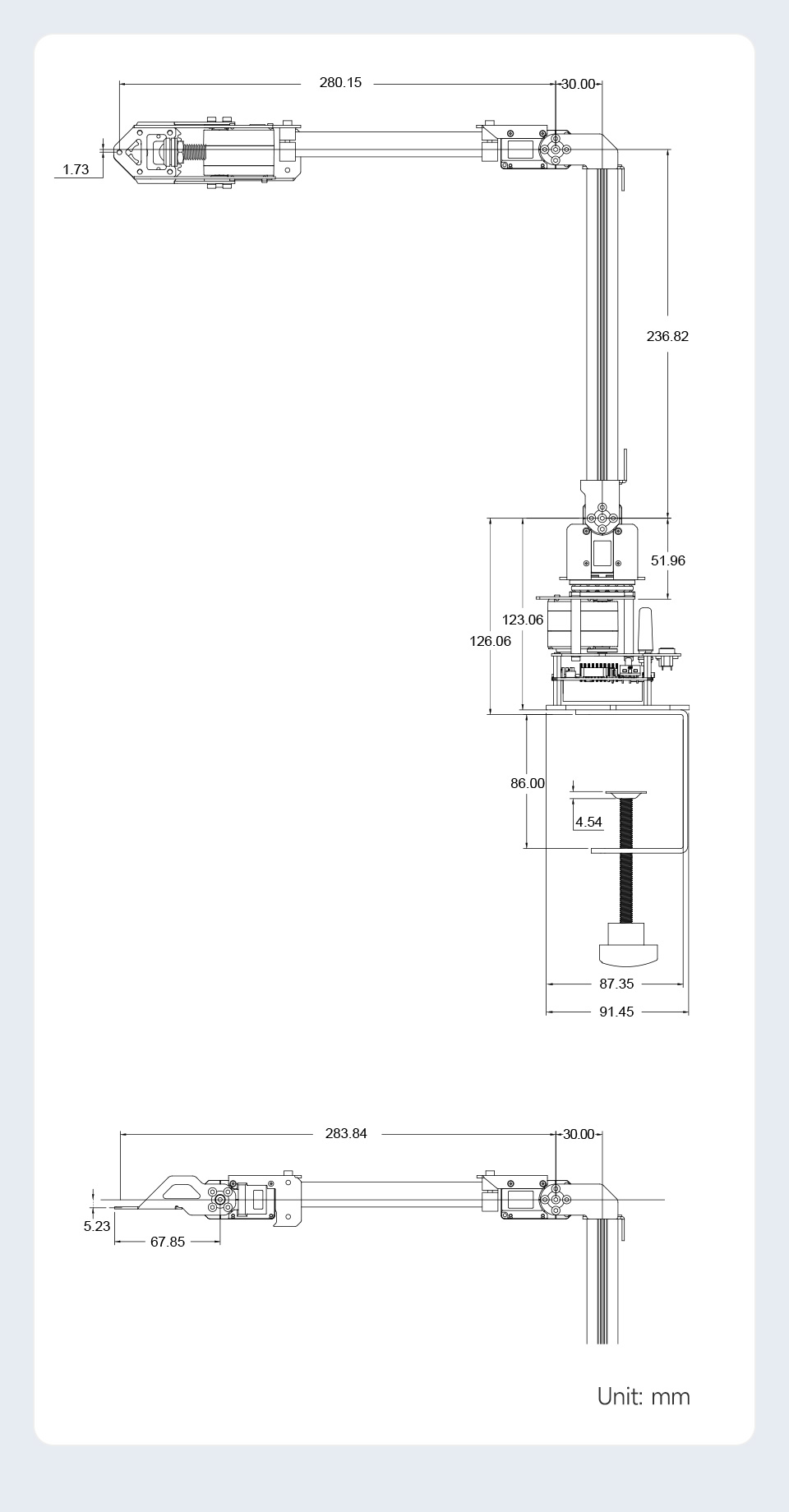
| Työtila | Vaakasuuntainen halkaisija: 1090mm (Max, 360° monisuuntainen), Pystysuora: 798mm (Max) |
| Käyttöjännite | 12V 5A virtalähde, tukee 3S Litium-akkuja (EI sisälly) |
| Kuormankantokyky | 0.5kg@0.5m |
| Uudelleenasennuksen tarkkuus | ≈±4mm (saman kuorman alla) |
| Servon pyörimisnopeus | 40rpm (kuormittamaton, ilman vääntömomentin rajoitusta) |
| Käyttöalue | BASE-360°, OLKAVARSI-180°, KYNNÄS-180°, KÄSI-135°/270° |
| Ajo tyyppi | TTL-sarjaväylän servo, suoraohjattu nivel |
| Servojen lukumäärä | 5 |
| Nivelkulman anturi | 12-bittinen 360° magneettinen enkooderi |
| Servovääntö | 30KG.CM @12V |
| Nivelpalaute | servon tila, nivelkulma, pyörimisnopeus, nivelkuorma, servon jännite, servon virta, servon lämpötila ja servon toimintatila |
| Pääohjaus | ESP32-WROOM-32 |
| Pääohjausmoduulin ominaisuudet | WiFi, BT, Dual Core, 240MHz |
| Langaton ohjaustila | 2.4G-WiFi, ESP-NOW |
| Langallinen ohjaustila | USB, UART |
| Manuaalinen toimintatila | WEB-ohjausliitäntä |
| Isäntäkoneen toimintatila | UART/USB/ESP-NOW*/HTTP -viestintä JSON-datamuotoisten komentojen kautta (* ei tue palautetietojen saamista ESP-NOW -viestintää käytettäessä) |
| Isäntätuki | USB-liitäntäiset laitteet, mukaan lukien Raspberry Pi, Jetson Orin Nano ja PC. |
| EoAT-toiminto | puristintoiminto oletuksena, voidaan muuttaa lisävapausasteeksi |
| LED-teho | ≤1,5W |
| OLED-näytön koko | 0.91inch |
| Muut toiminnot | 2-kanavainen 12V virtakytkin, 9-DOF IMU |
| Robottivarren paino | RoArm-M2-S: 826 ±15g RoArm-M2-Pro: 873,3 ±15g (ei sisällä pöydän reunan kiinnityspuristinta) |
| pöydän reunan kiinnityspuristimen paino | 290g ±10g |
| Puristimen tukeman pöydän reunan paksuus | <72mm |
| Demo | 3D kartesiolainen koordinaatistojärjestelmän ohjaus (käänteinen kinematiikka); Dynaaminen ulkoisen voiman adaptiivinen ohjaus; Nivelkulman ohjaus; Käyttötietojen palautus; FLASH-tiedostojärjestelmän toiminta; Askelten tallennus ja toisto; ESP-NOW-ohjaus; Johtaja-Seuraaja-tila (käsiohjaus); LED-ohjaus; 12V virtalähteen päälle/pois -ohjaus; WiFi-toiminnon asetukset; Käynnistystehtävien asetus; Sarjaväylän servon asetukset; Palautetilan asetus; EoAT-tilan asetus jne. (Huom: Lisätietoja löytyy WIKIstä) |
Tuotenäyttö

Mitat
1. Yleiset toimitustiedot
- Tarjoamme ensiluokkaiset toimitustavat, joihin sisältyy seurantanumero jokaiselle tilaukselle.
-
Toimitusosoite tulee syöttää englanniksi ilman erikoismerkkejä, jotta kuriiriyritys tunnistaa osoitteesi järjestelmässä. Lähetämme tilauksesi antamasi toimitusosoitteen mukaan. Ilmoitathan osoitteen muutoksesta ennen kuin tilauksesi tila muuttuu "Lähetetty"-tilaan, jotta paketin katoaminen voidaan välttää.
-
Ota välittömästi yhteyttä asiakaspalveluumme, jos haluat peruuttaa tai muuttaa tilausta. Kun tilauksesi tila on "Lähetetty", sitä ei voi enää peruuttaa tai muuttaa millään tavalla. Välttääksesi ongelmat, tarkista ostoskori uudelleen ennen kassalle siirtymistä.
-
Voimme lähettää kaikki varastossa olevat tilaukset 1 arkipäivän kuluessa tilauksesi vahvistamisesta.
-
Kaikki tuotteet tarkastetaan ennen lähettämistä ja pakataan huolellisesti käsin.
-
Tavallisen kuriirikäytännön mukaan sinun tulee tarkistaa paketin sisältö ennen tavaroiden vastaanottamista. Muuten emme ole vastuussa mahdollisista kuljetuksen aikana tapahtuneista vahingoista.
2. Toimitusvaihtoehdot Saksaan, EU*-maihin ja Yhdysvaltoihin
(Tuotteille Münchenin varastossa, Long Beachin varastossa)
2.1 Tilaukset, joiden arvo ei ylitä 5 €:
Toimitusvaihtoehdot:
| Toimitusvaihtoehdot | Saksa | EU* |
|---|---|---|
|
Deutsche Post |
€6 Saapuu 3–4 arkipäivässä |
€15 Saapuu 5–9 arkipäivässä |
| Toimitusvaihtoehdot | Manner-Yhdysvallat | Manner-Yhdysvaltojen ulkopuolinen |
|---|---|---|
|
USPS Ground Advantage |
€7.95 Saapuu 3–7 arkipäivässä |
€8.95 Saapuu 5–9 arkipäivässä |
|
UPS Express |
€13.95 Saapuu 2–4 arkipäivässä |
€17.95 Saapuu 3–7 arkipäivässä |
2.2 Toimitusvaihtoehdot 5 €:n ja 30 €:n tilausarvon välillä Saksassa, 5 €:n ja 50 €:n välillä EU:ssa tai 5 €:n ja 45 €:n välillä Yhdysvalloissa:*
Toimitusvaihtoehdot:
| Toimitusvaihtoehdot | Saksa | EU* |
|---|---|---|
|
Deutsche Post |
€3.5 Saapuu 3–4 arkipäivässä |
€6 Saapuu 5–9 arkipäivässä |
|
DHL Paket |
€6 Saapuu 2–3 arkipäivässä |
€15 Saapuu 3–7 arkipäivässä |
|
DHL Express |
€14 Saapuu 1–2 arkipäivässä |
€65 Saapuu 2–3 arkipäivässä |
| Toimitusvaihtoehdot | Manner-Yhdysvallat | Manner-Yhdysvaltojen ulkopuolinen |
|---|---|---|
|
USPS Ground Advantage |
€4.95 Saapuu 3–7 arkipäivässä |
€6.95 Saapuu 5–9 arkipäivässä |
|
UPS Express |
€11.95 Saapuu 2–4 arkipäivässä |
€13.95 Saapuu 3–7 arkipäivässä |
2.3 Ilmaiset toimitusvaihtoehdot yli 30 €:n tilauksille Saksassa, yli 50 €:n tilauksille EU*:ssa tai yli 45 €:n tilauksille Yhdysvalloissa:
| Ilmaiset toimitusvaihtoehdot | Saksa | EU* |
|---|---|---|
|
Deutsche Post |
Ilmainen yli 30 €:n tilauksista | Ilmainen yli 50 €:n tilauksista |
|
DHL Paket |
+ 2 € yli 30 €:n tilauksista / ilmainen yli 60 €:n tilauksista | + 8 € yli 50 €:n tilauksista / ilmainen yli 80 €:n tilauksista |
|
DHL Express |
+ 10 € yli 30 €:n ostoksille | + 60 € yli 50 €:n ostoksille |
| Ilmaiset toimitusvaihtoehdot | Manner-Yhdysvallat | Manner-Yhdysvaltojen ulkopuolinen |
|---|---|---|
|
USPS Ground Advantage |
Ilmainen yli 45 €:n ostoksille | Ilmainen yli 60 €:n ostoksille |
|
UPS Express |
+ 8,95 € yli 45 €:n ostoksille | + 11,95 € yli 45 €:n ostoksille |
-
Tietyt EU-maat eivät sisälly EU-alueemme määritelmään: Yhdistynyt kuningaskunta (pois lukien Irlanti), Sveitsi, Liechtenstein, Vatikaanivaltio, Albania, Valko-Venäjä, Norja, Ukraina ja Islanti. Edellä mainittuihin maihin sovelletaan kansainvälisen toimituksen sääntöä.
- Alueet Manner-Yhdysvaltojen ulkopuolinen sisältää: Alaska, Amerikan Samoa, Guam, Havaiji, Marshallinsaaret, Pohjois-Mariaanit, Palau, Puerto Rico, Yhdysvaltain Neitsytsaaret, Amerikan asevoimat, Euroopan asevoimat, Tyynenmeren asevoimat, ja Yhdysvaltojen ulkoiset saaret. Näiden alueiden toimitus ja kuljetus ovat alisteisia Manner-Yhdysvaltojen ulkopuolisten alueiden toimitussäännöt.
2.4 Toimitusvaihtoehdot kansainvälisille maille:
(Deutsche Postin tai YunExpressin kautta)
| Tilaussumma | Kansainvälinen |
|---|---|
| €0 - €15 | €8 |
| €15 - €30 | €7 |
| €30 - €50 | €6 |
| 50 € ja yli | €4 |
Tärkeä ilmoitus:
- Varmista varaston sijainti tuotteen sivulla ennen tilauksen tekemistä toimitusaikataulujen varmistamiseksi.
- Ftai Shenzhenin varaston tuotteille lähetämme tyypillisesti ensin tuotteet Shenzhenin varastosta Münchenin tai Long Beachin varastoomme, mikä kestää noin 1,5 viikkoa. Saatuamme lähetyksen Münchenissä/Long Beachissa lähetämme tuotteet sinulle. Järjestämme YunExpress-toimituksen Shenzhenistä vain tilauksille, joiden Shenzhenin varaston tuotteiden arvo on yli 50 €.
- Jos jos teet tilauksen, jossa on tuotteita sekä Münchenin että Shenzhenin varastoista, lähetämme ensin Münchenin varaston tuotteet ja sen jälkeen toimitamme jäljellä olevat tuotteet, kun saamme ne Shenzhenistä.
3. Kansainvälinen varasto
3.1 Saksan varasto
3.2 Yhdysvaltain varasto
3.3 Kiinan varasto
4. Tullit ja verot
4.1 Miten OpenELAB hoitaa tullit tuonnissa tai viennissä?
4.2 Miten arvonlisävero veloitetaan, kun asiakas tekee tilauksen OpenELABilta?
4.3 Millaisia maksuja peritään arvonlisäveron lisäksi?
Voimaantulopäivä: 7. elokuuta 2025
OpenELAB on sitoutunut tarjoamaan tarkat tuotekuvaukset ja toimittamaan korkealaatuisia tuotteita. Jos kohtaat ongelmia ostoksesi kanssa, ilmoitathan siitä meille 30 päivän kuluessa lähetyspäivästä.
1. Takuuvelvoitteiden poissulkeminen
Ellei erikseen mainita tietyssä sopimuksessa tai ostotilauksessa, OpenELAB ei anna mitään nimenomaisia tai hiljaisia takuita tuotteen soveltuvuudesta, tarkoituksenmukaisuudesta tai kauppakelpoisuudesta tiettyyn käyttötarkoitukseen tai erityiskäyttöön.
2. Takuuohjeet
Takuuajan
OpenELABin myymien tuotteiden normaali takuu on 12 kuukautta toimituspäivästä lukien.
Tämän takuun puitteissa OpenELAB pyrkii kohtuullisesti korjaamaan tai vaihtamaan tuotteet ilmaiseksi, jos viat johtuvat raaka-aineista, suunnittelusta tai valmistuksesta.
Jos vika kuuluu tämän politiikan piiriin mutta ei kuulu katettuun laajuuteen, korjaus- tai vaihtokustannuksista voidaan periä kohtuullinen maksu.
Takuuajan jälkeen tuki saattaa olla saatavilla kohtuullista maksua vastaan.
Takuupoissulkemukset
Takuu ei koske seuraavia tapauksia:
- Tuote on yli 12 kuukauden takuuajan.
- Vahingot, jotka johtuvat väärinkäytöstä, virheellisestä huollosta tai säilytyksestä tai käyttöohjeen tai manuaalin noudattamatta jättämisestä.
- Ongelmat, jotka johtuvat ylivoimaisista esteistä (esim. luonnonkatastrofit, sota, lakimuutokset jne.).
- Asiakkaan luvattomat korjausyritykset.
- Tuote ei ole viallinen, mutta se on avattu eikä palautusoikeutta ole käytännön mukaan.
3. Palautukset & hyvitykset
Jos et ole tyytyväinen ostokseesi, saatat olla oikeutettu palautukseen tai vaihtoon:
- Palautus hyvitystä varten: Vastaanottamisesta 15 päivän sisällä (avaamaton).
- Vaihto korvaavaan tuotteeseen: Vastaanottamisesta 30 päivän sisällä (vahingoittunut tai viallinen).
- Vaihtoikkuna: Enintään 30 päivää vastaanottamisesta.
Lähetä meille sähköpostia osoitteeseen info@openelab.io pyydä palautuslupa ennen kuin lähetät mitään takaisin.
Palautusehdot
- Tuotteiden tulee olla alkuperäisessä, puhtaassa ja moitteettomassa kunnossa pakkauksineen.
- Vaurioituneiden, käytettyjen, naarmuuntuneiden, muokattujen tai ohjelmoitujen tuotteiden palautuksia ei hyväksytä.
- Liitä mukaan kuitti, lyhyt viesti nimelläsi, tilausnumerolla ja palautuksen syyllä.
Toimitus & maksut
- Asiakkaat vastaavat palautuskuluista varastoihimme Euroopassa, Yhdysvalloissa tai Kiinassa.
- Jos palautus pyydetään asiakkaan syistä (esim. mielipiteen muutos, virheellinen tilaus jne.), sekä alkuperäinen toimituskulu että palautuskulu vähennetään hyvityssummasta.
- Asiakassyistä palautuksissa luomme ja toimitamme palautuslähetyslabelin.
Maksualustan maksut
Kaikista asiakkaan syistä pyydetyistä hyvityksistä hyvityssummasta vähennetään maksualustojen veloittama vakio palvelumaksu. Tarkemmat maksut ovat seuraavat:
Shopify Payments: 1,8 % + 0,3 €
PayPal: 4,4 %
